







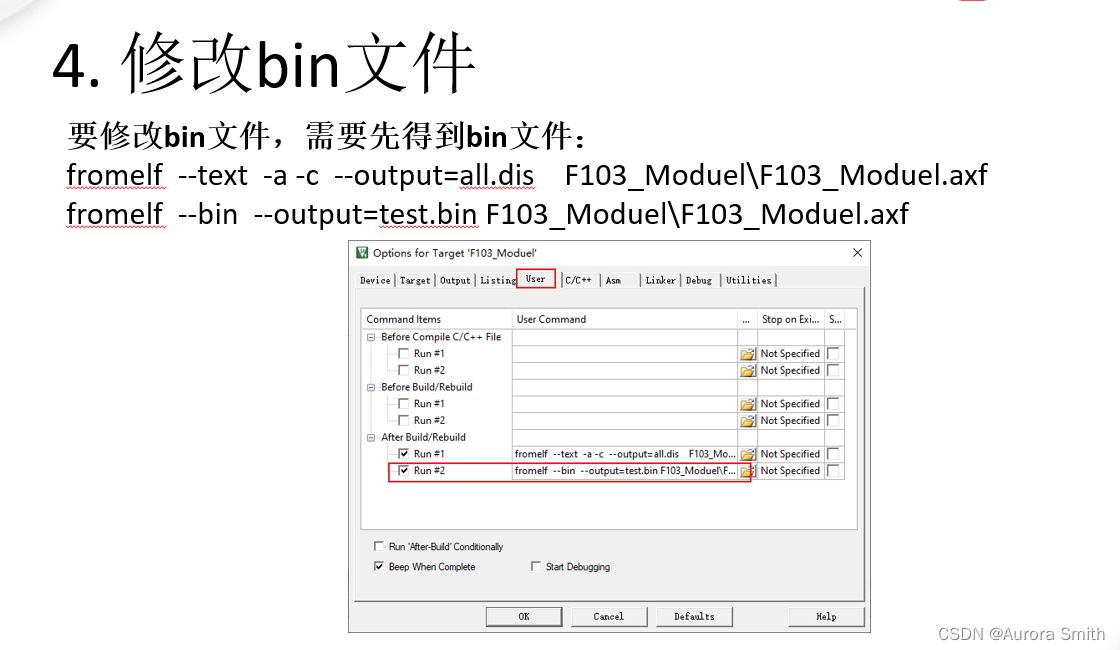
fromelf --text -a -c --output=all.dis F103_Moduel\F103_Moduel.axf
fromelf --bin --output=test.bin F103_Moduel\F103_Moduel.axf
在启动文件中,修改UsageFault_Handler
UsageFault_Handler\
PROC
; get current context
TST lr, #0x04 ; if(!EXC_RETURN[2])
ITE EQ
MRSEQ r0, msp ; [2]=0 ==> Z=1, get fault context from handler.
MRSNE r0, psp ; [2]=1 ==> Z=0, get fault context from thread.
STMFD r0!, {r4 - r11} ; push r4 - r11 register
STMFD r0!, {lr} ; push exec_return register
TST lr, #0x04 ; if(!EXC_RETURN[2])
ITE EQ
MSREQ msp, r0 ; [2]=0 ==> Z=1, update stack pointer to MSP.
MSRNE psp, r0 ; [2]=1 ==> Z=0, update stack pointer to PSP.
PUSH {lr}
BL rt_hw_hard_fault_exception
POP {lr}
ORR lr, lr, #0x04
BX lr
ENDP实现rt_hw_hard_fault_exception函数
#define rt_uint32_t unsigned int
struct exception_info
{
rt_uint32_t exc_return;
rt_uint32_t r4;
rt_uint32_t r5;
rt_uint32_t r6;
rt_uint32_t r7;
rt_uint32_t r8;
rt_uint32_t r9;
rt_uint32_t r10;
rt_uint32_t r11;
rt_uint32_t r0;
rt_uint32_t r1;
rt_uint32_t r2;
rt_uint32_t r3;
rt_uint32_t r12;
rt_uint32_t lr;
rt_uint32_t pc;
rt_uint32_t psr;
};
/*
* fault exception handler
*/
void rt_hw_hard_fault_exception(struct exception_info * exception_info)
{
unsigned int *app_sp;
int i;
app_sp = (unsigned int *)(exception_info + 1); /* context + 16*4 */
printf("psr: 0x%08x\r\n", exception_info->psr);
printf("r00: 0x%08x\r\n", exception_info->r0);
printf("r01: 0x%08x\r\n", exception_info->r1);
printf("r02: 0x%08x\r\n", exception_info->r2);
printf("r03: 0x%08x\r\n", exception_info->r3);
printf("r04: 0x%08x\r\n", exception_info->r4);
printf("r05: 0x%08x\r\n", exception_info->r5);
printf("r06: 0x%08x\r\n", exception_info->r6);
printf("r07: 0x%08x\r\n", exception_info->r7);
printf("r08: 0x%08x\r\n", exception_info->r8);
printf("r09: 0x%08x\r\n", exception_info->r9);
printf("r10: 0x%08x\r\n", exception_info->r10);
printf("r11: 0x%08x\r\n", exception_info->r11);
printf("r12: 0x%08x\r\n", exception_info->r12);
printf(" lr: 0x%08x\r\n", exception_info->lr);
printf(" pc: 0x%08x\r\n", exception_info->pc);
printf("stacks: \r\n");
i = 0;
for (i = 0; i < 1024; )
{
printf("%08x ", *app_sp);
app_sp++;
i++;
if (i % 16 == 0)
printf("\r\n");
}
printf("\r\n");
while (1);
}The SHCSR enables the system handlers,这个函数作用就是使能UsageFault
void UsageFaultInit(void)
{
SCB->SHCSR |= (SCB_SHCSR_USGFAULTENA_Msk);
}main.c中
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "driver_usart.h"
#include "driver_key.h"
#include <stdio.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void MX_FREERTOS_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
ring_buffer test_buffer;
static void A(void);
static void B(char *buf);
static int C(int b);
static void A(void)
{
volatile int val = 1;
//volatile int val2 = 1;
char buf[16];
B(buf);
C(val);
}
static void B(char *buf)
{
strcpy(buf, "192.168.100.106 ");
}
static int C(int b)
{
return 100/b;
}
static void D(void)
{
printf("Enter D()\r\n");
C(1);
printf("Exit D()\r\n");
}
void UsageFaultInit(void)
{
SCB->SHCSR |= (SCB_SHCSR_USGFAULTENA_Msk);
}
void TestDebug(void)
{
/* 100ask add */
/* 使能除0错误
* CCR(0xE000ED14)的bit4(DIV_0_TRP)设置为1
*/
volatile int *CCR = (volatile int *)0xE000ED14;
*CCR |= (1<<4);
UsageFaultInit();
A();
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART3_UART_Init();
/* USER CODE BEGIN 2 */
KEY_GPIO_ReInit();
ring_buffer_init(&test_buffer);
EnableDebugIRQ();
printf("Hello World!\r\n");
TestDebug();
/* USER CODE END 2 */
/* Init scheduler */
osKernelInitialize(); /* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM8 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM8) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











