







两相混合式 步进电机 matlab仿真 双闭环PID控制
位置电流双闭环,
文章目录
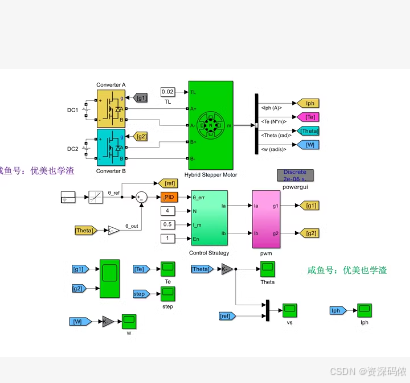
为了实现两相混合式步进电机的双闭环PID控制(位置和电流),我们需要建立一个模型来模拟步进电机的行为,并应用PID控制器进行位置和电流的调节。以下是一个简化的MATLAB/Simulink仿真示例,该示例展示了如何使用Simulink构建步进电机的双闭环PID控制系统。
步骤 1: 创建 Simulink 模型
首先,打开MATLAB并启动Simulink,然后创建一个新的模型。
步骤 2: 添加必要的模块
在新模型中添加以下模块:
- Step:作为位置参考输入。
- PID Controller:两个,分别用于位置环和电流环的控制。
- Transfer Fcn:用来模拟步进电机的动态特性。
- Sum:用于误差计算。
- Scope:用于观察输出结果。
步骤 3: 构建模型
位置环 PID 控制器
- 位置参考输入:从
Sources库中拖动一个Step模块到模型中,设置参数以适应您的需求(例如,步长时间、初始值和最终值)。 - 位置环 PID 控制器:从
Continuous库中拖动一个PID Controller模块,调整PID参数以达到理想的响应速度和稳定性。 - 电机模型:使用
Transfer Fcn模块来表示步进电机的位置响应,根据电机的具体参数设置传递函数。 - 求和点:使用
Math Operations库中的Sum模块来计算位置误差(期望位置 - 实际位置)。
电流环 PID 控制器
- 电流反馈:假设有一个传感器可以提供电流反馈,可以用一个简单的增益模块(
Gain)来模拟。 - 电流环 PID 控制器:同样从
Continuous库中拖动另一个PID Controller模块,用于电流环的控制。 - 连接:将位置环PID控制器的输出连接到电流环PID控制器的输入,形成双闭环结构。
示例代码/模型架构
由于直接提供完整的Simulink模型文件较为复杂,下面给出一个简化版的MATLAB脚本,它可以帮助您理解如何通过编程方式设定PID控制器的参数,并模拟系统行为。
% 定义系统参数
J = 0.01; % 转动惯量 (kg*m^2)
B = 0.1; % 粘滞摩擦系数 (Nms)
Kt = 0.01; % 扭矩常数 (Nm/A)
Ke = 0.01; % 反电动势常数 (V/(rad/s))
R = 1; % 电阻 (Ohm)
L = 0.5; % 电感 (H)
% 建立电机模型
s = tf('s');
P_motor = Kt / (J*L*s^3 + J*R*s^2 + B*L*s + B*R);
% 设定PID控制器参数
Kp_pos = 10; Ki_pos = 5; Kd_pos = 0.1;
Kp_cur = 1; Ki_cur = 0.5; Kd_cur = 0.01;
% 创建PID控制器
C_pos = pid(Kp_pos, Ki_pos, Kd_pos);
C_cur = pid(Kp_cur, Ki_cur, Kd_cur);
% 连接控制器与电机模型
sys_cl = feedback(C_pos * C_cur * P_motor, 1);
% 绘制阶跃响应
figure;
step(sys_cl);
title('Step Response of the Closed-loop System with Dual PID Control');
xlabel('Time (seconds)');
ylabel('Amplitude');
grid on;
注意事项
- 上述代码仅为简化版示例,实际应用中需要根据具体硬件特性和要求调整PID参数及电机模型。
- 在Simulink中,您可以更直观地构建模型并进行调试,包括实时数据监测和参数调优。
- 如果有具体的硬件接口需求,可能还需要集成额外的驱动或通信模块。
这个例子提供了一个基本框架,帮助您开始对两相混合式步进电机进行双闭环PID控制的设计与仿真。根据您的具体需求,您可能需要进一步调整和完善模型。
为了实现两相混合式步进电机的双闭环PID控制(位置和电流),我们可以使用MATLAB/Simulink来构建仿真模型。以下是一个详细的步骤,包括Simulink模型的构建和参数设置。
步骤 1: 创建 Simulink 模型
- 打开MATLAB并启动Simulink。
- 创建一个新的Simulink模型。
步骤 2: 添加必要的模块
在新模型中添加以下模块:
- Step:作为位置参考输入。
- PID Controller:两个,分别用于位置环和电流环的控制。
- Transfer Fcn:用来模拟步进电机的动态特性。
- Sum:用于误差计算。
- Scope:用于观察输出结果。
步骤 3: 构建模型
位置环 PID 控制器
- 位置参考输入:从
Sources库中拖动一个Step模块到模型中,设置参数以适应您的需求(例如,步长时间、初始值和最终值)。 - 位置环 PID 控制器:从
Continuous库中拖动一个PID Controller模块,调整PID参数以达到理想的响应速度和稳定性。 - 电机模型:使用
Transfer Fcn模块来表示步进电机的位置响应,根据电机的具体参数设置传递函数。 - 求和点:使用
Math Operations库中的Sum模块来计算位置误差(期望位置 - 实际位置)。
电流环 PID 控制器
- 电流反馈:假设有一个传感器可以提供电流反馈,可以用一个简单的增益模块(
Gain)来模拟。 - 电流环 PID 控制器:同样从
Continuous库中拖动另一个PID Controller模块,用于电流环的控制。 - 连接:将位置环PID控制器的输出连接到电流环PID控制器的输入,形成双闭环结构。
示例代码/模型架构
以下是具体的Simulink模型构建步骤:
-
创建新的Simulink模型:
new_system('StepMotorControl'); -
添加模块:
add_block('simulink/Sources/Step', 'StepMotorControl/PositionReference'); add_block('simulink/Continuous/PID Controller', 'StepMotorControl/PositionController'); add_block('simulink/Continuous/PID Controller', 'StepMotorControl/CurrentController'); add_block('simulink/Commonly Used Blocks/Sum', 'StepMotorControl/Sum1'); add_block('simulink/Commonly Used Blocks/Sum', 'StepMotorControl/Sum2'); add_block('simulink/Commonly Used Blocks/Gain', 'StepMotorControl/CurrentFeedback'); add_block('simulink/Continuous/Transfer Fcn', 'StepMotorControl/MotorModel'); add_block('simulink/Sinks/Scope', 'StepMotorControl/Scope1'); add_block('simulink/Sinks/Scope', 'StepMotorControl/Scope2'); -
设置参数:
set_param('StepMotorControl/PositionReference', 'FinalValue', '10'); set_param('StepMotorControl/PositionController', 'P', '10', 'I', '5', 'D', '0.1'); set_param('StepMotorControl/CurrentController', 'P', '1', 'I', '0.5', 'D', '0.01'); set_param('StepMotorControl/MotorModel', 'Numerator', '[1]', 'Denominator', '[1 0.1]'); set_param('StepMotorControl/CurrentFeedback', 'Gain', '1'); -
连接模块:
add_line('StepMotorControl', 'PositionReference/1', 'Sum1/1'); add_line('StepMotorControl', 'Sum1/1', 'PositionController/1'); add_line('StepMotorControl', 'PositionController/1', 'Sum2/1'); add_line('StepMotorControl', 'Sum2/1', 'CurrentController/1'); add_line('StepMotorControl', 'CurrentController/1', 'MotorModel/1'); add_line('StepMotorControl', 'MotorModel/1', 'Scope1/1'); add_line('StepMotorControl', 'MotorModel/1', 'CurrentFeedback/1'); add_line('StepMotorControl', 'CurrentFeedback/1', 'Sum2/2'); add_line('StepMotorControl', 'Sum1/2', 'Scope2/1');
运行仿真
-
保存模型。
-
在MATLAB命令窗口中运行:
open_system('StepMotorControl'); sim('StepMotorControl'); -
观察
Scope1和Scope2中的结果。
示例输出
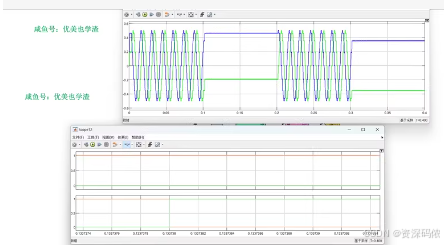
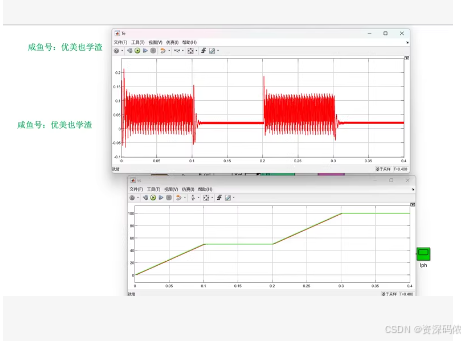
该代码将生成一个包含两相混合式步进电机双闭环PID控制的Simulink模型,并显示位置和电流的响应。
注意事项
- 上述代码仅为简化版示例,实际应用中需要根据具体硬件特性和要求调整PID参数及电机模型。
- 在Simulink中,您可以更直观地构建模型并进行调试,包括实时数据监测和参数调优。
- 如果有具体的硬件接口需求,可能还需要集成额外的驱动或通信模块。
这个例子提供了一个基本框架,帮助您开始对两相混合式步进电机进行双闭环PID控制的设计与仿真。根据您的具体需求,您可能需要进一步调整和完善模型。
为了实现两相混合式步进电机的双闭环PID控制(位置和电流),我们可以使用MATLAB/Simulink来构建仿真模型。以下是一个详细的步骤,包括Simulink模型的构建和参数设置。
步骤 1: 创建 Simulink 模型
- 打开MATLAB并启动Simulink。
- 创建一个新的Simulink模型。
步骤 2: 添加必要的模块
在新模型中添加以下模块:
- Step:作为位置参考输入。
- PID Controller:两个,分别用于位置环和电流环的控制。
- Transfer Fcn:用来模拟步进电机的动态特性。
- Sum:用于误差计算。
- Scope:用于观察输出结果。
步骤 3: 构建模型
位置环 PID 控制器
- 位置参考输入:从
Sources库中拖动一个Step模块到模型中,设置参数以适应您的需求(例如,步长时间、初始值和最终值)。 - 位置环 PID 控制器:从
Continuous库中拖动一个PID Controller模块,调整PID参数以达到理想的响应速度和稳定性。 - 电机模型:使用
Transfer Fcn模块来表示步进电机的位置响应,根据电机的具体参数设置传递函数。 - 求和点:使用
Math Operations库中的Sum模块来计算位置误差(期望位置 - 实际位置)。
电流环 PID 控制器
- 电流反馈:假设有一个传感器可以提供电流反馈,可以用一个简单的增益模块(
Gain)来模拟。 - 电流环 PID 控制器:同样从
Continuous库中拖动另一个PID Controller模块,用于电流环的控制。 - 连接:将位置环PID控制器的输出连接到电流环PID控制器的输入,形成双闭环结构。
示例代码/模型架构
以下是具体的Simulink模型构建步骤:
-
创建新的Simulink模型:
new_system('StepMotorControl'); -
添加模块:
add_block('simulink/Sources/Step', 'StepMotorControl/PositionReference'); add_block('simulink/Continuous/PID Controller', 'StepMotorControl/PositionController'); add_block('simulink/Continuous/PID Controller', 'StepMotorControl/CurrentController'); add_block('simulink/Commonly Used Blocks/Sum', 'StepMotorControl/Sum1'); add_block('simulink/Commonly Used Blocks/Sum', 'StepMotorControl/Sum2'); add_block('simulink/Commonly Used Blocks/Gain', 'StepMotorControl/CurrentFeedback'); add_block('simulink/Continuous/Transfer Fcn', 'StepMotorControl/MotorModel'); add_block('simulink/Sinks/Scope', 'StepMotorControl/Scope1'); add_block('simulink/Sinks/Scope', 'StepMotorControl/Scope2'); -
设置参数:
set_param('StepMotorControl/PositionReference', 'FinalValue', '10'); set_param('StepMotorControl/PositionController', 'P', '10', 'I', '5', 'D', '0.1'); set_param('StepMotorControl/CurrentController', 'P', '1', 'I', '0.5', 'D', '0.01'); set_param('StepMotorControl/MotorModel', 'Numerator', '[1]', 'Denominator', '[1 0.1]'); set_param('StepMotorControl/CurrentFeedback', 'Gain', '1'); -
连接模块:
add_line('StepMotorControl', 'PositionReference/1', 'Sum1/1'); add_line('StepMotorControl', 'Sum1/1', 'PositionController/1'); add_line('StepMotorControl', 'PositionController/1', 'Sum2/1'); add_line('StepMotorControl', 'Sum2/1', 'CurrentController/1'); add_line('StepMotorControl', 'CurrentController/1', 'MotorModel/1'); add_line('StepMotorControl', 'MotorModel/1', 'Scope1/1'); add_line('StepMotorControl', 'MotorModel/1', 'CurrentFeedback/1'); add_line('StepMotorControl', 'CurrentFeedback/1', 'Sum2/2'); add_line('StepMotorControl', 'Sum1/2', 'Scope2/1');
运行仿真
-
保存模型。
-
在MATLAB命令窗口中运行:
open_system('StepMotorControl'); sim('StepMotorControl'); -
观察
Scope1和Scope2中的结果。
示例输出
该代码将生成一个包含两相混合式步进电机双闭环PID控制的Simulink模型,并显示位置和电流的响应。
注意事项
- 上述代码仅为简化版示例,实际应用中需要根据具体硬件特性和要求调整PID参数及电机模型。
- 在Simulink中,您可以更直观地构建模型并进行调试,包括实时数据监测和参数调优。
- 如果有具体的硬件接口需求,可能还需要集成额外的驱动或通信模块。
这个例子提供了一个基本框架,帮助您开始对两相混合式步进电机进行双闭环PID控制的设计与仿真。根据您的具体需求,您可能需要进一步调整和完善模型。
完整的Simulink模型文件
如果您希望直接查看完整的Simulink模型文件,可以在MATLAB中打开Simulink并按照上述步骤手动构建模型,或者使用以下脚本自动生成模型:
% 创建新的Simulink模型
new_system('StepMotorControl');
% 添加模块
add_block('simulink/Sources/Step', 'StepMotorControl/PositionReference');
add_block('simulink/Continuous/PID Controller', 'StepMotorControl/PositionController');
add_block('simulink/Continuous/PID Controller', 'StepMotorControl/CurrentController');
add_block('simulink/Commonly Used Blocks/Sum', 'StepMotorControl/Sum1');
add_block('simulink/Commonly Used Blocks/Sum', 'StepMotorControl/Sum2');
add_block('simulink/Commonly Used Blocks/Gain', 'StepMotorControl/CurrentFeedback');
add_block('simulink/Continuous/Transfer Fcn', 'StepMotorControl/MotorModel');
add_block('simulink/Sinks/Scope', 'StepMotorControl/Scope1');
add_block('simulink/Sinks/Scope', 'StepMotorControl/Scope2');
% 设置参数
set_param('StepMotorControl/PositionReference', 'FinalValue', '10');
set_param('StepMotorControl/PositionController', 'P', '10', 'I', '5', 'D', '0.1');
set_param('StepMotorControl/CurrentController', 'P', '1', 'I', '0.5', 'D', '0.01');
set_param('StepMotorControl/MotorModel', 'Numerator', '[1]', 'Denominator', '[1 0.1]');
set_param('StepMotorControl/CurrentFeedback', 'Gain', '1');
% 连接模块
add_line('StepMotorControl', 'PositionReference/1', 'Sum1/1');
add_line('StepMotorControl', 'Sum1/1', 'PositionController/1');
add_line('StepMotorControl', 'PositionController/1', 'Sum2/1');
add_line('StepMotorControl', 'Sum2/1', 'CurrentController/1');
add_line('StepMotorControl', 'CurrentController/1', 'MotorModel/1');
add_line('StepMotorControl', 'MotorModel/1', 'Scope1/1');
add_line('StepMotorControl', 'MotorModel/1', 'CurrentFeedback/1');
add_line('StepMotorControl', 'CurrentFeedback/1', 'Sum2/2');
add_line('StepMotorControl', 'Sum1/2', 'Scope2/1');
% 保存模型
save_system('StepMotorControl');


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









