









数据集集合(一)
上面是其他数据集的讲解。。
KITTI数据集 #3D目标检测用
KITTI(卡尔斯鲁厄技术研究所和丰田技术研究所)是移动机器人和自动驾驶领域最受欢迎的数据集之一。它包括用各种传感器模式记录的数小时交通场景,包括高分辨率RGB、灰度立体相机和3D激光扫描仪。尽管数据集很受欢迎,但它本身并不包含语义分割的基本事实。然而,不同的研究人员已经对数据集的部分进行了手动注释,以满足他们的需求。阿尔瓦雷斯等人从道路检测挑战中为323幅图像生成了地面真相,包括三类:道路、垂直和天空。Zhang等人注释了252次(140次用于培训,112次用于测试)采集——RGB和Velodyne扫描——来自10个目标类别的跟踪挑战:建筑物、天空、道路、植被、人行道、汽车、行人、自行车、标志/杆和围栏。Ros等人将170幅训练图像和46幅测试图像(来自视觉里程表挑战)标记为11个类别:建筑、树木、天空、汽车、标志、道路、行人、围栏、电线杆、人行道和骑自行车者。
#3D目标检测用

CelebA (CelebFaces Attributes Dataset) 人脸数据集
CelebFacesAttributes数据集包含202599张来自10177位名人的178×218大小的面部图像,每个图像都带有40个二进制标签,表示头发颜色、性别和年龄等面部属性。

Market-1501 重识别 姿态识别
Market-1501是一个用于人员重新识别的大规模公共基准数据集。它包含由六个不同摄像机捕获的1501个身份,以及使用可变形零件模型行人检测器获得的32668个行人图像边界框。每个人在每个视点处平均有3.6幅图像。数据集分为两部分:750个身份用于训练,其余751个身份用于测试。在官方测试协议中,选择3368个查询图像作为探针集,以在19732个参考图库图像中找到正确匹配。

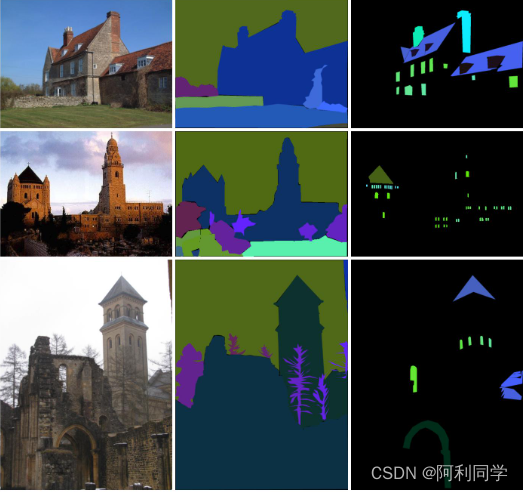
ADE20K数据集
ADE20K语义分割数据集包含超过20K个以场景为中心的图像,这些图像用像素级对象和对象部分标签进行了详尽的注释。共有150个语义类别,包括天空、道路、草地等事物,以及人、车、床等离散对象。
有雾和对应无雾数据集
描述:2981对-无雾和雾的图像数据。收集场景包括城市道路、建筑物、商店、乡村道路、山脉、废墟、公园、海滨、花卉、树木和其他户外场景。数据多样性包括多个时间段、多个场景、多个采集角度和不同的雾度。该数据集可用于图像除雾等任务。

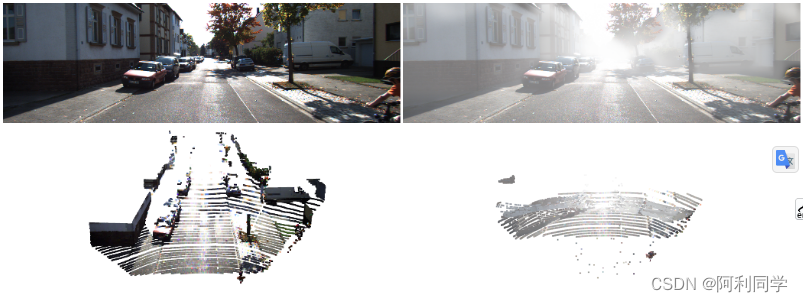
雷达和雾天道路数据集
我们提出了具有雾的增强KITTI数据集,用于具有从20到80米的不同能见度范围的相机和激光雷达传感器。
去雨去雾数据集 雨天数据集
具有场景深度信息的雨水去除数据集。
与之前的数据集相比,这个数据集都是户外照片,每个都有一个深度图,雨图显示了不同程度的雨和雾。

雪天道路数据集
实习项目(挪威北冰洋大学)数据集
数据集包含5个月的数据,包括天气条件、摩擦系数、行驶距离、风速、表面温度、气温等。该数据集由DIT4BEARs为挪威UiT北极大学的智能道路实习项目提供
它可以用于天气预报、道路摩擦预测、智能道路主张、减少欧洲北极地区的事故率。

数据集获取:数据集
如果对你有用还请点个赞支持下。更多数据集可以点赞私信交流。

















 1101
1101











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











