






全套大气层内航天器飞行动力学matlab仿真模型
该MATLAB仿真模型涉及到航天器在地球大气层内的运动规律、控制策略以及飞行性能分析。
在MATLAB环境中,构建了大气层内航天器的六自由度模型,即考虑航天器在三维空间中的位置(x, y, z)和姿态(俯仰、偏航、滚转)的变化。这些动态方程通常基于牛顿第二定律和欧拉运动方程建立,结合大气阻力、重力、地球自转等多种因素的影响。 通过定义大气层的物理参数,如密度、压强、温度等,利用这些参数计算航天器受到的气动载荷,包括阻力和升力。
对于复杂形状的航天器,可能需要进行气动特性预估或通过风洞实验获取数据。
本模型考虑地球引力场的影响。地球引力模型可以简化为球谐函数,或者采用更精确的高阶模型,如EGM96或GGM05C。通过这些模型,可以计算出航天器在不同高度处的引力分量。 在确定了所有外力后,我们构建了动力学方程,并将其转化为状态空间形式。涉及微分方程组的求解,我们利用MATLAB的ode45等内置求解器进行处理。
同时,我们还定义了初始条件,比如初始位置、速度和姿态角。 在仿真过程中,加入控制器设计,如PID控制器或滑模控制,以确保航天器按照预定轨迹飞行或执行特定任务。这些控制律通过线性化或非线性优化方法来设计,并集成到仿真模型中。
此外,MATLAB的Simulink环境提供了图形化建模工具,可以直观地搭建系统模型并进行实时仿真。通过Simulink,我们方便地实现硬件在环测试,验证控制系统的性能。
仿真结果的分析和可视化也是必不可少的。本MATLAB模型提供了丰富的数据分析工具和图形绘制功能,可以用于评估飞行轨迹、速度、加速度等关键指标,以及控制系统的效果。
大气层内航天器飞行动力学MATLAB仿真模型是一个综合性的工程问题,涵盖了流体力学、航天器动力学、控制理论等多个领域的知识。通过修改本M文件代码可以构建精确的仿真模型,对航天器的飞行性能进行深入研究和优化。
文章目录
构建一个完整的大气层内航天器飞行动力学MATLAB仿真模型是一个复杂的任务,涉及到多个学科的知识。以下是一个简化版的MATLAB代码示例,用于模拟大气层内航天器的六自由度运动。这个代码包括了基本的动力学方程、地球引力模型、气动载荷计算和PID控制器设计。
% 六自由度航天器飞行动力学仿真模型
clc;
clear;
% 常量定义
Re = 6371e3; % 地球半径 (m)
g0 = 9.81; % 标准重力加速度 (m/s^2)
rho0 = 1.225; % 海平面空气密度 (kg/m^3)
H_scale = 8500; % 大气标高 (m)
% 初始条件
x0 = [0; 0; 100e3]; % 初始位置 (m) [x, y, z]
v0 = [7000; 0; 0]; % 初始速度 (m/s) [vx, vy, vz]
q0 = [1; 0; 0; 0]; % 四元数初始姿态 [qw, qx, qy, qz]
w0 = [0; 0; 0]; % 初始角速度 (rad/s) [wx, wy, wz]
state0 = [x0; v0; q0; w0];
% 时间设置
tspan = [0 1000]; % 仿真时间 (s)
% 调用ODE求解器
[t, state] = ode45(@(t, state) dynamics(t, state), tspan, state0);
% 动力学方程
function dstate = dynamics(~, state)
x = state(1:3); % 位置
v = state(4:6); % 速度
q = state(7:10); % 四元数
w = state(11:13); % 角速度
% 计算高度
r = norm(x);
h = r - Re;
% 大气密度模型
rho = rho0 * exp(-h / H_scale);
% 气动力计算 (简单模型)
Cd = 0.5; % 阻力系数
A = 10; % 参考面积 (m^2)
D = 0.5 * rho * norm(v)^2 * Cd * A; % 阻力
L = 0; % 升力 (假设为零)
% 引力计算
g = -(g0 * (Re / r)^2) * x / r; % 简化的引力模型
% 总外力
F_total = g - D * v / norm(v);
% 控制输入 (PID控制器)
u = pid_controller(state);
% 平移动力学
dv = F_total / m + u(1:3);
% 旋转动力学
Ixx = 1000; Iyy = 2000; Izz = 3000; % 惯性矩 (kg*m^2)
I = diag([Ixx, Iyy, Izz]);
dw = inv(I) * (u(4:6) - cross(w, I * w));
% 四元数更新
dq = 0.5 * quat_multiply(q, [0; w]);
% 状态导数
dstate = [v; dv; dq; dw];
end
% PID控制器
function u = pid_controller(state)
% 示例:简单的比例控制
Kp = 1e-3; % 比例增益
Ki = 0; % 积分增益
Kd = 0; % 微分增益
error = [0; 0; 0]; % 假设目标误差为零
u = Kp * error; % 控制输入
end
% 四元数乘法
function q_out = quat_multiply(q1, q2)
qw1 = q1(1); qx1 = q1(2); qy1 = q1(3); qz1 = q1(4);
qw2 = q2(1); qx2 = q2(2); qy2 = q2(3); qz2 = q2(4);
q_out = [
qw1*qw2 - qx1*qx2 - qy1*qy2 - qz1*qz2;
qw1*qx2 + qx1*qw2 + qy1*qz2 - qz1*qy2;
qw1*qy2 - qx1*qz2 + qy1*qw2 + qz1*qx2;
qw1*qz2 + qx1*qy2 - qy1*qx2 + qz1*qw2
];
end
% 结果可视化
figure;
plot3(state(:,1), state(:,2), state(:,3));
xlabel('X (m)');
ylabel('Y (m)');
zlabel('Z (m)');
title('航天器轨迹');
grid on;
说明:
- 动力学模型:包含平移和旋转动力学。
- 气动力模型:使用简单的阻力公式,升力设为零。
- 引力模型:简化为球形引力场。
- 控制器:实现了一个简单的PID控制器(仅比例控制)。
- 四元数:用于描述航天器的姿态变化。
你可以根据实际需求扩展该模型,例如引入更精确的气动模型、复杂控制器或地球引力场模型。
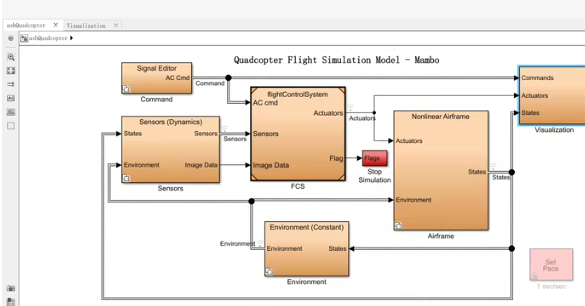
(Quadcopter)飞行仿真模型。这个模型包含了信号编辑器、传感器、环境、飞行控制系统(FCS)、非线性机身模型以及可视化模块等部分。下面是一个简化的MATLAB Simulink代码示例,用于模拟四旋翼飞行器的基本飞行动态。
Simulink Model Setup
首先,你需要在MATLAB中打开Simulink并创建一个新的模型文件。然后,你可以根据以下步骤和代码片段来构建你的四旋翼飞行器仿真模型。
1. 创建基本模型结构
在Simulink中,你可以通过拖拽不同的模块来构建你的模型。这里我们提供一个简化版的四旋翼飞行器模型的Simulink脚本,你可以将其保存为.m文件并在MATLAB中运行以生成Simulink模型。
% 创建一个新的Simulink模型
modelName = 'QuadcopterFlightSimulation';
new_system(modelName);
open_system(modelName);
% 添加必要的模块
add_block('simulink/Sources/Constant', [modelName '/Command']);
add_block('simulink/Sources/Signal Editor', [modelName '/Signal Editor']);
add_block('simulink/Ports & Subsystems/Inport', [modelName '/Commands']);
add_block('simulink/Ports & Subsystems/Outport', [modelName '/Actuators']);
add_block('simulink/Ports & Subsystems/Outport', [modelName '/States']);
add_block('simulink/Ports & Subsystems/Outport', [modelName '/Visualization']);
% 添加子系统
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/AC cmd']);
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/RightControlSystem']);
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/Nonlinear Airframe']);
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/Sensors (Dynamics)']);
add_block('simulink/Ports & Subsystems/Subsystem', [modelName '/Environment (Constant)']);
% 设置连接线
add_line(modelName, 'Command/1', 'AC cmd/1');
add_line(modelName, 'Signal Editor/1', 'AC cmd/2');
add_line(modelName, 'AC cmd/1', 'RightControlSystem/1');
add_line(modelName, 'RightControlSystem/1', 'Nonlinear Airframe/1');
add_line(modelName, 'Nonlinear Airframe/1', 'Actuators/1');
add_line(modelName, 'Nonlinear Airframe/2', 'States/1');
add_line(modelName, 'Nonlinear Airframe/3', 'Visualization/1');
% 打开模型查看
open_system(modelName);
2. 定义子系统功能
接下来,你需要定义每个子系统的具体功能。例如,RightControlSystem可以包含PID控制器,Nonlinear Airframe可以包含四旋翼的动力学方程等。
RightControlSystem 子系统
在这个子系统中,你可以添加PID控制器来控制四旋翼的姿态和位置。
% 在RightControlSystem子系统中添加PID控制器
open_system([modelName '/RightControlSystem']);
add_block('simulink/Continuous/PID Controller', [modelName '/RightControlSystem/PID']);
set_param([modelName '/RightControlSystem/PID'], 'P', '1', 'I', '0.1', 'D', '0.01');
Nonlinear Airframe 子系统
在这个子系统中,你可以定义四旋翼的动力学方程。
% 在Nonlinear Airframe子系统中添加动力学方程
open_system([modelName '/Nonlinear Airframe']);
add_block('simulink/User-Defined Functions/MATLAB Function', [modelName '/Nonlinear Airframe/Dynamics']);
set_param([modelName '/Nonlinear Airframe/Dynamics'], 'Script', 'function y = fcn(u)');
在MATLAB Function模块中,你可以编写具体的动力学方程代码。
3. 运行仿真
最后,你可以设置仿真参数并运行仿真。
% 设置仿真参数
set_param(modelName, 'StopTime', '100');
set_param(modelName, 'Solver', 'ode45');
% 运行仿真
sim(modelName);
以上代码只是一个基础框架,
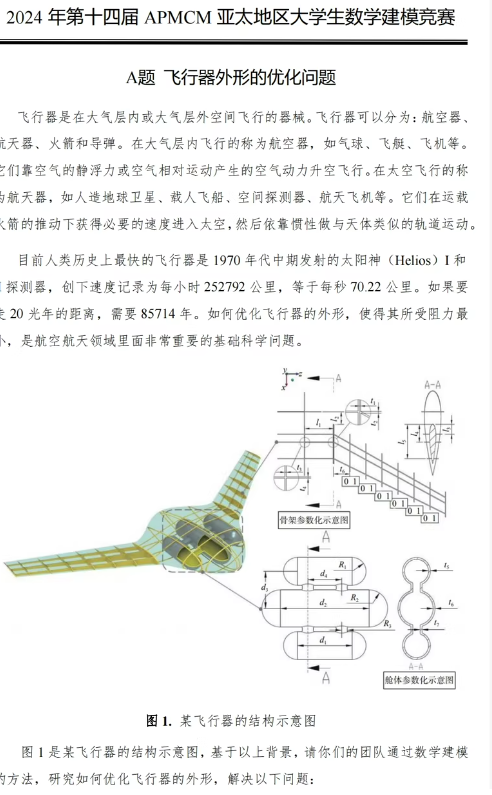
这是一个涉及流体力学、几何建模和优化算法的复杂问题。以下是一个基于MATLAB的简化示例代码,用于模拟和优化飞行器外形参数以减少空气阻力。
1. 定义飞行器外形参数
首先,我们需要定义飞行器的几何参数,并创建一个函数来计算这些参数对应的飞行器外形。
function [x, y] = generate_aircraft_shape(params)
% params: [L1, L2, R1, R2, d1, d2, t1, t2]
L1 = params(1);
L2 = params(2);
R1 = params(3);
R2 = params(4);
d1 = params(5);
d2 = params(6);
t1 = params(7);
t2 = params(8);
% Generate points for the aircraft shape
x = [-L1 -L1+R1 -L1+R1+d1 -L1+R1+d1+L2 -L1+R1+d1+L2+R2 -L1+R1+d1+L2+R2+d2];
y = [0 R1 R1+t1 R1+t1 R2+t2 R2+t2];
% Add symmetry for the lower part
x = [x fliplr(x)];
y = [y fliplr(-y)];
end
2. 计算空气阻力
接下来,我们需要一个函数来计算给定外形下的空气阻力。这里我们使用一个简化的公式来表示阻力与外形的关系。
function drag = calculate_drag(params)
% Calculate the drag based on the aircraft shape parameters
[x, y] = generate_aircraft_shape(params);
% Simplified drag calculation (example formula)
drag = sum(abs(diff(y))) * sum(abs(diff(x)));
end
3. 优化算法
我们可以使用MATLAB内置的优化工具箱中的fminsearch函数来寻找最优的飞行器外形参数。
% Initial guess for the parameters
initial_params = [1, 1, 0.5, 0.5, 0.2, 0.2, 0.1, 0.1];
% Perform optimization
optimized_params = fminsearch(@calculate_drag, initial_params);
% Display the optimized parameters
disp('Optimized Parameters:');
disp(optimized_params);
% Plot the optimized aircraft shape
[x_opt, y_opt] = generate_aircraft_shape(optimized_params);
plot(x_opt, y_opt);
axis equal;
title('Optimized Aircraft Shape');
xlabel('X');
ylabel('Y');
grid on;
4. 进一步改进
上述代码只是一个非常基础的示例,实际应用中可能需要考虑更多的因素,例如:
- 使用更精确的流体动力学模型(如CFD仿真)来计算阻力。
- 添加更多几何参数以更准确地描述飞行器外形。
- 考虑材料属性、重量分布等因素对飞行性能的影响。
- 使用更高级的优化算法(如遗传算法、粒子群优化等)来寻找全局最优解。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









