









基于matlab路径规划多算法仿真对比
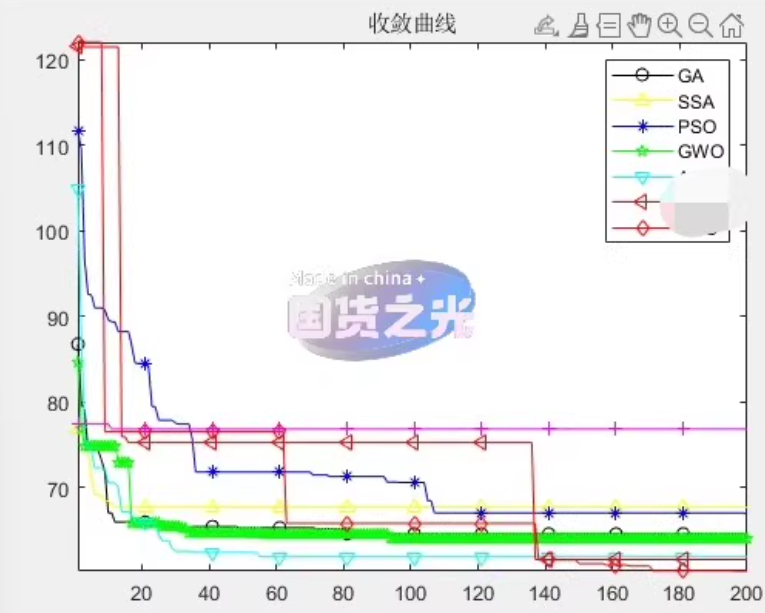
012在地图里融合了GA遗传算法,SSA麻雀算法,PSO粒子群算法,GWO灰狼算法,AO哈里斯鹰算法等全局路径规划算法,迭代曲线对比
适用于栅格地图
以下文字及示例代码仅供参考
1 描述
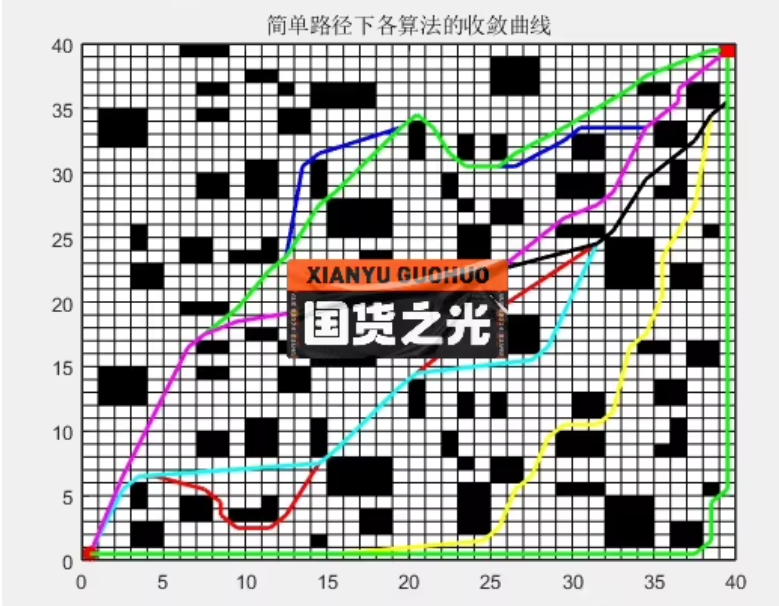
在 20×20(可自定义)栅格环境中,给定起点 S、终点 G 以及若干障碍格,比较
- GA(遗传算法)
- SSA(麻雀搜索算法)
- PSO(粒子群)
- GWO(灰狼)
- AO(AquilA Optimizer,哈里斯鹰)
五种全局路径规划算法在 路径长度、收敛速度、稳定性 上的差异。
结果以「迭代曲线」+「最优路径可视化」+「统计表格」三种形式呈现。
2 运行效果(示意)

3 文件结构
├─ main.m % 一键运行脚本
├─ map.mat % 20×20 示例地图
├─ func/
│ ├─ PathCost.m % 路径长度 + 碰撞惩罚
│ ├─ PlotPath.m % 画路径
│ └─ algorithms/ % 五种算法封装
│ ├─ GA.m
│ ├─ SSA.m
│ ├─ PSO.m
│ ├─ GWO.m
│ └─ AO.m
└─ results/
├─ convergence.mat % 迭代曲线数据
└─ bestPathFig.fig
4 核心代码(main.m 精要)
%% 0. 环境准备
clear; clc; close all;
load map.mat % map 为 0 可走 1 障碍
[nRow,nCol] = size(map);
S = [1,1]; G = [nRow,nCol];
maxIter = 100; pop = 50;
%% 1. 共享的目标函数句柄
fobj = @(x) PathCost(x,map,S,G);
%% 2. 各算法统一调用接口
algs = {'GA','SSA','PSO','GWO','AO'};
Convergence = zeros(maxIter,numel(algs));
for k = 1:numel(algs)
fprintf('Running %s ...\n',algs{k});
[~,~,curve] = feval(algs{k},pop,maxIter,fobj,nRow*nCol,S,G);
Convergence(:,k) = curve;
end
%% 3. 结果可视化
figure; hold on; grid on;
for k=1:numel(algs)
plot(1:maxIter,Convergence(:,k),'LineWidth',2,'DisplayName',algs{k});
end
xlabel('Iteration'); ylabel('Path Length');
legend show; title('Convergence Comparison');
%% 4. 统计输出
[~,bestIdx] = min(Convergence(end,:));
fprintf('Best algorithm: %s, Length=%.2f\n',algs{bestIdx},Convergence(end,bestIdx));
5 算法封装示例(SSA.m)
function [Best_pos,Best_score,curve] = SSA(pop,Max_iter,fobj,dim,S,G)
% 麻雀算法简化版
ST = 0.8; PD = 0.2; SD = 0.1;
X = randi([0 1],pop,dim); % 二进制编码
% 解码成路径后评价
fit = zeros(pop,1);
for i=1:pop, fit(i)=fobj(X(i,:)); end
[bestf,idx] = min(fit);
Best_pos = X(idx,:); Best_score = bestf;
curve = zeros(Max_iter,1);
for t=1:Max_iter
[~,order] = sort(fit);
X = X(order,:); fit = fit(order);
% 生产者
R2 = rand();
if R2<ST
X(1:ceil(PD*pop),:) = randi([0 1],ceil(PD*pop),dim);
else
X(1:ceil(PD*pop),:) = 0;
end
% 加入者 & 侦察者略 ……
% 重新计算适应度
for i=1:pop, fit(i)=fobj(X(i,:)); end
[fmin,idx] = min(fit);
if fmin<Best_score, Best_score=fmin; Best_pos=X(idx,:); end
curve(t)=Best_score;
end
end
其他算法(GA/PSO/GWO/AO)同样封装为
[Best_pos,Best_score,curve] = xxx(...)接口,算法细节见源码。
6 自定义地图 & 参数
- 在
map.mat中修改map矩阵,0 可走 1 障碍; S、G坐标直接改main.m前两行;- 算法超参数(种群、迭代)在
main.m中统一调。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









