



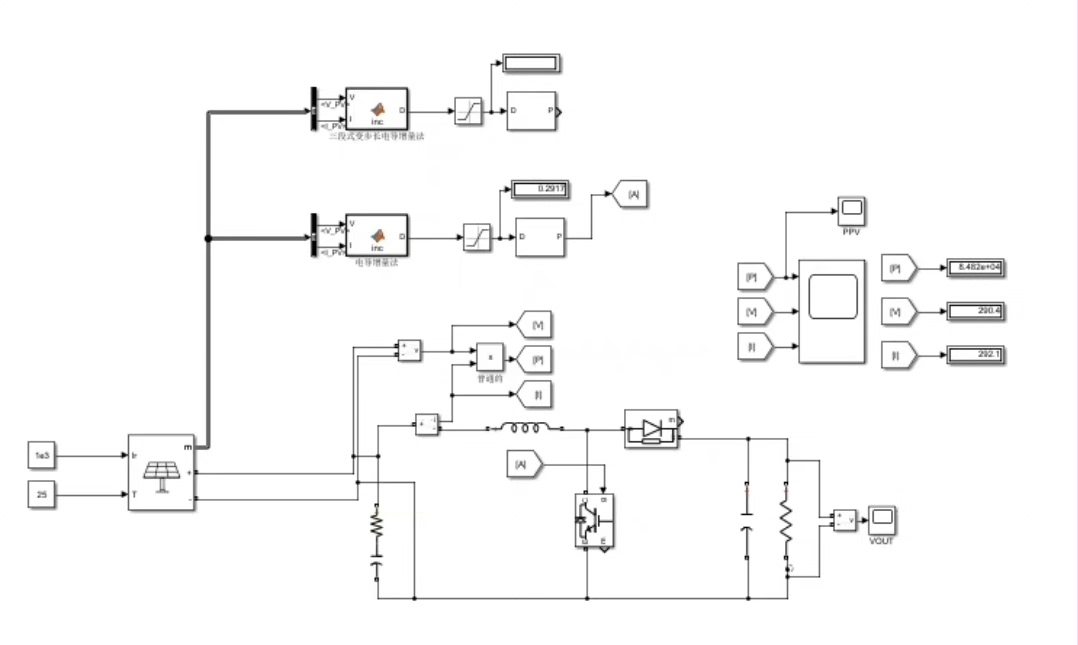
光伏mppt,最大功率点跟踪, 变步长电导增量法,包括变步长电导增量和电导增量两种 模型采用三段式寻优控制变步长电导增量,跟踪效果良好 提供对应的word设计报告 文件版本有matlab22a和18b两种
在光伏系统中,最大功率点跟踪(MPPT)技术至关重要,它能让光伏电池始终工作在最大功率点附近,提升发电效率。今天咱就来唠唠其中的变步长电导增量法,这可是个优化MPPT性能的好法子。
电导增量法基础
电导增量法的核心依据是光伏电池的功率 - 电压曲线特性。大家都知道,光伏电池的输出功率$P$和输出电压$V$之间的关系是一条非线性曲线,存在一个最大功率点。电导增量法就是通过比较功率对电压的微分$\frac{dP}{dV}$与当前电导$G = \frac{I}{V}$ ($I$是电流)的增量$\frac{dG}{dV}$ 来判断工作点与最大功率点的相对位置。
假设光伏电池的输出功率$P = VI$,对$P$关于$V$求导可得:$\frac{dP}{dV} = I + V\frac{dI}{dV}$ 。当 $\frac{dP}{dV} = 0$时,就达到最大功率点。
用代码简单示意一下基础电导增量法的判断逻辑(以Python为例):
# 假设已经获取到当前电压V,电流I,以及电流对电压的微分项dI_dV
V = 10.0
I = 2.0
dI_dV = -0.1
dP_dV = I + V * dI_dV
G = I / V
dG_dV = dI_dV / V - I / (V ** 2)
if dP_dV > 0:
if dG_dV > 0:
print("向电压增大方向调整工作点")
else:
print("向电压减小方向调整工作点")
else:
if dG_dV > 0:
print("向电压减小方向调整工作点")
else:
print("向电压增大方向调整工作点")在这段代码里,先计算出$\frac{dP}{dV}$和$\frac{dG}{dV}$ ,然后依据它们的正负来判断该朝哪个方向调整光伏电池的工作点,以便靠近最大功率点。
变步长电导增量法
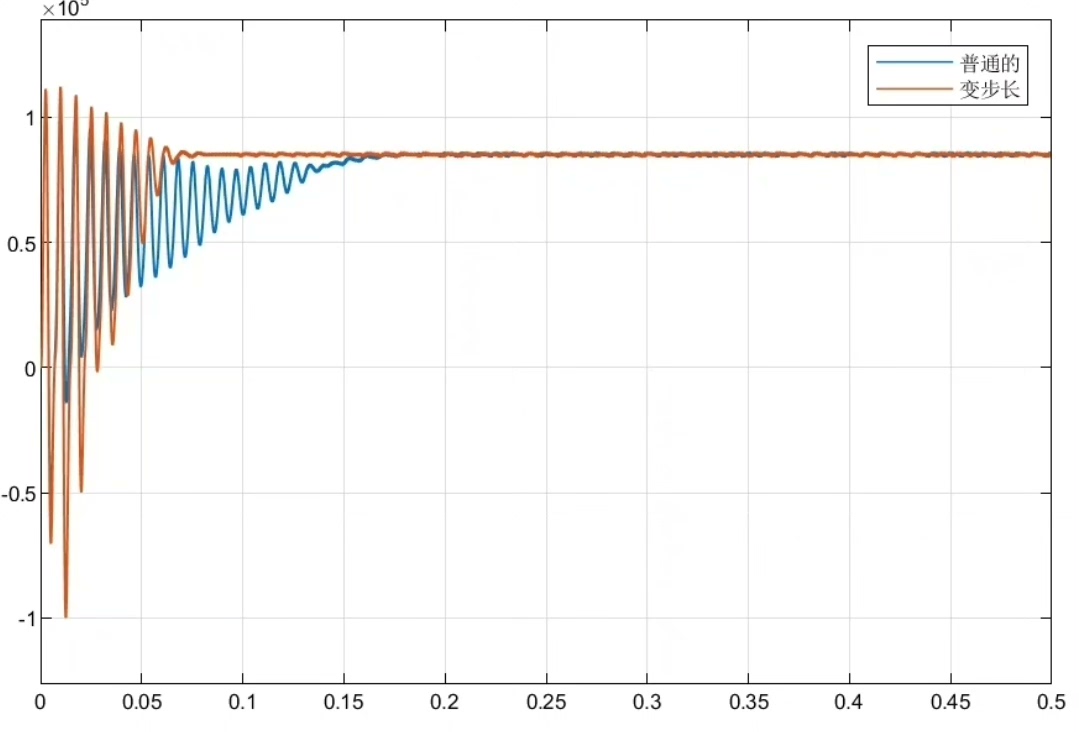
传统的电导增量法在跟踪速度和精度之间存在一定矛盾。固定步长下,大步长跟踪速度快,但容易在最大功率点附近振荡,降低精度;小步长虽然精度高,但跟踪速度慢。变步长电导增量法就很好地解决了这个问题。
它采用三段式寻优控制。在远离最大功率点时,采用大步长快速接近;靠近最大功率点时,逐渐减小步长,提高跟踪精度;在最大功率点附近,采用极小步长,减少振荡。
下面用Matlab代码展示一下变步长电导增量法的大致实现(以Matlab 2022a版本为例,Matlab 2018b版本代码基本一致,部分函数可能存在兼容性差异):
% 初始化参数
V = 0; % 初始电压
I = 0; % 初始电流
step_size1 = 0.5; % 大步长
step_size2 = 0.1; % 中步长
step_size3 = 0.01; % 小步长
P_old = 0;
while true
P = V * I;
dP = P - P_old;
dV = V - V_old;
G = I / V;
dG = (I - I_old) / V - I / (V * V) * dV;
if abs(dP / dV) > 0.5 % 远离最大功率点
V = V + step_size1 * sign(dP / dV);
elseif abs(dP / dV) > 0.1 % 靠近最大功率点
V = V + step_size2 * sign(dP / dV);
else % 最大功率点附近
V = V + step_size3 * sign(dP / dV);
end
% 更新电流、旧功率和旧电压
I = get_current(V); % 假设这个函数能根据电压获取当前电流
P_old = P;
V_old = V;
% 判断是否满足停止条件,这里简单假设功率变化小于某个阈值就停止
if abs(dP) < 0.01
break;
end
end在这段Matlab代码里,通过判断 $\frac{dP}{dV}$ 的大小来决定采用哪种步长调整电压$V$ 。远离最大功率点时,$\frac{dP}{dV}$绝对值较大,使用大步长$step\size1$快速调整;随着逐渐靠近最大功率点,$\frac{dP}{dV}$绝对值变小,改用中步长$step\size2$ ;在最大功率点附近,$\frac{dP}{dV}$接近0,采用小步长$step\_size3$ ,有效减少振荡,提高跟踪精度。
跟踪效果
实际应用中,变步长电导增量法的跟踪效果相当不错。相比传统固定步长的电导增量法,它能更快地跟踪到最大功率点,并且在最大功率点附近的振荡明显减小。无论是光照强度快速变化,还是温度等环境因素波动,三段式寻优控制的变步长电导增量法都能展现出良好的适应性,让光伏系统稳定高效地运行。
对应的Word设计报告与文件版本
如果大家想要深入了解变步长电导增量法的设计细节、理论分析以及完整的系统架构等内容,可以参考对应的Word设计报告。目前该报告有Matlab 2022a和2018b两种文件版本。Matlab 2022a版本在代码函数调用和绘图等方面可能会有一些新特性,而2018b版本则更适合一些配置稍旧的环境。大家可以根据自己的实际情况选择相应版本的文件进行参考和学习。
希望通过这篇博文,能让大家对光伏MPPT中的变步长电导增量法有更清晰的认识和理解,在实际项目中更好地应用这一技术。

















 1378
1378

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









