







 超级会员免费看
超级会员免费看
一、数字图像处理基础
1.1 图像数字化原理
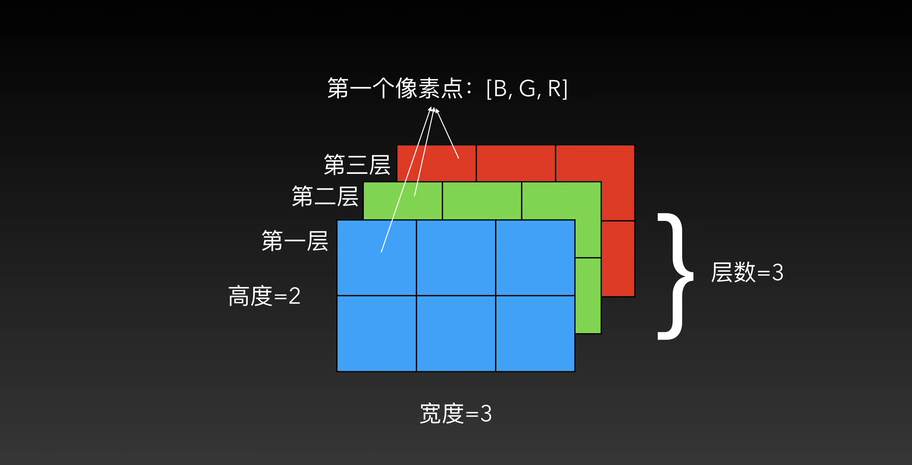
数字图像本质上是二维离散信号,由按矩阵排列的像素点构成。每个像素点的数值代表特定位置的亮度或色彩信息...
1.2 OpenCV核心数据结构
import cv2
import numpy as np
# 读取图像文件
img = cv2.imread('image.jpg')
# 获取图像属性
print(f"图像尺寸:{img.shape}")
print(f"数据类型:{img.dtype}")
print(f"总像素数:{img.size}")二、图像基础操作实践
2.1 图像输入输出
# 读取图像(支持JPG/PNG/BMP等格式)
img = cv2.imread('input.jpg', cv2.IMREAD_COLOR)
# 保存处理结果
cv2.imwrite('output.png', img)
# 图像显示
cv2.imshow('Preview', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









