







目录
1. INVARIANTS
一个不变式需要满足以下三个属性:
- 当循环开始时,不变式是正确的
- 在每一次循环迭代之后,不变式仍然是正确的
- 当循环条件为假时,不变式能推出循环结束后的条件(即后置条件)
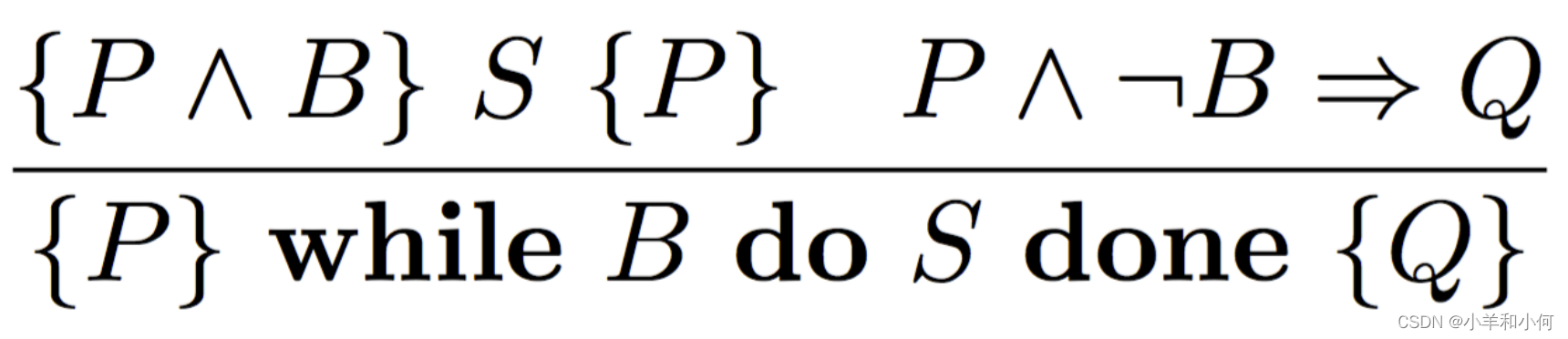
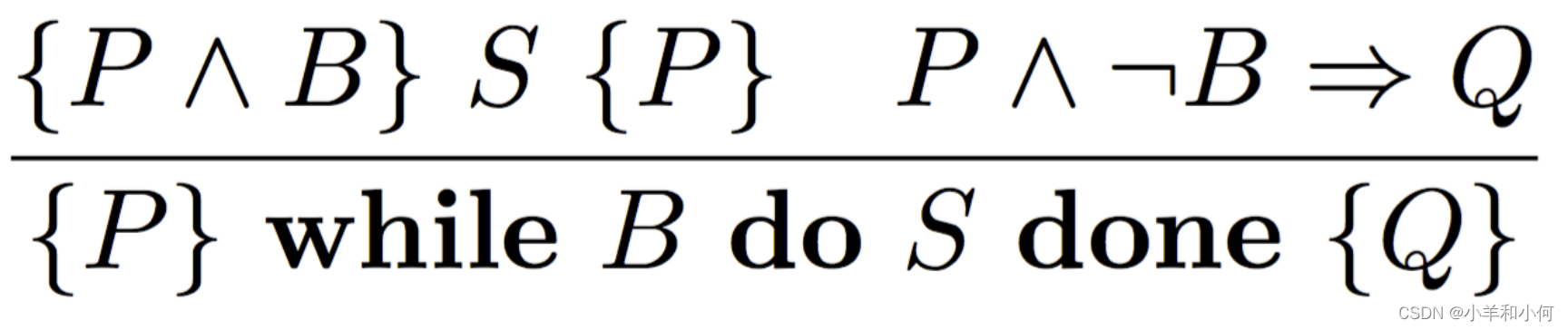
其中循环结构的一般形式表示为:({P ∧B} S {P} P ∧ ¬B => Q) / ({P} while B do S done {Q}),其中P为不变式,B为循环条件,S为循环体中的语句,Q为循环结束后的条件。
1.1 例子
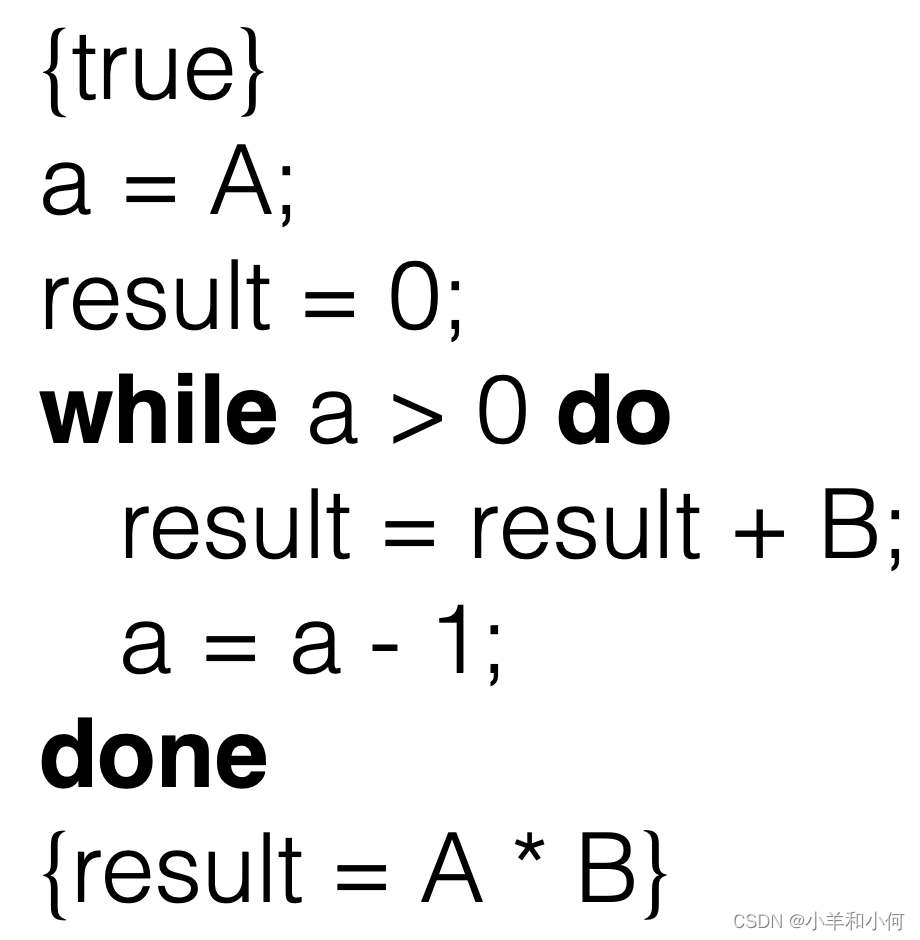
a = A;
result = 0;
while a > 0 do
result = result + B;
a = a - 1;
done这个程序计算的是result = A * B。
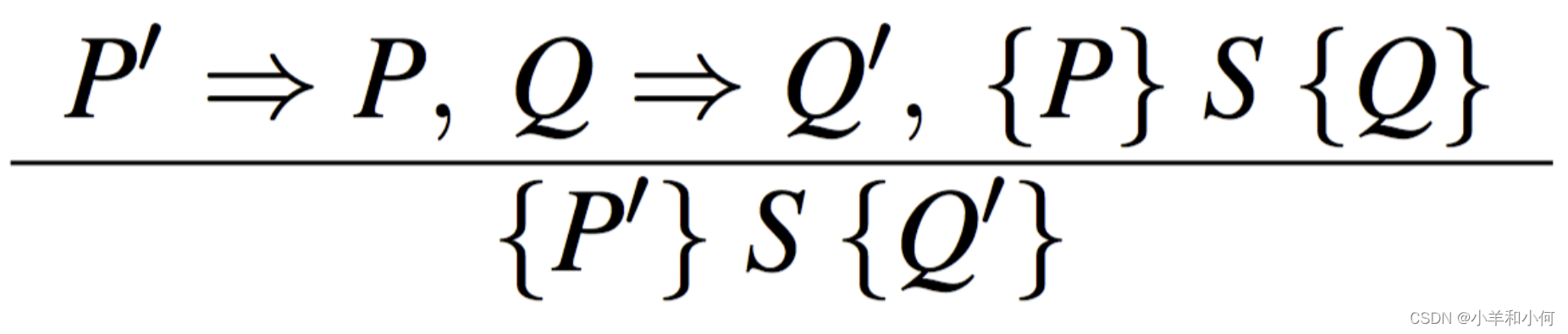
consequence rules:
sequence rules: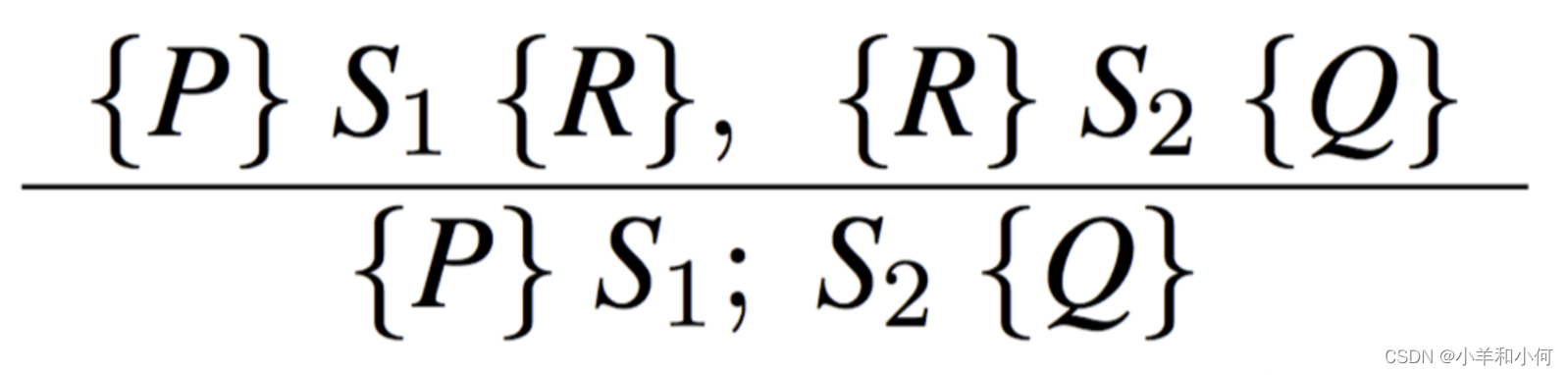
{true}
{?P}
a = A;
{?P1}
result = 0;
{?I}
while a > 0 do
result = result + B;
a = a - 1;
done
{result = A * B}iteration/while loop rule:
{?I}
while a > 0 do
{?I ∧ a > 0}
result = result + B;
a = a - 1;
{?I}
done
{?I ∧ a ≤ 0}
{result = A * B}
在用不变式对这个循环结构进行分析时,我们需要找到一个适合的不变式。根据前面说的不变式的性质,我们可以知道,这个不变式通常需要涉及到循环中改变的变量和后置条件中的内容。
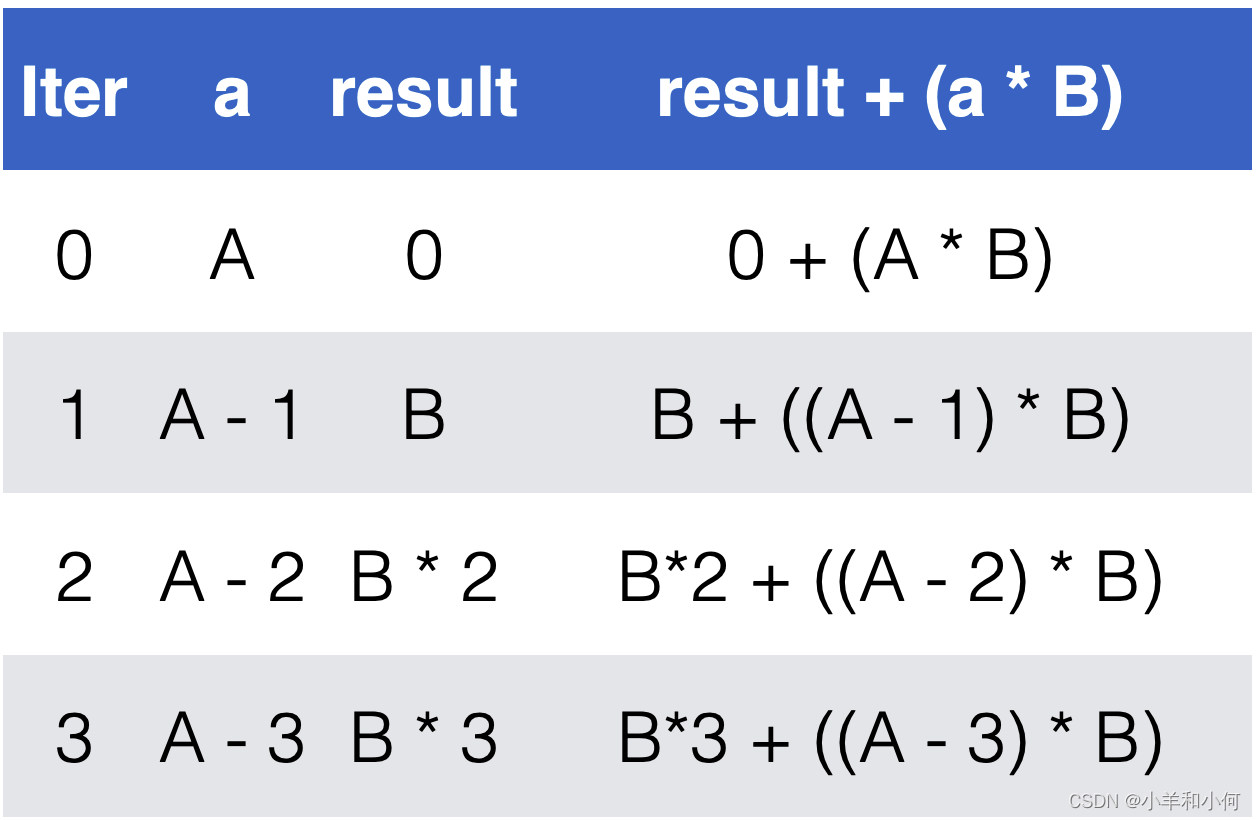
在这个例子中,循环中改变的变量有result和a,后置条件中涉及到的变量有A和B。根据这些变量,我们可以得到一个可能的不变式:result + (a * B) = A * B。
我们观察到每次迭代,result 增加 B,而 a 减1。所以我们可以选择 result + a * B = A * B 作为我们的循环不变量。
接下来,我们可以验证这个不变式是否满足不变式的性质:
- 当循环开始时,
a的值是A,result的值是0,所以result + (a * B) = 0 + (A * B) = A * B,满足不变式。 - 在每一次循环迭代之后,
result增加B,a减1,所以result + (a * B)的值没有变化,仍然等于A * B,满足不变式。 - 当
a变为0时,result的值变为A * B,所以result + (a * B) = result + 0 = A * B,满足后置条件。
因此,我们可以确认这个不变式是正确的。这个不变式也帮助我们理解了这个程序的功能:它实现的是一个乘法运算,其中的循环就是不断地做加法运算来实现乘法。
1.2 正式的证明
这里有两个关键目标:
- 在循环开始时和每一次循环之后,我们需要证明不变式(Invariant)
result + (a * B) = A * B是正确的。
- 在循环结束时(即
a不大于0时),我们需要证明result = A * B。
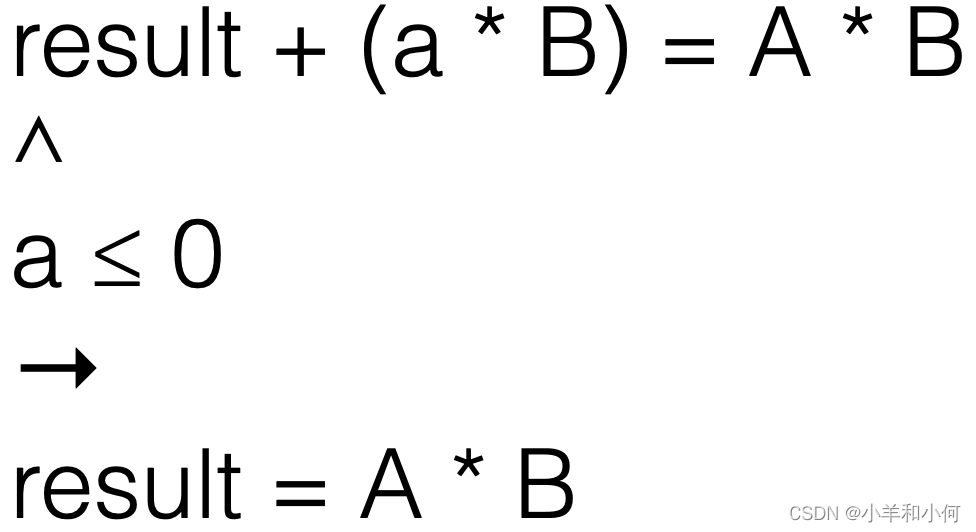
目标1在早前的幻灯片中已经完成。对于目标1,我们可以发现,如果我们只使用result + (a * B) = A * B这个不变式,并不能推导出result = A * B。因为当a小于等于0时,它可能是负数,而在这个程序中,a应当是非负的。
因此,我们需要将不变式加强,包括条件a ≥ 0。所以,新的不变式变为result + (a * B) = A * B ∧ a ≥ 0。
接下来,我们进行两个目标的证明:
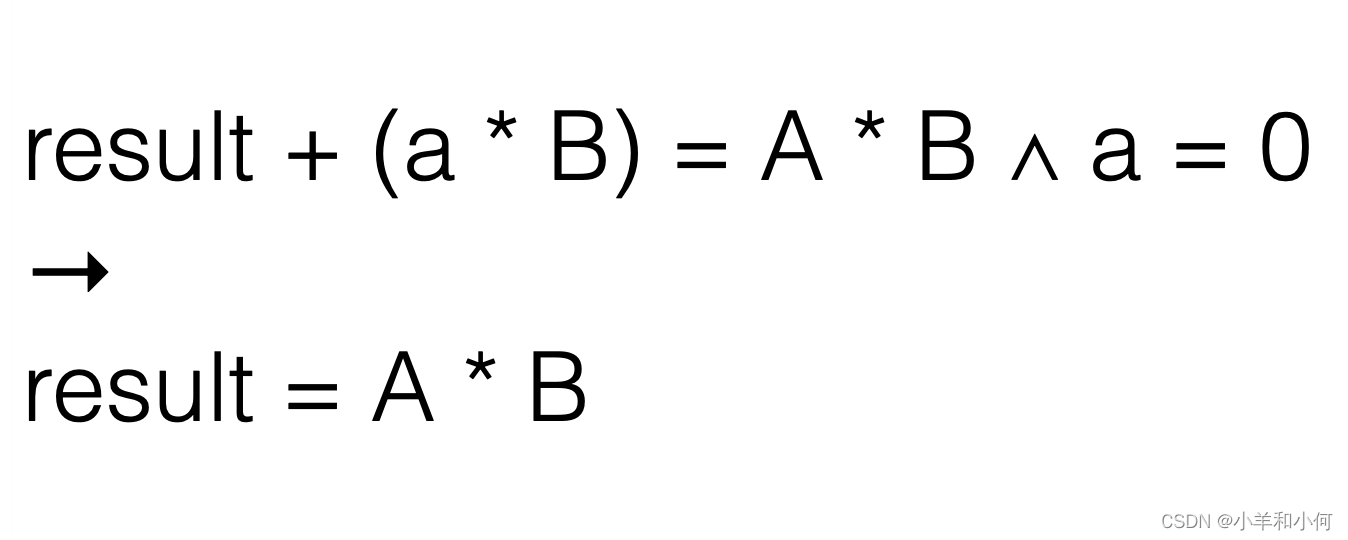
目标1(循环结束时):我们需要证明result + (a * B) = A * B ∧ a = 0能够推导出result = A * B。这个显然是正确的,当a = 0时,result = A * B。
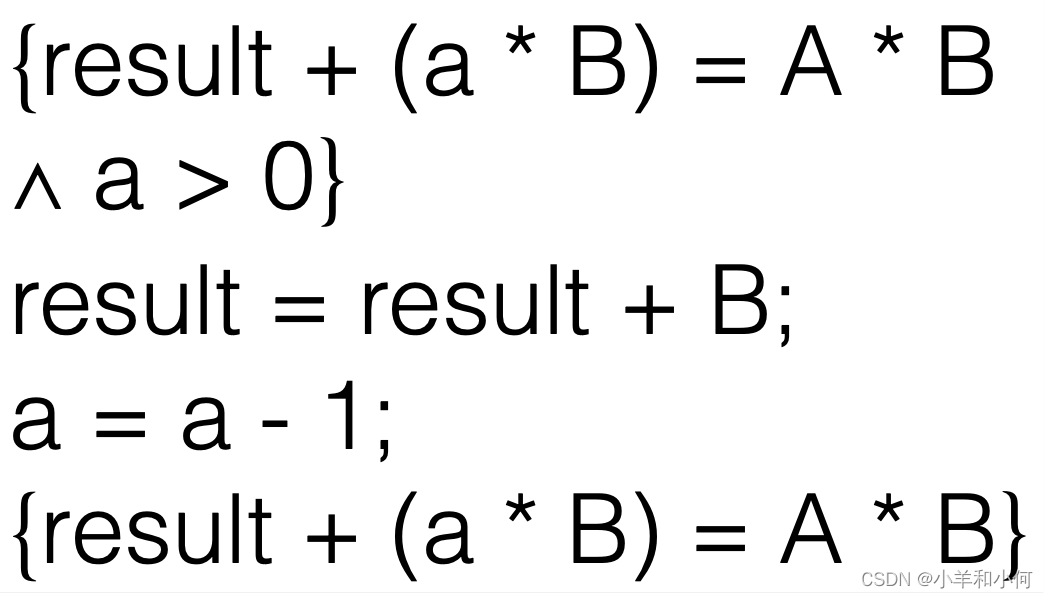
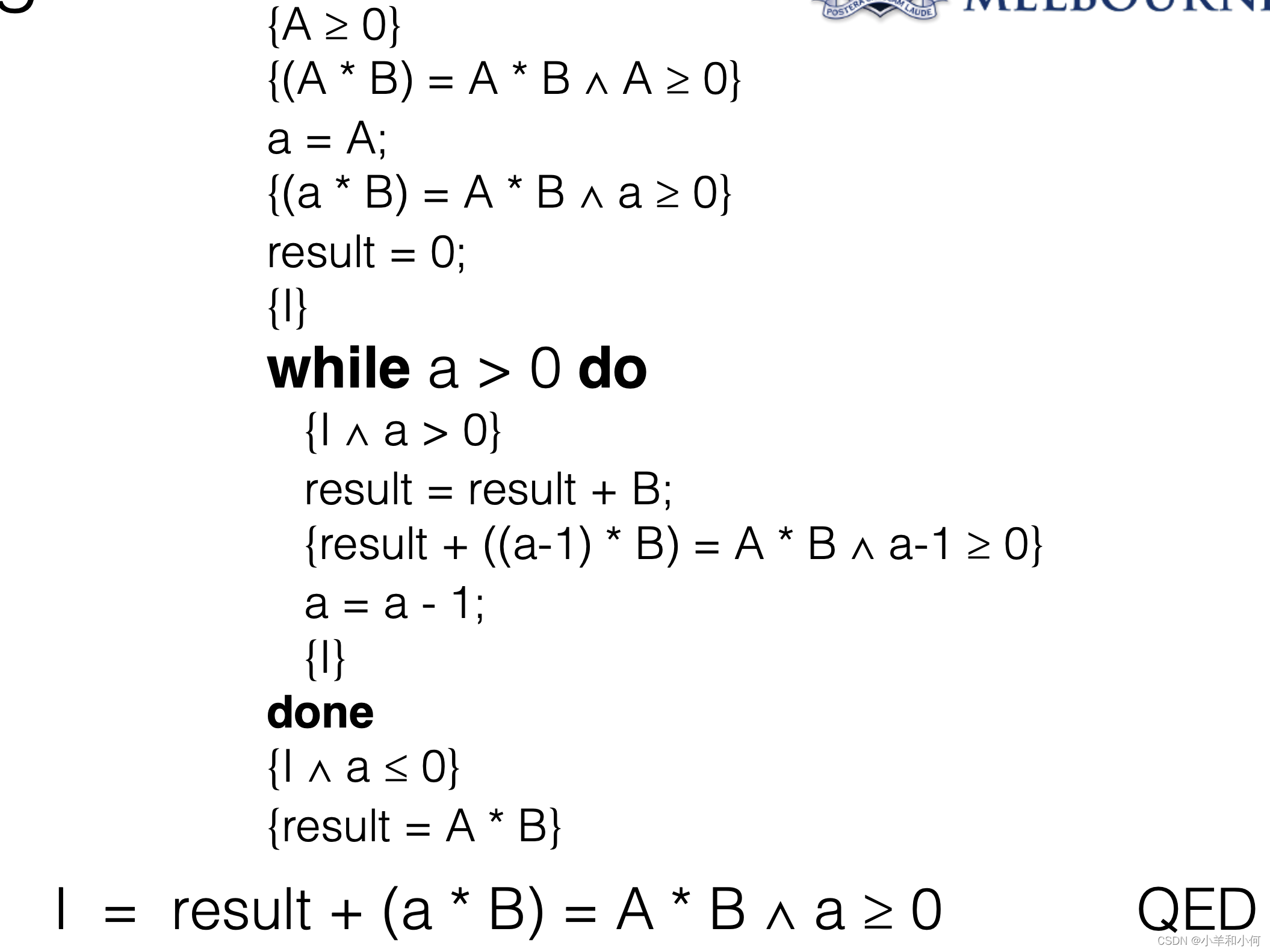
目标2(循环中):我们需要证明,给定result + (a * B) = A * B ∧ a > 0,执行一次循环后(result = result + B; a = a - 1;),仍能保持不变式result + (a * B) = A * B ∧ a ≥ 0。
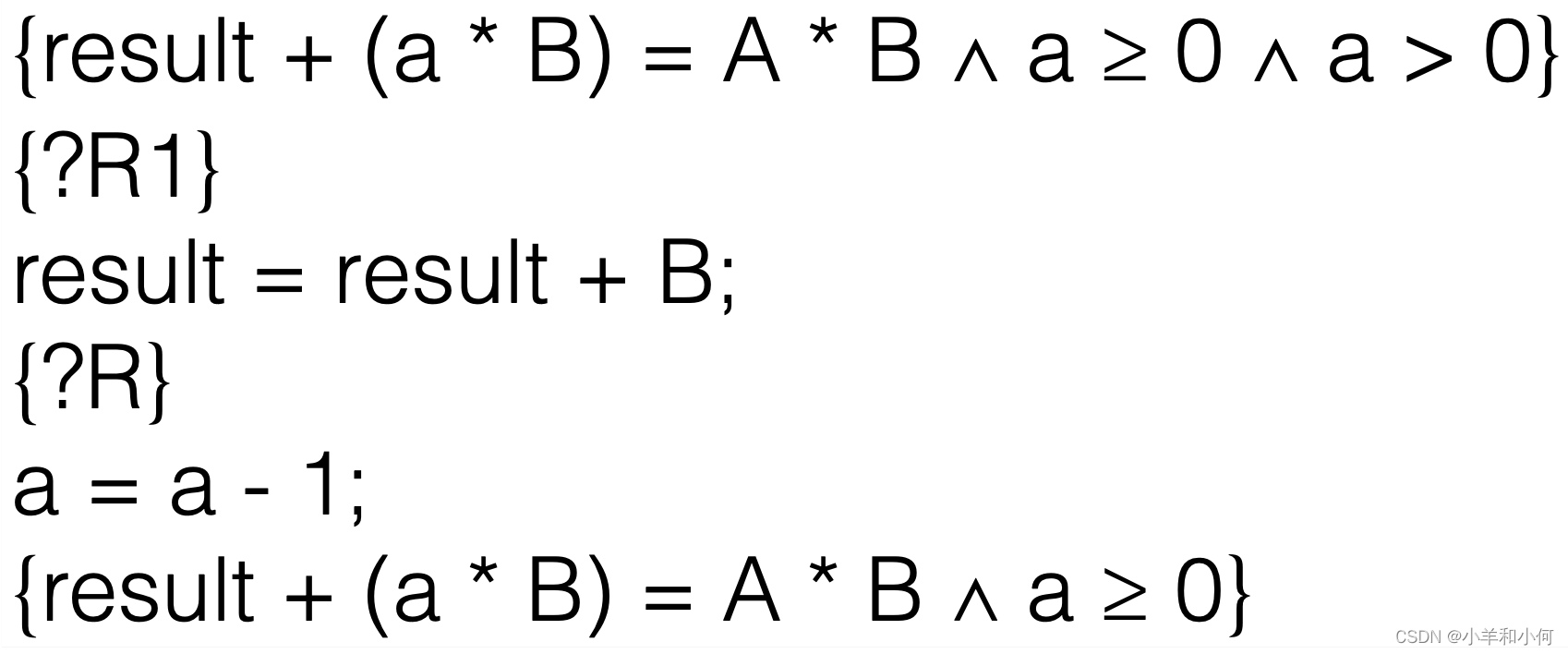
将待证明的整个过程分成两个小步骤,每一步都有一个中间条件?R1和?R。
![]()
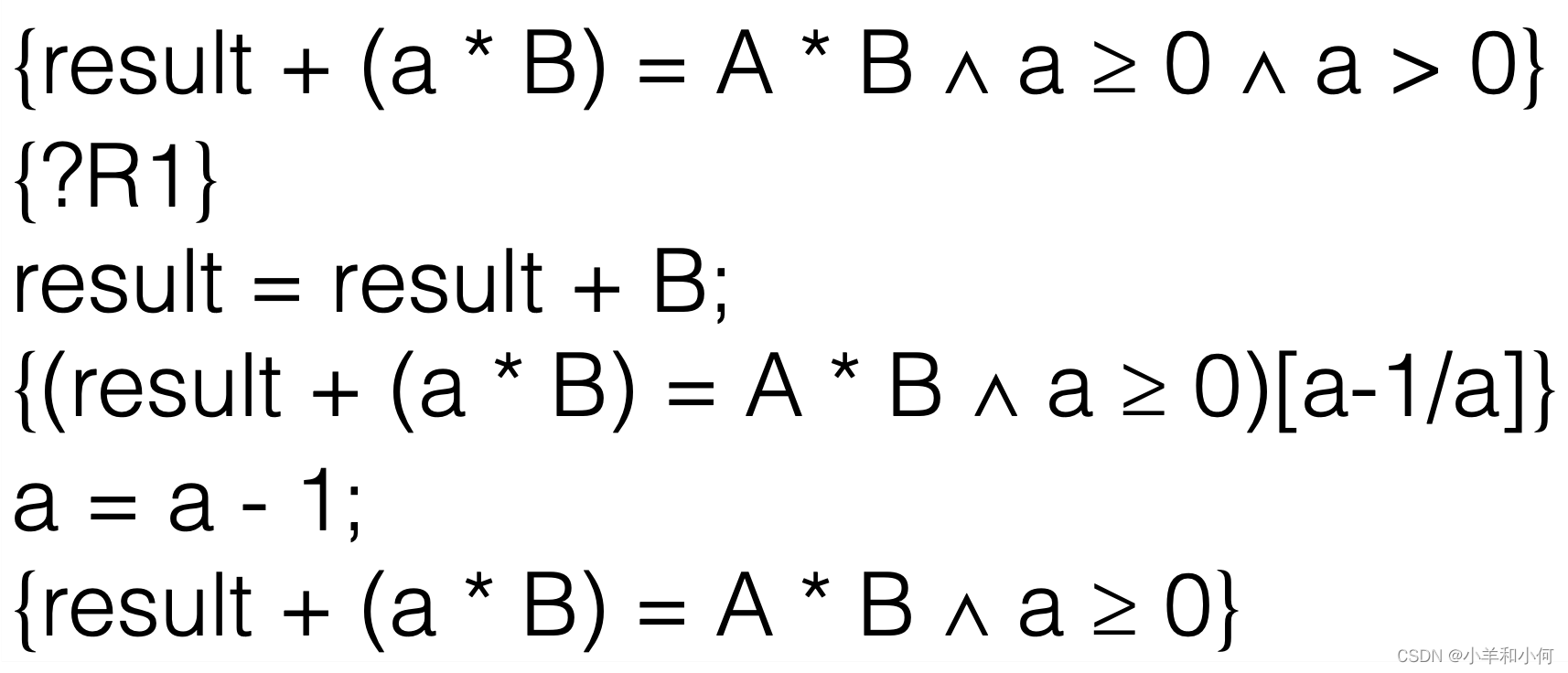
使用霍尔逻辑的赋值规则(Assignment Rule)来找出?R。赋值规则说,如果你有一个赋值x := E和一个后置条件P,那么前置条件是P[E/x]。这里,我们将a - 1替换a。
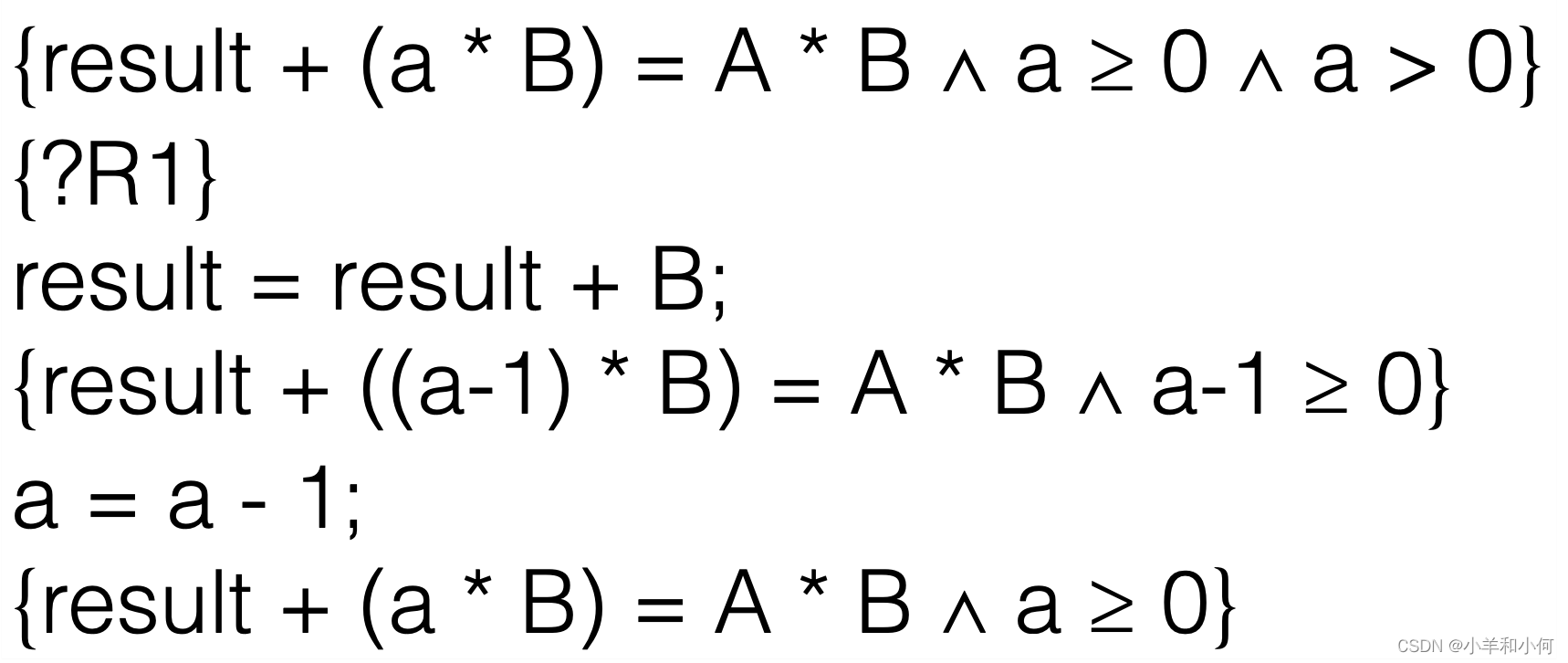
在前置条件中完成替换。
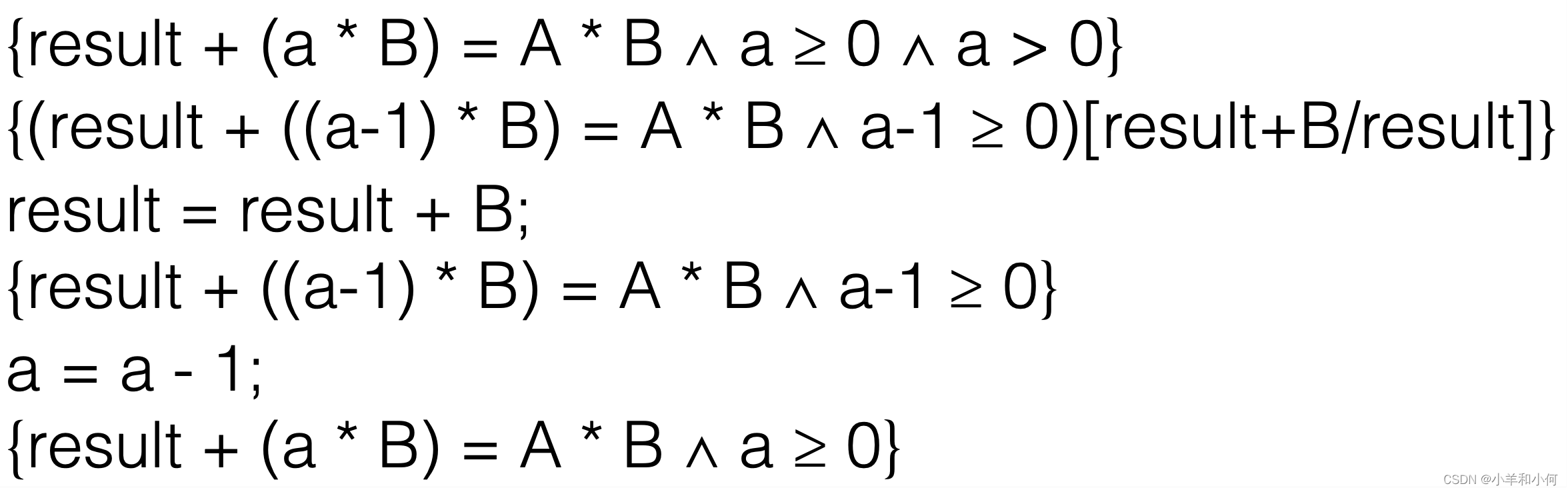
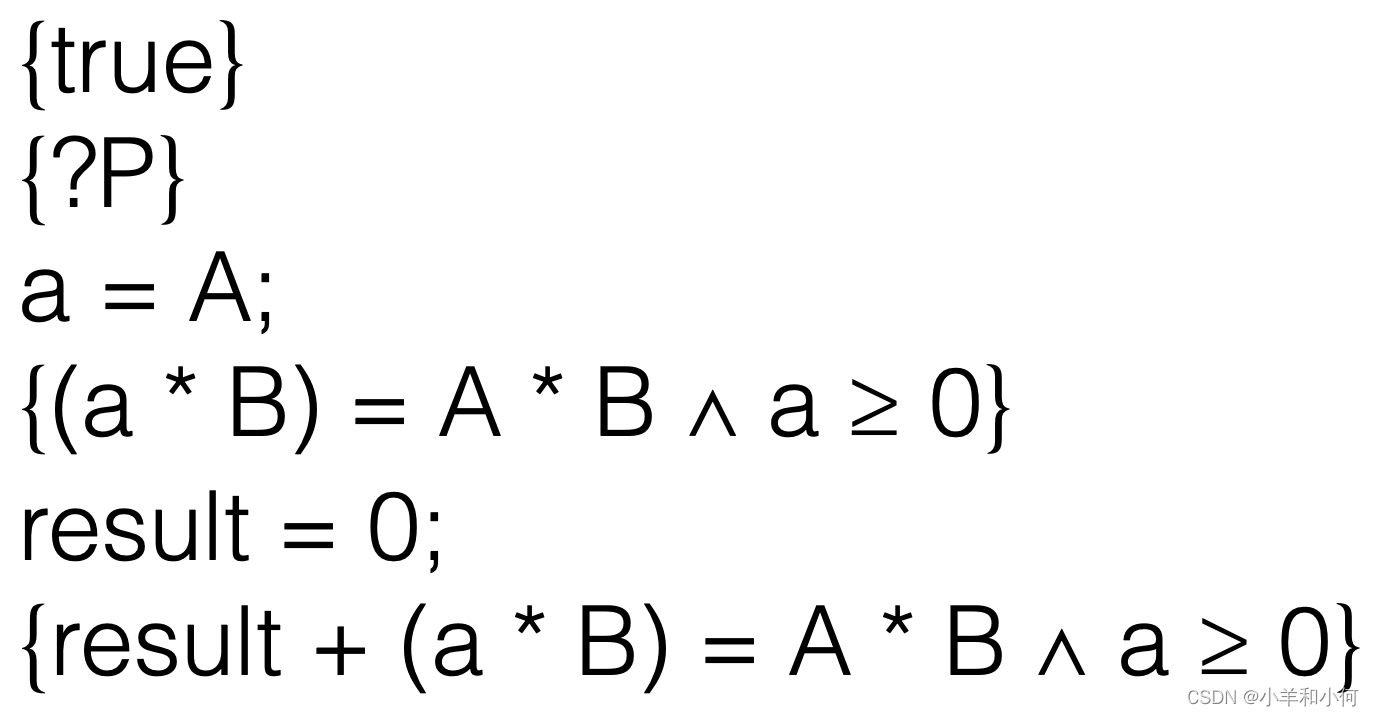
同样,使用赋值规则来找出?R1。这次,我们将result + B替换result。
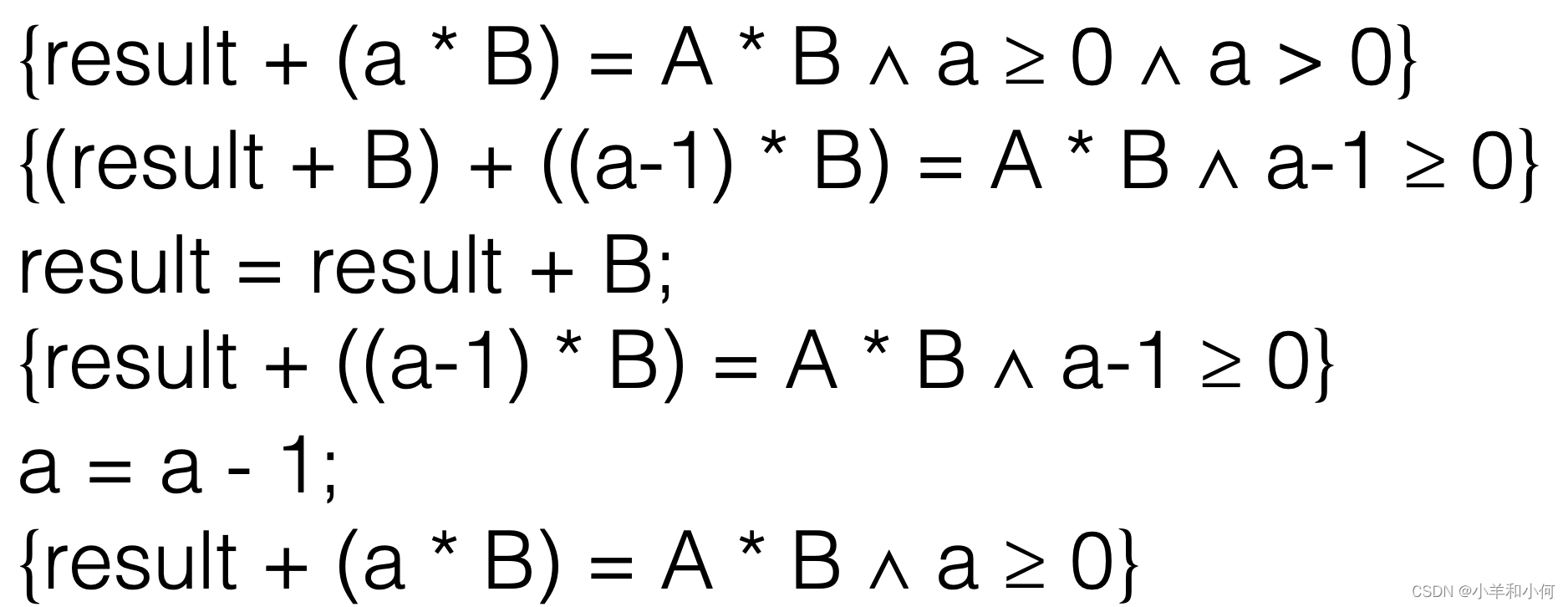
在前置条件中完成替换。
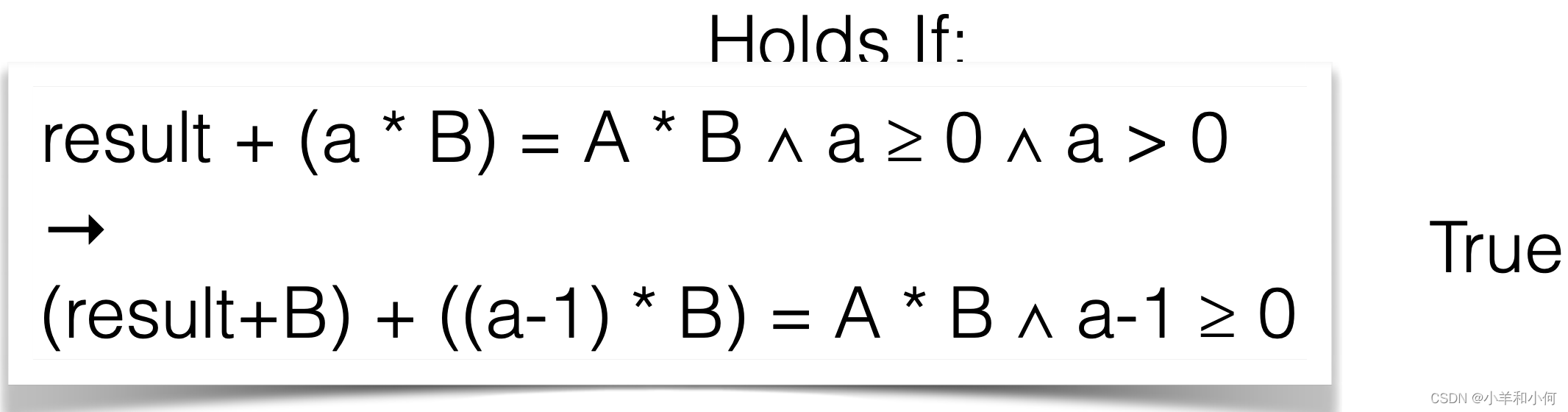
Holds If:这一部分是在检查步骤5得到的前置条件是否能够由原前置条件推导出。在这里,显然是可以的。
Rest of the Program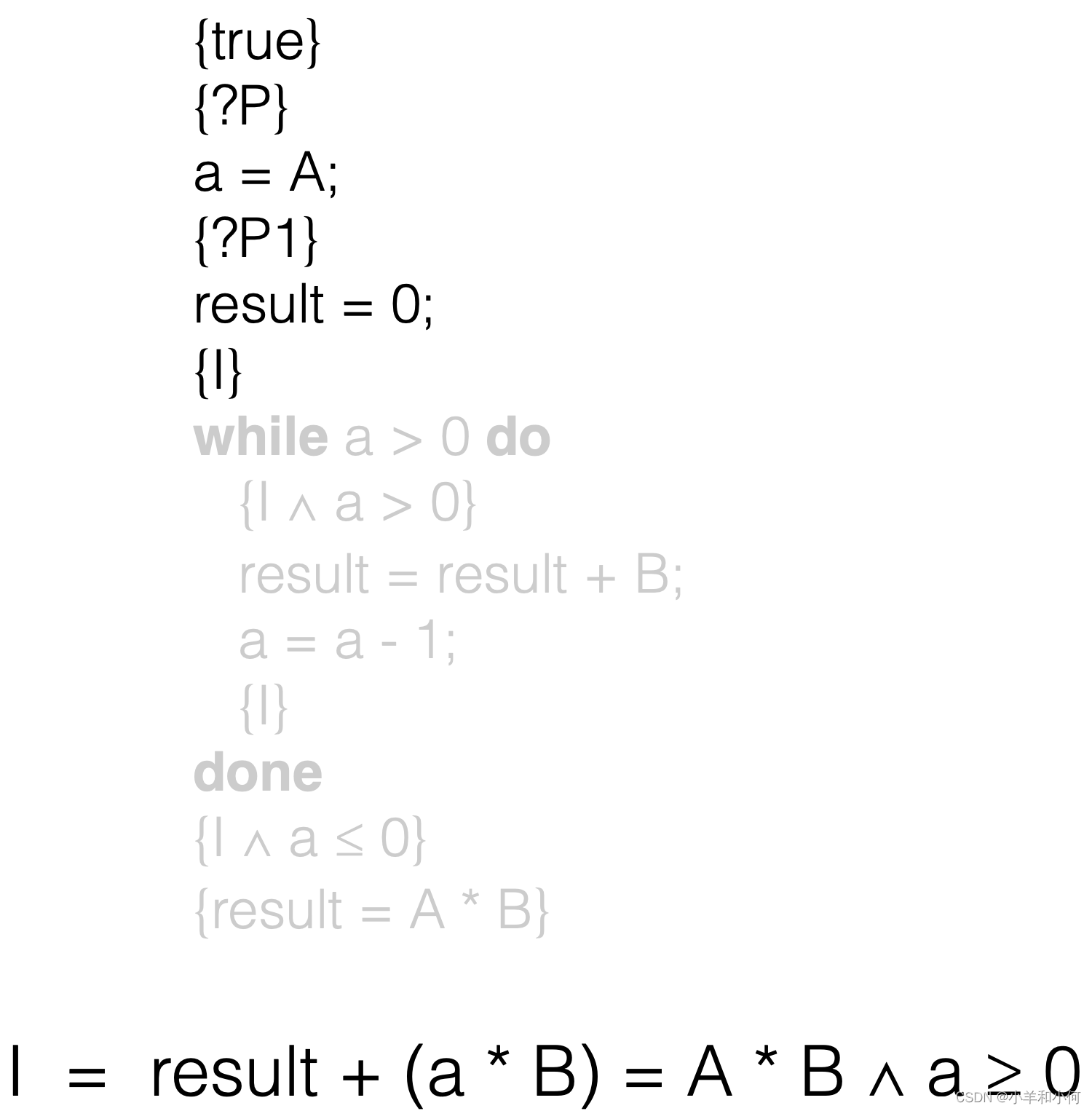
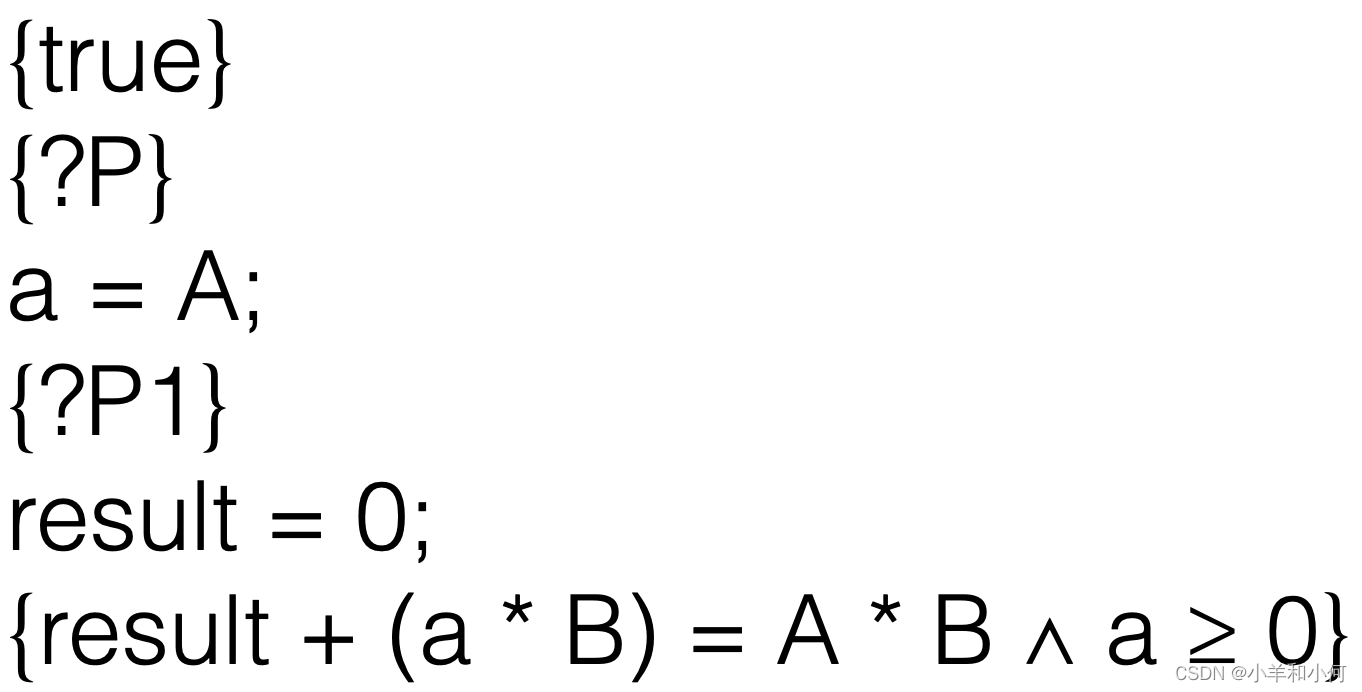
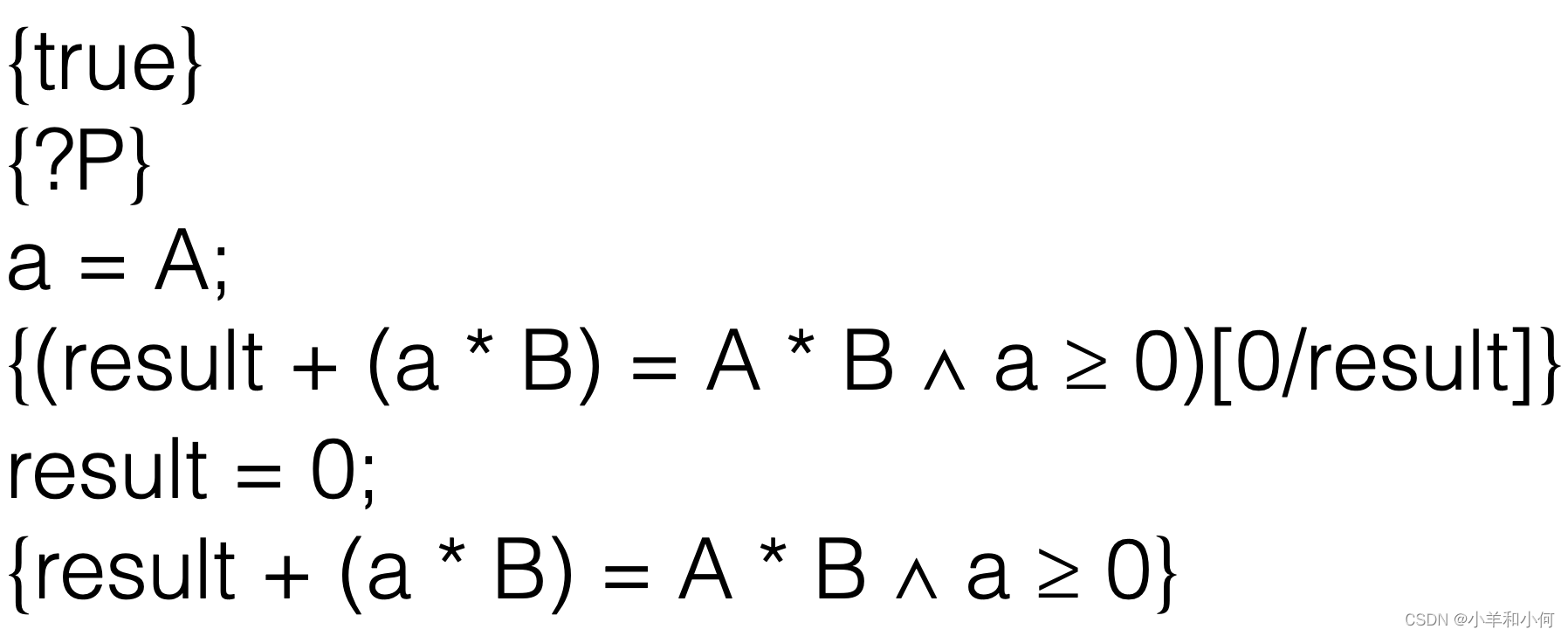
同理,这些步骤都在找出每一步的前置条件。唯一不同的是,这里的目标是找出整个程序的前置条件,而不仅仅是循环部分。
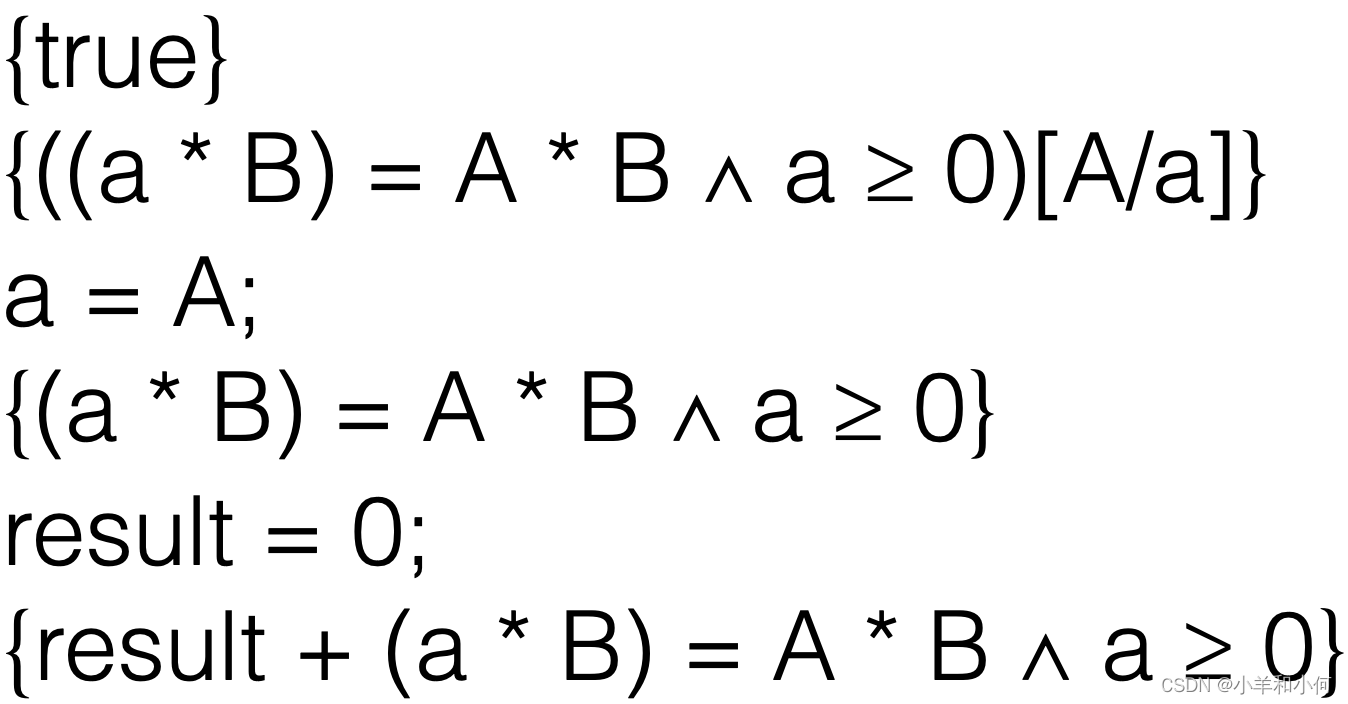
这一步是在处理赋值a = A。同样,我们使用赋值规则,将A替换a。
在前置条件中完成替换。
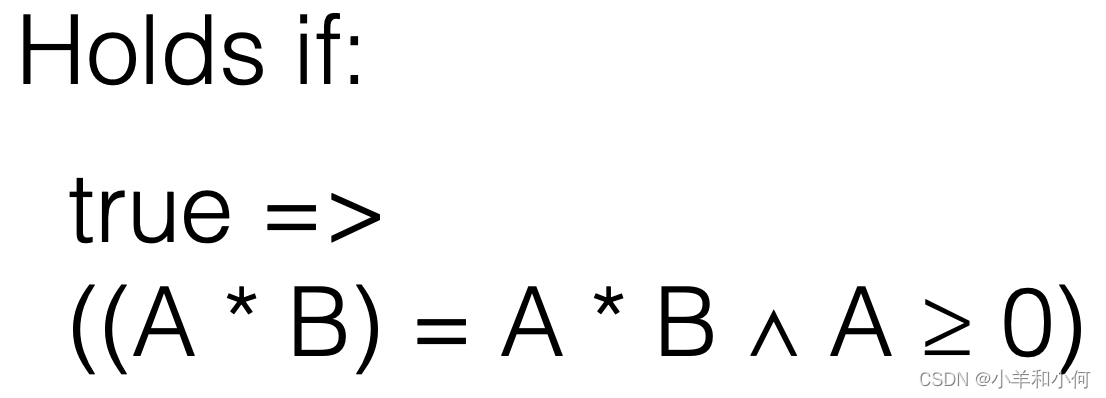
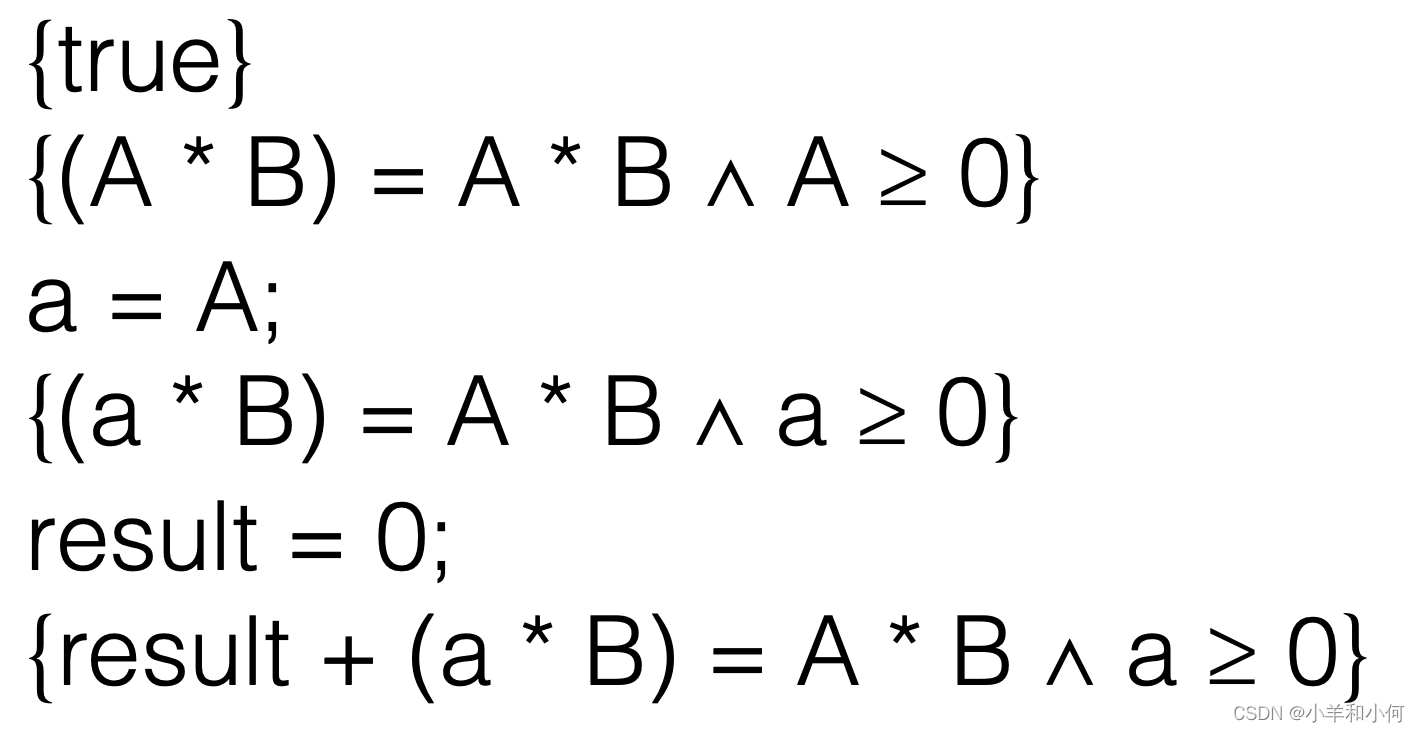
Holds If:这一部分是在检查步骤11得到的前置条件是否能够由原前置条件推导出。在这里,我们发现,如果A小于0,那么前置条件并不能得到满足,所以我们得出结论:这个推导不成立。
Strengthen Precondition
因为上一步的结果,我们需要加强前置条件,保证A ≥ 0。
在前置条件中添加了新的条件。
这是一个完整的霍尔逻辑证明,包括前置条件、后置条件、以及循环的不变式。在这一步,我们得出了最终的结论:在前置条件A ≥ 0下,这个程序能够正确计算result = A * B。
这部分的证明包含了一些较复杂的代换和推导,核心的证明步骤是:首先按照程序的执行,将result和a的值进行更新;然后,证明更新后的表达式仍满足不变式。这里的关键是,不变式中的result增加了B,而a减小了1,所以result + (a * B)的值并没有改变。
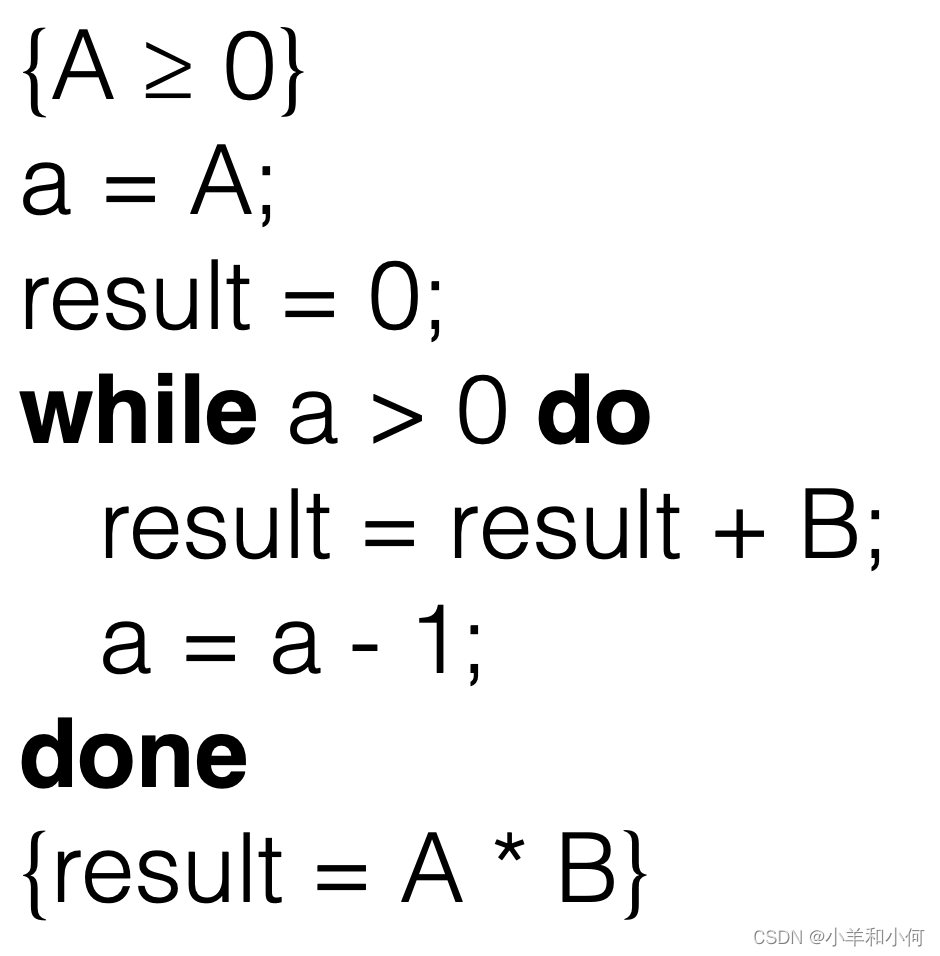
然后,我们检查这个循环程序的前置条件。我们发现,当A小于0时,前置条件并不满足。因此,我们需要加强前置条件,确保A ≥ 0。
最后,我们得到了完整的循环程序和它的霍尔逻辑表示:
{A ≥ 0}
a = A;
result = 0;
while a > 0 do
result = result + B;
a = a - 1;
done
{result = A * B}
其中,不变式(Invariant)是result + (a * B) = A * B ∧ a ≥ 0。通过这个不变式,我们可以保证在循环开始、循环中、循环结束时,程序的状态都满足我们的期望,从而证明了这个循环程序的正确性。















 668
668











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









