







一、下载Sophus库
Sophus库是在Eigen的基础上进行开发的,分为模板/非模板类版本两种,SLAM14讲开源代码使用的为非模板类
1.获取(非模板)方式
目录:slam14/slambook2/3rdparty 下 有 Sophus.tar.gz 解压
// 在上面基础
cd Sophus
mkdir build
cd build
cmake ..
make
会出现以下ERROR:
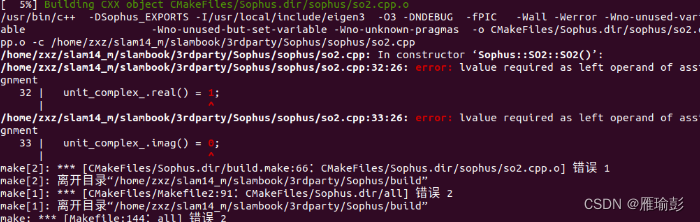
错误解决:
中文翻译:错误:左值需要作为赋值的左操作数 例如: 3=b
将so2.cpp中 33 lines 改为:
SO2::SO2()
{
unit_complex_.real(1);
unit_complex_.imag(0);
}
2.获取(模板)方式
git clone https://github.com/strasdat/Sophus # 模板Sophus库
二、实践Sophus
mian.cpp
#include <iostream>
#include <cmath>
// 创建矩阵(矩阵的表达)
#include <Eigen/Core>
// 矩阵的几何运算(旋转向量、欧拉角、四元数等)
#include <Eigen/Geometry>
#include "sophus/so3.h"
#include "sophus/se3.h"
using namespace std;
int main(int argc,char* argv[]) {
// Z轴旋转90度的旋转向量
Eigen::AngleAxisd rotation_vector(M_PI/2,Eigen::Vector3d(0,0,1));
// 将沿着Z轴旋转90度的旋转向量转换为旋转矩阵
Eigen::Matrix3d R = rotation_vector.toRotationMatrix();
/******************** 区块1 **********************/
// 通过SO3类的构造函数,将旋转矩阵赋值给特殊正交群(SO3李群)---SO(3)实际是旋转矩阵R的集合
// 函数原型:SO3::SO3(const Matrix3d & _R);
Sophus::SO3 SO3_R(R);
// 也可以通过旋转向量进行构造
// 函数原型:SO3::SO3(double rot_x,double rot_y,double rot_z);
// 沿着Z轴旋转90的旋转向量赋值为 李群SO3
Sophus::SO3 SO3_V(0,0,M_PI/2);
// 四元数 旋转矩阵转四元数
Eigen::Quaterniond q(R);
// 通过四元数对李群SO3进行构造
Sophus::SO3 SO3_q(q);
/******************** 区块1 的表达式均等价 **********************/
/******** 区块2 输出SO(3)时,以so(3) 李代数(定义在R3三维向量空间上的三维向量) 形式输出 *******/
// 也可以通过 SO3_R.matrix() SO3_V.matrix() SO3_q.matrix() 将李群以三阶矩阵的形式输出
cout << "SO(3) from matrix: \n" << SO3_R << endl;
cout << "SO(3) from vector: \n" << SO3_V << endl;
cout << "SO(3) from quaternion: \n" << SO3_q <<endl;
/******** 区块2 ******************/
/********* 区块3 ************/
// 使用对数映射获得其李代数(定义在R3三维向量空间上的三维向量)
// 李代数-->李群 指数映射 李群-->李代数 对数映射
Eigen::Vector3d so3 = SO3_R.log();
cout << "so(3) = \n" << so3.transpose() << endl << endl;
// Antisymmetric_matrix 为李代数(三维向量)到反对称矩阵(R 3*3)
// 通过函数 static Matrix3d SO3::hat(const Vector3d & omega) 实现转换;
Eigen::Matrix3d Antisymmetric_matrix = Sophus::SO3::hat(so3);
cout << "Antisymmetric_matrix(李代数 转 反对称矩阵) = " << endl << Antisymmetric_matrix << endl << endl;
// 反对称矩阵到向量 (李代数so3)
// 通过函数 static Vector3d SO3::vee(const Matrix3d & Omega) 实现转换
Eigen::Vector3d Antisymmetric_matrix_to_vector = Sophus::SO3::vee(Antisymmetric_matrix).transpose();
cout << "Antisymmetric_matrix_to_vector(反对称矩阵 转 向量) = " << endl << Antisymmetric_matrix_to_vector << endl << endl;
/********* 区块3 ************/
/******** 区块4 增量扰动模型的更新 *******/
// update_so3 为一个三维向量 以此表示李代数 为更新量
// Sophus::SO3::exp(update_so3) 表示该李代数所对应的李群,对原来的旋转矩阵左乘一个细微的扰动
// 最后得到结果是一个更新的旋转矩阵以李代数的格式输出
Eigen::Vector3d update_so3(1e-4,0,0);
// 左乘更新
Sophus::SO3 SO3_updated = Sophus::SO3::exp(update_so3) * SO3_R;
cout << "SO3 updated = \n" << SO3_updated << endl;
/******** 区块4 ************************/
/****************** 以下是对SE(3)的操作 ************************/
/******** 区块5 ************************/
// 创建平移向量
Eigen::Vector3d t(1,0,0);
// 从 R t 构建特殊欧式群 SE(3) 实际是变换矩阵T的集合
Sophus::SE3 SE3_Rt(R,t);
// 从 q t 构建 SE(3)
Sophus::SE3 SE3_qt(q,t);
// SE(3) 六维数据(结果显示前三维是旋转分量即se(3) 后三维是平移向量t)
cout << "SE3 from R t = \n" << SE3_Rt << endl;
cout << "SE3 from q t = \n" << SE3_qt << endl;
// 将SE(3) 以矩阵的形式输出得到 4*4的变换矩阵T
cout << "SE3 以矩阵的形式输出T = " << endl << SE3_Rt.matrix() << endl << endl;
// 李代数 se(3) 是一个六维向量
typedef Eigen::Matrix<double,6,1> Vector6d;
// SE(3)李群 通过对数映射转化为 李代数se3
Vector6d se3 = SE3_Rt.log();
// se(3) 输出 前三维为平移(此处的平移与平移向量t之间存在一个J雅可比矩阵因子) 后三维度为旋转
cout << "se3 = " << se3.transpose() << endl << endl;
// se3李代数 到 四维矩阵R4*4(这里不再表示反对称矩阵)
Eigen::Matrix<double,4,4> se3_to_matrix = Sophus::SE3::hat(se3);
cout << "se3_to_matrix = " << endl << se3_to_matrix << endl << endl;
// 四维矩阵 到 李代数se3
Eigen::Matrix<double,1,6> se3_to_matrix_toVector = Sophus::SE3::vee(se3_to_matrix).transpose();
cout << "se3_to_matrix_toVector = " << endl << se3_to_matrix_toVector << endl << endl;
/******** 区块5 ************************/
/******** 区块6 ************************/
Vector6d update_se3;
// 全部元素变为o
update_se3.setZero();
// 赋值对矩阵(6*1)的(0,0)处赋值为 1e-4
update_se3(0,0) = 1e-4;
// 左乘
Sophus::SE3 SE3_updated = Sophus::SE3::exp(update_se3) * SE3_Rt;
cout << "SE3 updated(se(3)) = " << endl << SE3_updated << endl;
cout << "SE3 updated = " << endl << SE3_updated.matrix() << endl;
//
/******** 区块5 ************************/
return 0;
}
CMakeLists.txt版本1
cmake_minimum_required(VERSION 3.16)
project(useSophus)
# c++14
set(CMAKE_CXX_STANDARD 14)
# 针对C++编译器进行,对源代码进行优化
set(CMAKE_CXX_FLAGS "-O3")
# 添加Eigen的头文件,用于矩阵的创建运算
include_directories("/usr/local/include/eigen3")
# 使用 sophus 需要使用find_package找到他
find_package(Sophus REQUIRED)
# 添加Sophus的头文件,用于李代数的计算
include_directories(${Sophus_INCLUDE_DIRS})
# 生成可执行文件
add_executable(useSophus main.cpp)
# 链接Sophus源代码编译生成的库
target_link_libraries( useSophus ${Sophus_LIBRARIES} )
CMakeLists.txt版本2
cmake_minimum_required(VERSION 3.16)
project(useSophus)
set(CMAKE_BUILD_TYPE "Release") # Debug也是其中一种
set(CMAKE_CXX_FLAGS "-O3")
# 添加库源文件 生成 动态库
add_library(so3 SHARED ~/slam14_m/slambook/3rdparty/Sophus/sophus/so3.cpp)
add_library(se3 SHARED ~/slam14_m/slambook/3rdparty/Sophus/sophus/se3.cpp)
# 添加头文件
include_directories("/usr/local/include/eigen3")
include_directories("~/slam14_m/slambook/3rdparty/Sophus")
# 添加执行文件
add_executable(useSophus main.cpp)
# 链接库
target_link_libraries(useSophus so3)
target_link_libraries(useSophus se3)
运行结果
/home/zxz/my_slam14/ch4/useSophus/cmake-build-debug/useSophus
SO(3) from matrix:
0 0 1.5708
SO(3) from vector:
0 0 1.5708
SO(3) from quaternion:
0 0 1.5708
so(3) =
0 0 1.5708
Antisymmetric_matrix(李代数 转 反对称矩阵) =
0 -1.5708 0
1.5708 0 -0
-0 0 0
Antisymmetric_matrix_to_vector(反对称矩阵 转 向量) =
0
0
1.5708
SO3 updated =
7.85398e-05 -7.85398e-05 1.5708
SE3 from R t =
0 0 1.5708
1 0 0
SE3 from q t =
0 0 1.5708
1 0 0
SE3 以矩阵的形式输出T =
2.22045e-16 -1 0 1
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
se3 = 0.785398 -0.785398 0 0 0 1.5708
se3_to_matrix =
0 -1.5708 0 0.785398
1.5708 0 -0 -0.785398
-0 0 0 0
0 0 0 0
se3_to_matrix_toVector =
0.785398 -0.785398 0 0 0 1.5708
SE3 updated(se(3)) =
0 0 1.5708
1.0001 0 0
SE3 updated =
2.22045e-16 -1 0 1.0001
1 2.22045e-16 0 0
0 0 1 0
0 0 0 1
进程已结束,退出代码为 0














 1075
1075











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









