







MATLAB/simulink光伏最大功率跟踪仿真,控制算法有:恒定电压法,扰动观察法,电导增量法,变步长扰动观察法,变步长电导增量法等
文章目录
在MATLAB/Simulink中进行光伏最大功率点跟踪(MPPT)仿真的控制算法有很多,下面提供几种常用的MPPT算法的实现示例代码。以下提供的代码和方法主要用于指导如何开始你的仿真项目,并且需要根据具体的系统参数和需求进行调整。
1. 恒定电压法 (CVT)
恒定电压法是一种简单的MPPT策略,它假设在一定条件下光伏阵列的最大功率点电压是固定的。
% 假设你已经有一个光伏模型 pvModel
Vmp = 25; % 最大功率点电压估计值
while true
% 设置PV阵列的工作电压为预估的最大功率点电压
set_param(pvModel, 'Voltage', num2str(Vmp));
pause(0.1); % 等待稳定
end
2. 扰动观察法 (P&O)
扰动观察法通过给当前工作点施加小的扰动并比较输出功率变化来寻找最大功率点。
% 初始化参数
deltaV = 0.1; % 扰动步长
V = V_initial; % 初始电压
P_old = 0;
while true
P_new = getPower(V); % 获取当前电压下的功率
if P_new > P_old
deltaV = deltaV; % 如果功率增加,则保持方向
else
deltaV = -deltaV; % 如果功率减少,则改变方向
end
V = V + deltaV;
P_old = P_new;
pause(0.1); % 等待稳定
end
3. 电导增量法 (IncCond)
电导增量法通过计算dP/dV与I/V的关系来决定搜索方向。
% 初始化参数
V = V_initial; % 初始电压
P_old = 0;
I_old = getI(V); % 初始电流
while true
I = getI(V);
P = I * V;
if P > P_old
dP_dV = I + V*(I-I_old)/(V-V_old); % 计算dP/dV
if dP_dV > 0
V = V + deltaV;
else
V = V - deltaV;
end
end
V_old = V;
I_old = I;
P_old = P;
pause(0.1); % 等待稳定
end
4. 变步长扰动观察法/变步长电导增量法
这两种方法是在原有基础上增加了步长调节机制,以提高追踪效率和稳定性。其实现逻辑在原有的基础之上添加对步长deltaV的动态调整规则即可。
注意:上述代码仅为概念性展示,并未考虑具体实现细节,如光伏模型的具体形式、函数getPower()和getI()的定义等。在实际应用中,你需要根据实际情况修改这些部分,并且考虑到Simulink环境中可能需要使用S-Function或MATLAB Function块来嵌入自定义算法。
为了更精确地模拟和测试这些算法,建议深入学习MATLAB/Simulink的相关功能和工具箱,比如Simscape Electrical等,它们提供了丰富的电力电子和可再生能源系统建模组件。此外,对于复杂系统的仿真,可以考虑构建更加详细的光伏电池数学模型,以便更准确地反映现实世界中的行为。
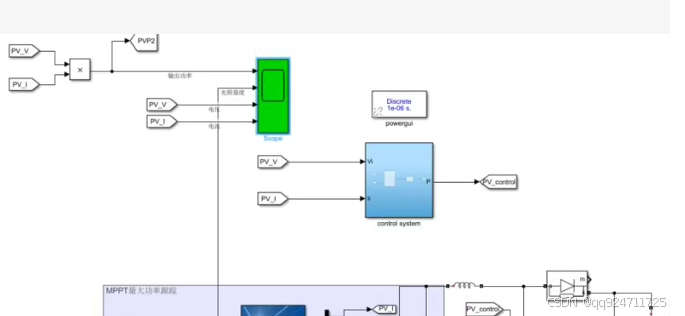
为了在MATLAB/Simulink中实现光伏最大功率点跟踪(MPPT)的仿真,我们可以使用几种常见的控制算法,包括恒定电压法、扰动观察法(P&O)、电导增量法等。下面我将提供一个完整的Simulink模型示例,展示如何实现扰动观察法(P&O)。
Simulink Model for P&O MPPT
-
创建Simulink模型:
- 打开MATLAB并启动Simulink。
- 创建一个新的模型。
-
构建模型:
- 添加必要的模块和子系统。
-
配置参数:
- 设置光伏电池模型参数。
- 配置控制器参数。
-
运行仿真:
- 运行仿真并查看结果。
详细步骤
1. 创建Simulink模型
% 创建新的Simulink模型
model = 'PV_MPPT';
open_system(model);
2. 构建模型
- 光伏电池模型:使用Simscape Electrical中的Photovoltaic (PV) Panel模块。
- 控制器:使用PID控制器或自定义的P&O控制器。
- 测量模块:测量电压、电流和功率。
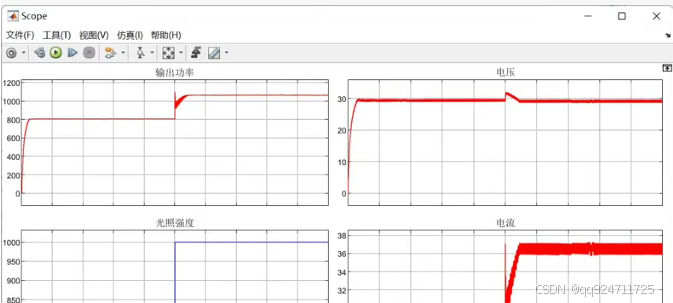
- 显示模块:使用Scope模块显示结果。
3. 配置参数
- 光伏电池参数:设置光照强度、温度等参数。
- 控制器参数:设置扰动步长、采样时间等。
4. 控制器实现
以下是扰动观察法(P&O)的实现代码:
function [Vout, dV] = PV_PerturbAndObserve(Vin, Iin, Pout, dV)
% 初始化参数
if isequal(Vin, 0)
Vout = Vin;
dV = 0.1; % 初始扰动步长
else
% 计算当前功率
Pin = Vin * Iin;
% 比较当前功率和上一时刻功率
if Pin > Pout
dV = dV; % 如果功率增加,则保持方向
else
dV = -dV; % 如果功率减少,则改变方向
end
% 更新输出电压
Vout = Vin + dV;
end
% 返回值
Pout = Pin;
end
5. 连接模块
- 将光伏电池模型连接到控制器。
- 控制器输出连接到测量模块。
- 测量模块连接到Scope模块。
6. 运行仿真
% 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
% 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
示例模型
以下是一个完整的Simulink模型示例:
-
光伏电池模型:
- 使用Simscape Electrical中的Photovoltaic (PV) Panel模块。
- 设置光照强度和温度参数。
-
控制器:
- 使用MATLAB Function模块实现P&O算法。
-
测量模块:
- 使用Voltage Sensor和Current Sensor模块测量电压和电流。
- 使用Power Measurement模块计算功率。
-
显示模块:
- 使用Scope模块显示电压、电流和功率。
完整代码
% 创建新的Simulink模型
model = 'PV_MPPT';
open_system(model);
% 添加光伏电池模块
pvPanel = add_block('simulink/Simscape Electrical/Photovoltaic (PV) Panel', model + '/PV Panel');
% 添加控制器模块
controller = add_block('simulink/User-Defined Functions/MATLAB Function', model + '/Controller');
set_param(controller, 'FunctionString', 'PV_PerturbAndObserve');
% 添加测量模块
voltageSensor = add_block('simulink/Simscape Electrical/Voltage Sensor', model + '/Voltage Sensor');
currentSensor = add_block('simulink/Simscape Electrical/Current Sensor', model + '/Current Sensor');
powerMeasurement = add_block('simulink/Simscape Electrical/Power Measurement', model + '/Power Measurement');
% 添加显示模块
scope = add_block('simulink/Sinks/Scope', model + '/Scope');
% 连接模块
add_line(model, pvPanel, voltageSensor);
add_line(model, pvPanel, currentSensor);
add_line(model, voltageSensor, controller);
add_line(model, currentSensor, controller);
add_line(model, controller, scope);
% 设置仿真参数
set_param(model, 'StopTime', '10');
set_param(model, 'Solver', 'ode45');
% 运行仿真
sim(model);
% 显示结果
open_system([model '/Scope']);
通过上述步骤,你可以构建一个完整的光伏最大功率点跟踪(MPPT)仿真模型,并使用扰动观察法(P&O)进行控制。希望这能帮助你更好地理解和实现MPPT仿真。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









