






Keil软件的工程建立与应用
1.首先我们双击打开Keil软件

2.建立新的文件
3.我们单击保存

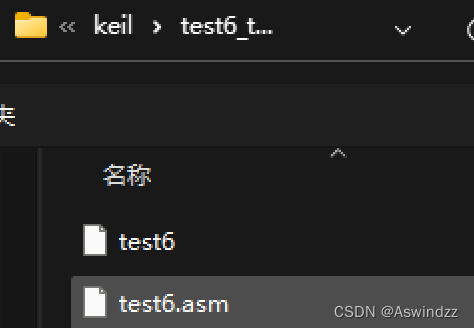
4.创建相应的文件夹并将该文件放置该文件夹目录下更名为asm后缀文件,如下图所示
5.单击Keil工程建议新的项目并将该项目保存到之前所建立的文件甲内

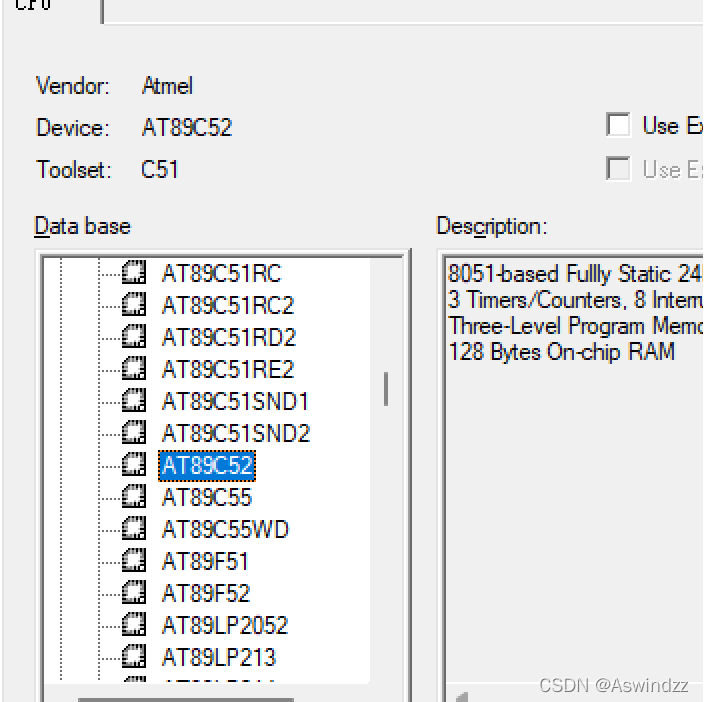
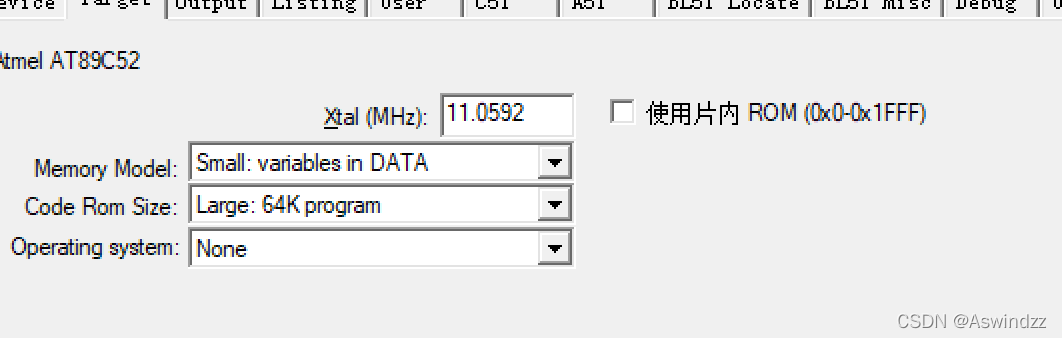
6.选择对应的芯片,我们以AT89C52为例
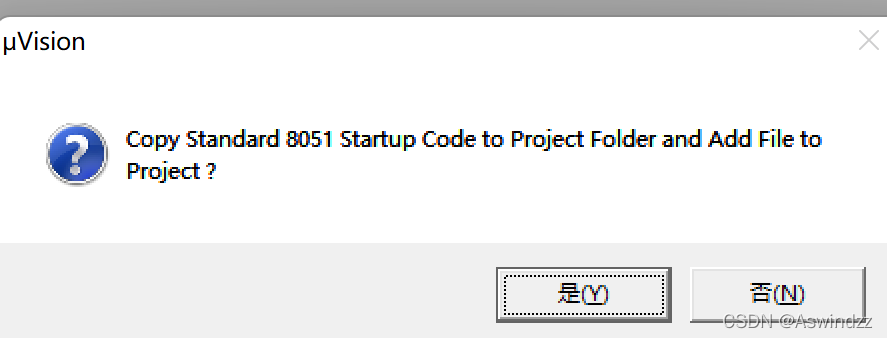
7.确认以后点击否,避免出现现阶段不必要的文件
8.将刚刚建立的asm文件找到添加到源组,至此我们完成了项目的建立
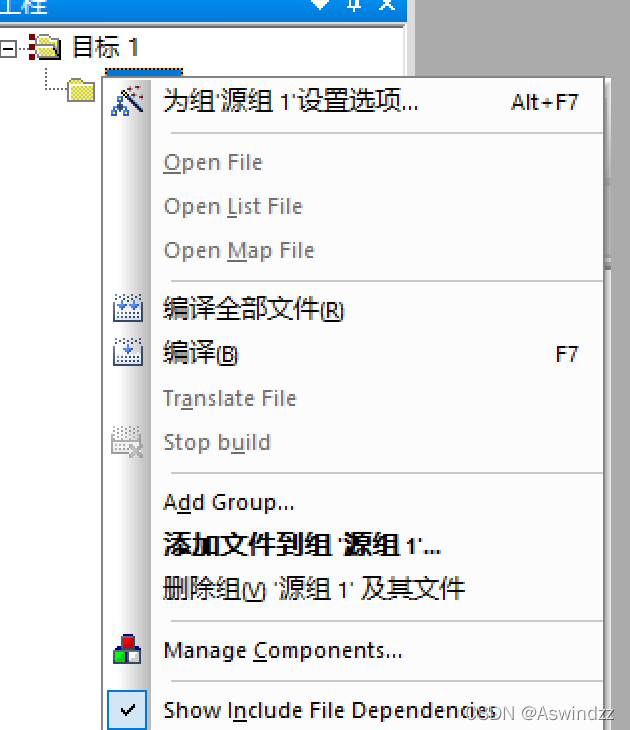
9.修改相关设置(以本实验为例),单击目标选择
a.将晶振更改为11.0592
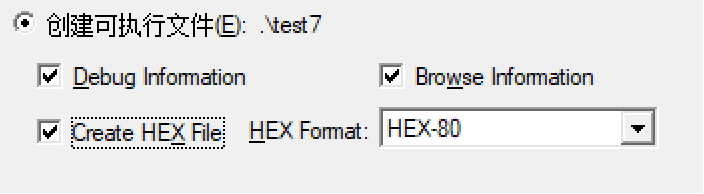
b.创建可执行性文件
c.限制速度为真实时间

点击确认,至此我们完成了本实验所有软件基本设置。
以上仅限于刚开始学习使用单片机,且在电脑上模拟操作基础上的流水灯教程。及其设置因各人而肯定有所不同。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









