








前言:
拖了很久很久很久很久的项目。。。零零散散的做着,也不能说啥成果也没有,但对于现在的我来说没啥用是确实,现在决定从头开始吧!算是给自己一个交代,当然我觉得还是可以做出来的,虽然在此之前经常中途放弃。。。但是,这次必然能succeed!奥利给,总结这系列文档也是当做监督自己的一种方式!
正文
直接进入正题:
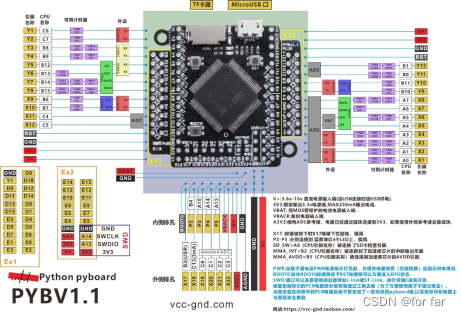
硬件:pyboard v1.1 (主控芯片:STM32F407VGT6)
软件:Python
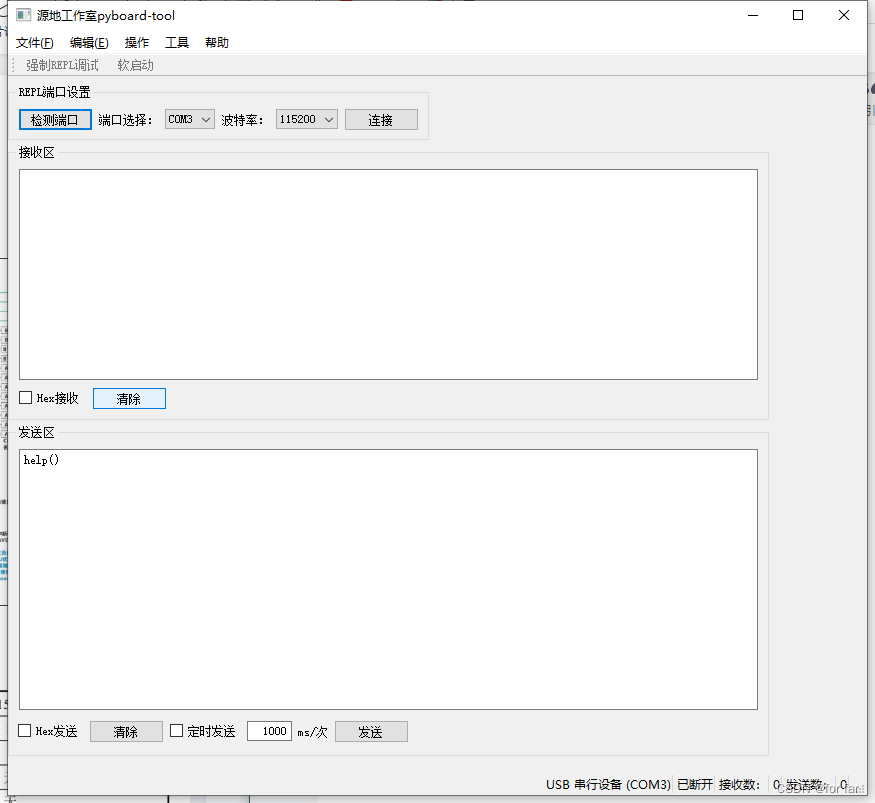
调试工具:YD-pyboard-tool

现在的car
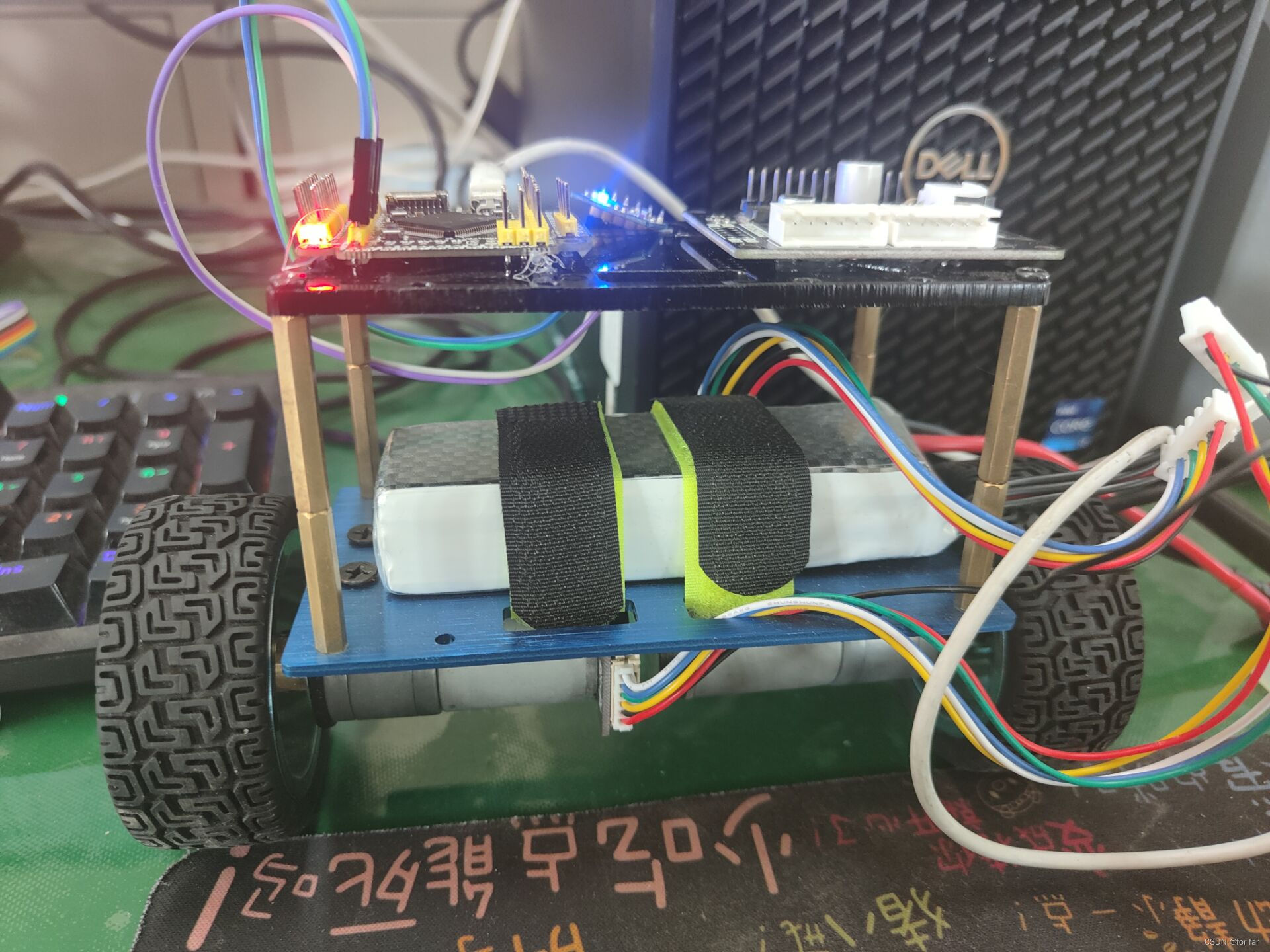

除了主控芯片(左一),还有两个主要的芯片分别是mpu6050(左二)、电机TB6612(左三)
芯片分布上还是存在问题的:
1. mpu6050位置没有固定,在后续测定机械中值时,必须固定
2. 电机通电接口和电池接口容易短路,后续需要通过其他手段稳定(还没想好。。。)
第一部分就先到这,写的很烂,但我自己看起来还可以hhhh
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









