




 本文探讨了在3D显示中利用深度缓冲区处理遮挡问题时,深度测试和深度偏移之间的冲突,并提供了解决方案。通过调整深度偏移值,可以有效避免z-fighting现象,确保绘制顺序正确。文中还通过实例代码展示了如何在OpenGL环境中实现这一解决方案。
本文探讨了在3D显示中利用深度缓冲区处理遮挡问题时,深度测试和深度偏移之间的冲突,并提供了解决方案。通过调整深度偏移值,可以有效避免z-fighting现象,确保绘制顺序正确。文中还通过实例代码展示了如何在OpenGL环境中实现这一解决方案。
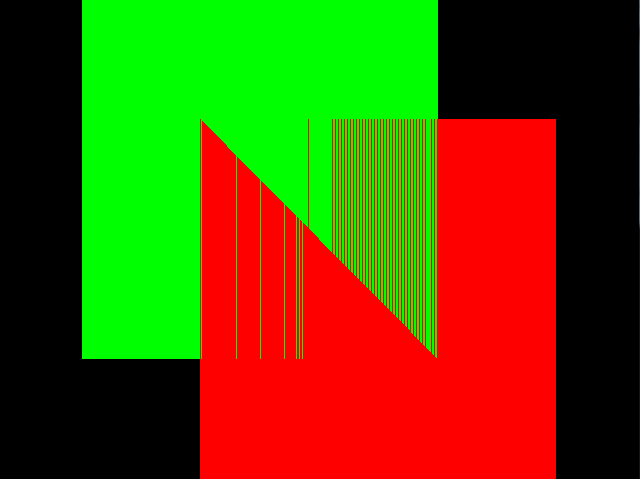
一般的3D显示都通过深度缓冲区来处理遮挡问题,这样的好处就是不管绘制顺序如何,最终总能得到相同的结果。但是深度缓冲区的精度是有限的(一般是每个像素采用16bit或者24bit来表示深度),如果两次绘制到同一个像素时,深度值相差非常小,就有可能无法正确的辨别究竟哪一次绘制的深度值更小,此时深度测试(GL_DEPTH_TEST)就出错了。
参考: http://en.wikipedia.org/wiki/Z-fighting
测试程序:
void display()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glEnable(GL_DEPTH_TEST);
g_rotate += 0.1;
glRotated(g_rotate, 0, 1, 0);
// glDisable(GL_POLYGON_OFFSET_FILL);//开启面的深度偏移
glColor3f(1.0f, 0.0f, 0.0f);
glRectf(-1.0f, -1.0f, 0.5f, 0.5f);
// glEnable(GL_POLYGON_OFFSET_FILL);
// glPolygonOffset(1.0f, 0.0f);
glColor3f(0.0f, 1.0f, 0.0f);
glRectf(-0.5f, -0.5f, 1.0f, 1.0f);
glutSwapBuffers();
glutReportErrors();
glutPostRedisplay();
}
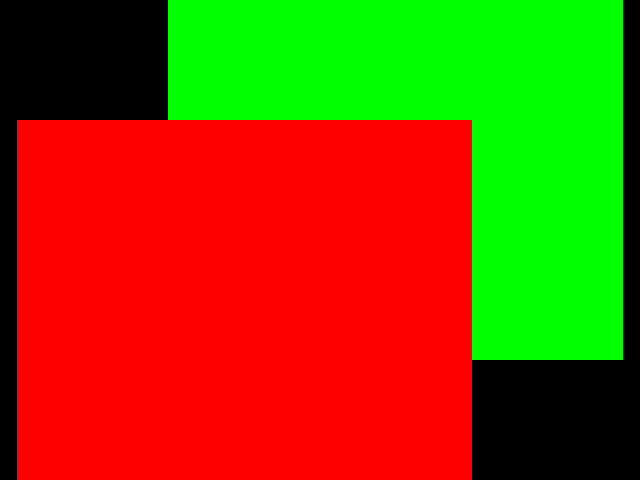
两个矩形在旋转时,就会出现如上wiki连接中所示的那种(错误的)效果。 如果把代码中的注释都打开,就成功的避免了z-fighting。
根据IBM文档的解释:
The value of the offset is factor * DZ + bias, where DZ is a measurement of the change in z relative to the screen area of the polygon. The offset is added before the Depth Test is performed and before the value is written into the Depth Buffer.
在进行深度测试和写入深度缓冲区之前,会把深度值加上一个offset。offset的计算公式是factor * DZ + bias,其中factor和bias是由glPolygonOffset指定,DZ似乎是深度的变化值相对屏幕的比值(这个不甚了解)。
参考: http://en.wikipedia.org/wiki/Z-fighting
测试程序:
void display()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glEnable(GL_DEPTH_TEST);
g_rotate += 0.1;
glRotated(g_rotate, 0, 1, 0);
// glDisable(GL_POLYGON_OFFSET_FILL);//开启面的深度偏移
glColor3f(1.0f, 0.0f, 0.0f);
glRectf(-1.0f, -1.0f, 0.5f, 0.5f);
// glEnable(GL_POLYGON_OFFSET_FILL);
// glPolygonOffset(1.0f, 0.0f);
glColor3f(0.0f, 1.0f, 0.0f);
glRectf(-0.5f, -0.5f, 1.0f, 1.0f);
glutSwapBuffers();
glutReportErrors();
glutPostRedisplay();
}
两个矩形在旋转时,就会出现如上wiki连接中所示的那种(错误的)效果。 如果把代码中的注释都打开,就成功的避免了z-fighting。
根据IBM文档的解释:
The value of the offset is factor * DZ + bias, where DZ is a measurement of the change in z relative to the screen area of the polygon. The offset is added before the Depth Test is performed and before the value is written into the Depth Buffer.
在进行深度测试和写入深度缓冲区之前,会把深度值加上一个offset。offset的计算公式是factor * DZ + bias,其中factor和bias是由glPolygonOffset指定,DZ似乎是深度的变化值相对屏幕的比值(这个不甚了解)。
注意这和直接的glTranslate偏移有一些区别。如果用glTranslate把两个矩形错开,也可以避免z-fighting,但是显示结果还是不同的。用glPolygonOffset的话,不论怎么旋转,总是红色遮住绿色;用glTranslate的话,开始是红色遮住绿色,旋转180度之后就是绿色遮住红色了。
#include <GL/glut.h>
GLfloat g_rotate = 0.0f;
int gwin = 0;
void render()
{
glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
glMatrixMode(GL_MODELVIEW);
glLoadIdentity();
glEnable(GL_DEPTH_TEST);
g_rotate += 0.1;
glRotated(g_rotate, 0, 1, 0);
// comment
glDisable(GL_POLYGON_OFFSET_FILL); //开启面的深度偏移
// comment
glColor3f(1.0f, 0.0f, 0.0f);
glRectf(-1.0f, -1.0f, 0.5f, 0.5f);
// comment
glEnable(GL_POLYGON_OFFSET_FILL);
glPolygonOffset(1.0f, 0.0f);
// comment
glColor3f(0.0f, 1.0f, 0.0f);
glRectf(-0.5f, -0.5f, 1.0f, 1.0f);
glutSwapBuffers();
glutReportErrors();
glutPostRedisplay();
}
void resize(int w, int h)
{
glViewport(0, 0, w, h);
glMatrixMode(GL_PROJECTION);
glLoadIdentity();
gluPerspective(45.f, (GLfloat)w / h, 0.1f, 100.f);
glMatrixMode(GL_MODELVIEW);
}
void init()
{
glClearColor(0.0f, 0.0f, 0.0f, 0.0f);
glClearDepth(1.0f);
glDepthFunc(GL_LESS);
glEnable(GL_DEPTH_TEST);
glShadeModel(GL_SMOOTH);
}
int main(int argc, char **argv)
{
glutInit(&argc, argv);
glutInitDisplayMode(GLUT_RGBA | GLUT_DEPTH | GLUT_DOUBLE);
glutInitWindowSize(640, 480);
gwin = glutCreateWindow("glPolygonOffset");
init();
glutReshapeFunc(resize);
glutDisplayFunc(render);
// glutIdleFunc(render);
glutMainLoop();
return 0;
}

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









