







记录学习微分方程时遇到的“拦路虎”,如有不足请斧正。
一、导弹追击问题
二、问题建模
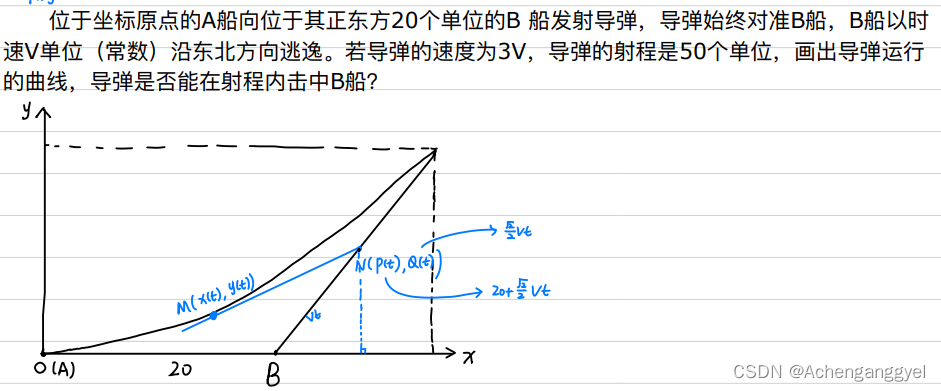
简而言之,一导弹一船。导弹从(0,0)出发,船从(20,0)出发。导弹的方向朝船,速度为3v;船的方向为东北,速度为v。v为常数。导弹的射程是50个单位(描述距离)。欲求:导弹能否在射程内击中船?
以正东为x轴正方向,正北为y轴正方向
首先定义导弹所在点M的坐标(
x
(
t
)
x(t)
x(t),
y
(
t
)
y(t)
y(t)),船N坐标(
P
(
t
)
,
Q
(
t
)
P(t),Q(t)
P(t),Q(t)),表示两点的位置随时间
t
t
t变化而变
以下公式用
x
,
y
,
P
,
Q
x,y,P,Q
x,y,P,Q代替
x
(
t
)
,
y
(
t
)
,
P
(
t
)
,
Q
(
t
)
x(t),y(t),P(t),Q(t)
x(t),y(t),P(t),Q(t)
通过导弹的速度分解,得到第一个等式:
(
d
x
d
t
)
2
+
(
d
y
d
t
)
2
=
(
3
v
)
2
(1)
(\frac{\mathrm{d}x}{\mathrm{d}t})^2+(\frac{\mathrm{d}y}{\mathrm{d}t})^2 = (3v)^2 \tag{1}
(dtdx)2+(dtdy)2=(3v)2(1)
由于导弹的方向朝船,即导弹M速度方向朝N,即,
d
y
d
x
=
Q
−
y
P
−
x
(2)
\frac{\mathrm{d}y}{\mathrm{d}x} = \frac{Q-y}{P-x} \tag{2}
dxdy=P−xQ−y(2)
因为
x
,
y
x,y
x,y都是
t
t
t的函数,上式转为下式,并赋值常数
λ
\lambda
λ
d
y
d
t
d
x
d
t
=
Q
−
y
P
−
x
=
λ
\frac{\frac{\mathrm{d}y}{\mathrm{d}t}}{\frac{\mathrm{d}x}{\mathrm{d}t}} = \frac{Q-y}{P-x} = \lambda
dtdxdtdy=P−xQ−y=λ
因此,
d
x
d
t
,
d
y
d
t
\frac{\mathrm{d}x}{\mathrm{d}t},\frac{\mathrm{d}y}{\mathrm{d}t}
dtdx,dtdy可表示为
{
d
x
d
t
=
λ
(
P
−
x
)
d
y
d
t
=
λ
(
Q
−
y
)
(3)
\begin{cases} \frac{\mathrm{d}x}{\mathrm{d}t} = \lambda(P-x)\\ \frac{\mathrm{d}y}{\mathrm{d}t} =\lambda(Q-y) \tag{3} \end{cases}
{dtdx=λ(P−x)dtdy=λ(Q−y)(3)
目标是在方程中消去未知参数
λ
\lambda
λ并优化公式(3),因此联立(1)(3),得
λ
2
[
(
P
−
x
)
2
+
(
Q
−
y
)
2
]
=
9
v
2
\lambda^2[(P-x)^2+(Q-y)^2] = 9v^2
λ2[(P−x)2+(Q−y)2]=9v2
故,
λ
=
3
v
(
P
−
x
)
2
+
(
Q
−
y
)
2
(4)
\lambda = \frac{3v}{\sqrt{(P-x)^2+(Q-y)^2}} \tag{4}
λ=(P−x)2+(Q−y)23v(4)
因为
λ
\lambda
λ在公式(2)中出现,此处代入获得
d
x
d
t
,
d
y
d
t
\frac{\mathrm{d}x}{\mathrm{d}t},\frac{\mathrm{d}y}{\mathrm{d}t}
dtdx,dtdy的matlab中标准微分方程 形式
{
d
x
d
t
=
3
v
(
P
−
x
)
2
+
(
Q
−
y
)
2
×
(
P
−
x
)
d
y
d
t
=
3
v
(
P
−
x
)
2
+
(
Q
−
y
)
2
×
(
Q
−
y
)
(5)
\begin{cases} \frac{\mathrm{d}x}{\mathrm{d}t} = \frac{3v}{\sqrt{(P-x)^2+(Q-y)^2}} \times (P-x)\\ \frac{\mathrm{d}y}{\mathrm{d}t} = \frac{3v}{\sqrt{(P-x)^2+(Q-y)^2}} \times (Q-y) \end{cases} \tag{5}
⎩
⎨
⎧dtdx=(P−x)2+(Q−y)23v×(P−x)dtdy=(P−x)2+(Q−y)23v×(Q−y)(5)
之后,对船的
x
,
y
x,y
x,y轴速度进行数学描述(合速度大小
v
v
v,方向东北,即和x轴夹角为45度),则有:
{
d
P
d
t
=
v
×
c
o
s
(
4
5
º
)
d
Q
d
t
=
v
×
s
i
n
(
4
5
º
)
(6)
\begin{cases} \frac{\mathrm{d}P}{\mathrm{d}t} = v \times cos(45^º)\\ \frac{\mathrm{d}Q}{\mathrm{d}t} =v \times sin(45^º) \end{cases} \tag{6}
{dtdP=v×cos(45º)dtdQ=v×sin(45º)(6)
最终,
x
,
y
,
P
,
Q
x,y,P,Q
x,y,P,Q的标准微分方程(5,6)建立完毕
同时,明确初始值:
x
(
0
)
=
0
,
y
(
0
)
=
0
,
P
(
0
)
=
20
,
Q
(
0
)
=
20
x(0) = 0, y(0) = 0, P(0) = 20,Q(0) = 20
x(0)=0,y(0)=0,P(0)=20,Q(0)=20
三、matlab编程
1. 判断方程是否有解析解
使用dsolve(‘方程1’…‘方程n’,‘所有初始条件’,‘自变量’),查看是否存在解析解。如果在,则能获得因变量
x
,
y
,
P
,
Q
x,y,P,Q
x,y,P,Q表达式并直接画图。
这里偷懒使用了公式 (1)(2)作为方程1,2
%自变量't'该项可省,因dsolve默认自变量为t
dsolve('Dx^2+Dy^2=9*v^2','Dy/Dx=(q-y)/(p-x)','Dq = v/sqrt(2)','Dp = v/sqrt(2)','x(0)=0,y(0)=0,q(0)=0,p(0)=20','t')
按F9运行所选内容

不出所料,果然找不到解析解…然后标准形式的微分方程(5)(6)写入.m文件中找数值解,代码在第2部分。
2. matlab编程计算数值解
新建函数zztest.m。要注意的是使用求解函数求数值解时,函数头最好写成function dy = 函数名(自变量,因变量向量(通过列向量存储多变量))
这里将参数传入,函数头改为function dy = 函数名(自变量,因变量向量(通过列向量存储多变量),参数1,…,参数n)
但调用该函数求解时,需要用匿名函数修改
% 保存在zztest.m,和model.m在同一文件夹
function dy = zztest(t,y,v)
%导弹追击船
% v是速度量
% 其实可以写在这个文件内,但因为是自定义参数所以从求解过程中分离
% 如
% v = 1;
dy = zeros(4,1); %1,2是导弹的x,y,3,4是船的P,Q;最好用该方式表示多变量
dy(1) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(3)-y(1)); %左侧只能为导数dy形式,右侧不能出现导数
dy(2) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(4)-y(2));
dy(3) = v*cos(4/pi);
dy(4) = v*sin(4/pi);
end
在另一个脚本文件(model.m,和test.m在同一文件夹)中使用求解器函数,首先实验ode45。求解器函数的普通格式solver(‘微分方程文件’,‘自变量范围’,‘因变量的初始值’)
这里通过匿名函数限制自变量为t、因变量y(和test.m一致),分别设置
v
=
1
,
2
,
3
v = 1,2,3
v=1,2,3以求解数值解,因为求数值解的微分方程中不能出现未知参数。
同时,由于导弹路程最大
50
50
50单位,速度大小恒为
3
v
3v
3v,则时间
t
t
t最大为
50
3
v
\frac{50}{3v}
3v50
% 保存在model.m,和zztest在同一文件夹
for v = 1:3
[t1,y1] = ode45(@(t,y)zztest(t,y,v),[0,50/(3*v)],[0,0,20,0]);% [0,0,20,0]: 因为y是4行的列向量,所以初始值有4个
% 画图
subplot(1,3,v) %第1行第3列,第v个子图(v取1,2,3)
plot(y1(:,1),y1(:,2),'r--',y1(:,3),y1(:,4),'b') % y为未知(行)*4的向量;r--红色虚线
t = strcat('导弹追船 v=',num2str(v)); %字符串拼接
title(t)
legend('导弹路径','船路径','Location','Best') %Location:调整图例位置,这里设Best
end
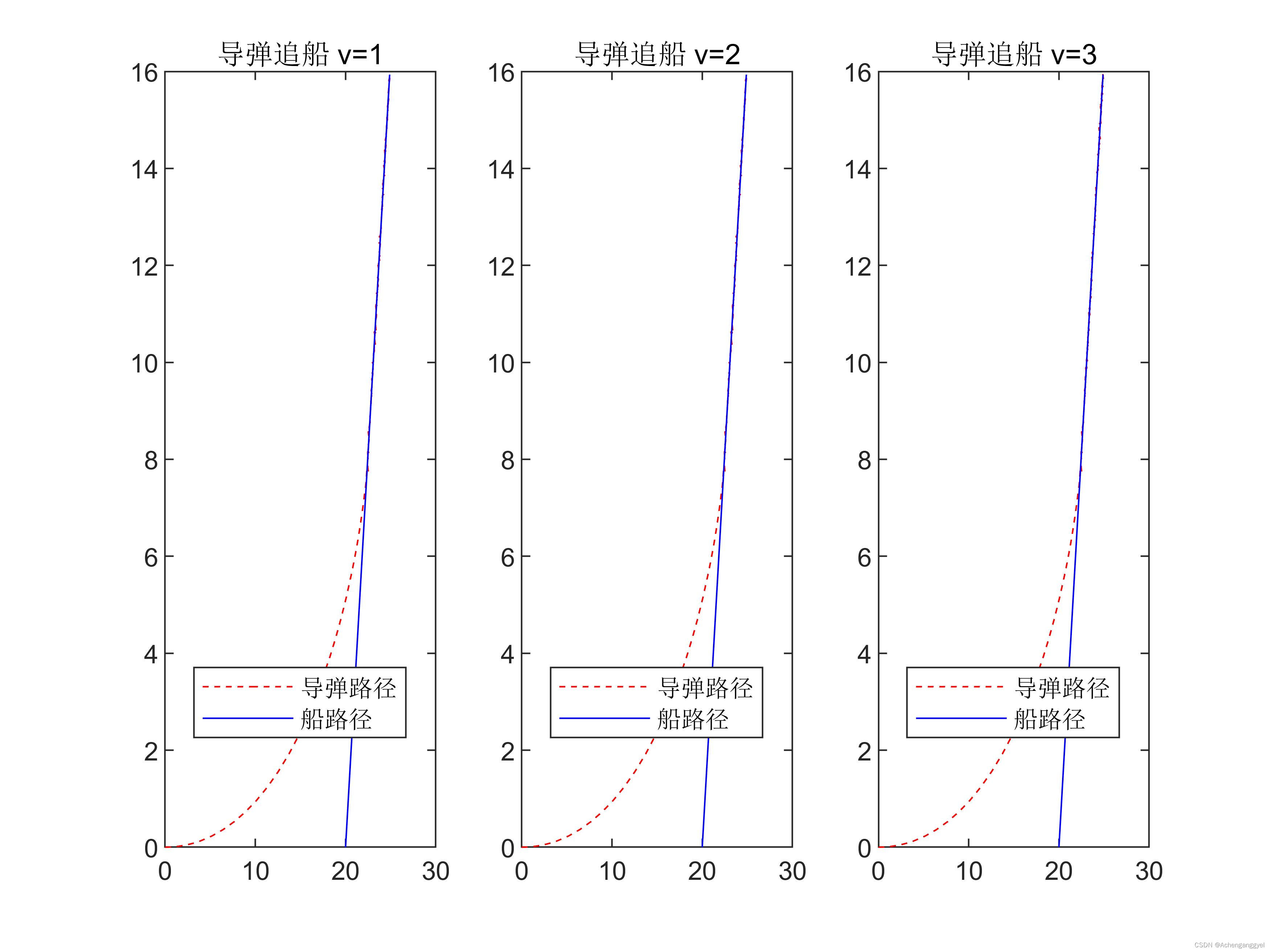
路径图如下
发现无论
v
v
v取何值,路径图都不改变。由于限制条件是导弹的路程小于50个单位,即
(
x
2
+
y
2
)
<
=
50
\sqrt{(x^2+y^2)} <= 50
(x2+y2)<=50,可以认为
v
v
v的取值不影响问题的求解。因此设
v
=
3
v=3
v=3
最后展示下
v
v
v在微分方程文件中赋值的写法
zztest_2t.m
% 微分方程过程
% 保存在zztest_2.m,和model.m在同一文件夹
function dy = zztest_2(t,y)
%导弹追击船
v = 1; % v是速度量
dy = zeros(4,1); %1,2是导弹的x,y,3,4是船的P,Q;最好用该方式表示多变量
dy(1) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(3)-y(1)); %左侧只能为导数dy形式,右侧不能出现导数
dy(2) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(4)-y(2));
dy(3) = v*cos(4/pi);
dy(4) = v*sin(4/pi);
end
model.m
% 调用求解器函数求解微分方程
% 保存在model.m,和zztest_2.m在同一文件夹
[t2,y2] = ode45('zztest_2',[0,50/(3*v)],[0,0,20,0]);
另,这里踩了一个坑,就是实时脚本无法复制代码…建议先用脚本写,之后再转实时脚本查看;或对文件美观有要求、想要即时函数提示的,可以用实时脚本写代码
3. 探讨导弹和船是否相撞
尽管路径图表明,后续导弹M和船N的路径重合。但我们不清楚时间相同时,M、N是否在同一点相遇
所以,这里通过代码验证
%% 判断导弹和船是否相撞
% 用t1,y1来判断
n = length(y1(:,1)); % n是该情况所有matlab求解的数值解
error = 1e-2; % 容许误差;因数值解是近似解而非真实解
% 误差太小会找不到,如1e-3就无输出
for i = 1:n
% 用导弹和船的距离来判断
d_MN= sqrt((y1(i,3)-y1(i,1)).^2+(y1(i,4)-y1(i,2)).^2);
if d_MN < error
words = ['时间: ',num2str(t1(i,1)), ' 位置x: ',num2str(y1(i,1)), ' 位置y: ', num2str(y1(i,2))];
disp(words);
break
end
end
运行结果

故可知导弹将击中船,且在一定误差范围内,导弹飞行时间2.8008秒,于(22.4589,8.0323)位置击中。
4. 代码整合
所有代码如下,在同一文件夹下。
zztest.m
function dy = zztest(t,y,v)
%导弹追击船
% v是速度量
% 其实可以写在这个文件内,但因为是自定义参数所以从求解过程中分离
% 如
% v = 1;
dy = zeros(4,1); %1,2是导弹的x,y,3,4是船的P,Q;最好用该方式表示多变量
dy(1) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(3)-y(1)); %左侧只能为导数dy形式,右侧不能出现导数
dy(2) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(4)-y(2));
dy(3) = v*cos(4/pi);
dy(4) = v*sin(4/pi);
end
zztest_2.m
function dy = zztest_2(t,y)
%导弹追击船
v = 1; % v是速度量
dy = zeros(4,1); %1,2是导弹的x,y,3,4是船的P,Q;最好用该方式表示多变量
dy(1) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(3)-y(1)); %左侧只能为导数dy形式,右侧不能出现导数
dy(2) = 3*v/sqrt((y(3)-y(1))^2+(y(4)-y(2))^2)*(y(4)-y(2));
dy(3) = v*cos(4/pi);
dy(4) = v*sin(4/pi);
end
model.m
%% 导弹追踪船问题
% 求解函数(两种参数设定) + 判断是否追击成功
%% 微分方程传参
for v = 1:3
[t1,y1] = ode45(@(t,y)zztest(t,y,v),[0,50/(3*v)],[0,0,20,0]);% [0,0,20,0]: 因为y是4行的列向量,所以初始值有4个
% 画图
subplot(1,3,v)
plot(y1(:,1),y1(:,2),'r--',y1(:,3),y1(:,4),'b') % y为未知(行)*4的向量;r--红色虚线
t = strcat('导弹追船 v=',num2str(v));
title(t)
legend('导弹路径','船路径','Location','Best') %Location:调整图例位置,这里设Best
end
%% 微分方程内部参数设置
[t2,y2] = ode45('zztest_2',[0,50/(3*v)],[0,0,20,0]);
%% 判断导弹和船是否相撞
% 用t1,y1来判断
n = length(y1(:,1)); % n是该情况所有matlab求解的数值解
error = 1e-2; % 容许误差;因数值解是近似解而非真实解
% 误差太小会找不到,如1e-3就无输出
for i = 1:n
% 用导弹和船的距离来判断
d_MN= sqrt((y1(i,3)-y1(i,1)).^2+(y1(i,4)-y1(i,2)).^2);
if d_MN < error
words = ['相撞时间: ',num2str(t1(i,1)), ' 位置x: ',num2str(y1(i,1)), ' 位置y: ', num2str(y1(i,2))];
disp(words);
break
end
end
四、一点废话
对于微分方程而言,难的不是求解,而是问题建模、方程化简、细节考虑。这么说是因为第一次画出图像的时候,发现和清风的大为不同…然后发现是微分方程的标准形式不规范
所以,这个建模问题,妙就妙在是道很简单的数学题,但本人却是才疏学浅、数学物理均堪忧的大学生(笑)

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









