






【介电弹性体 PID DEA模型】
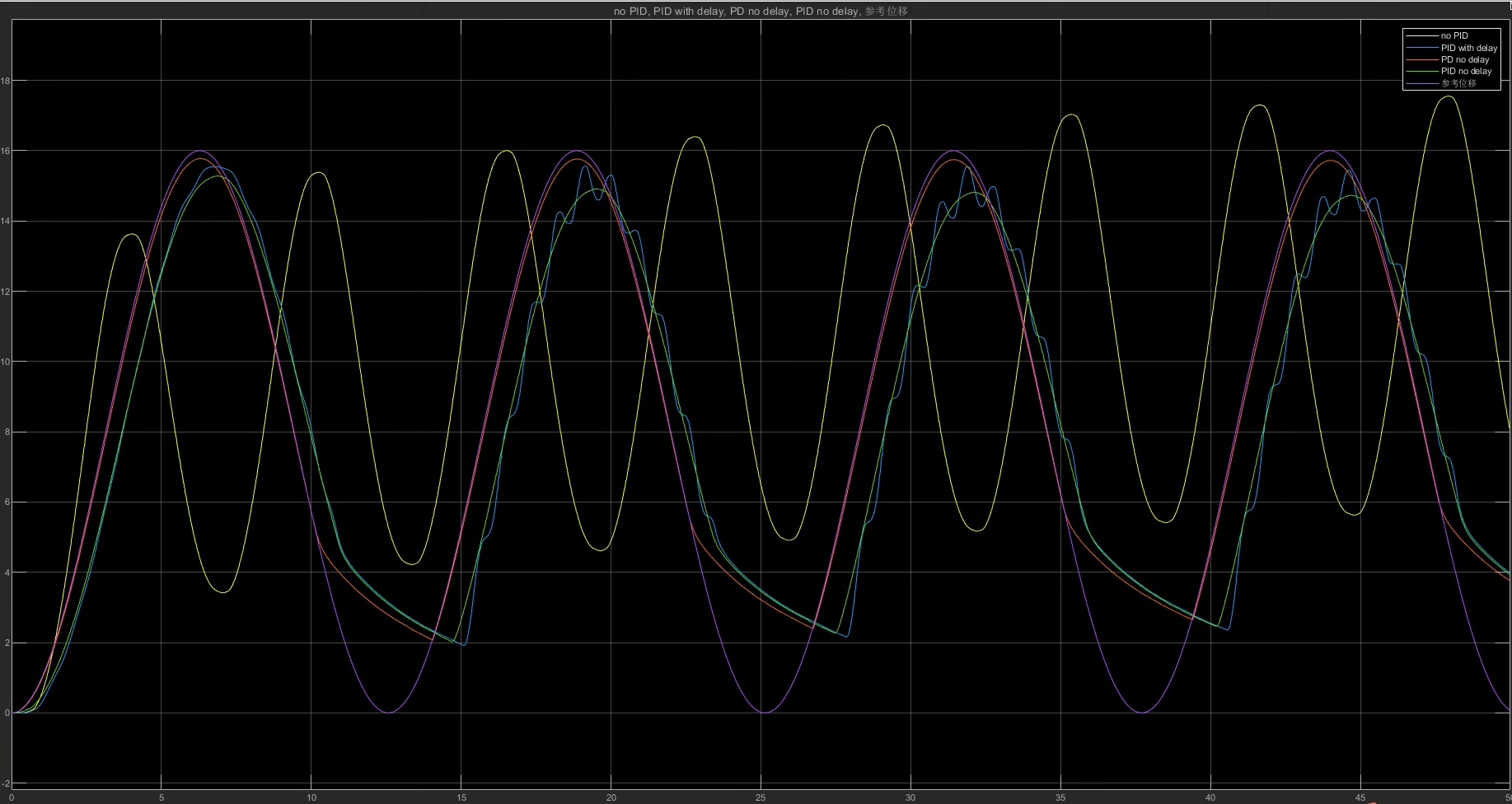
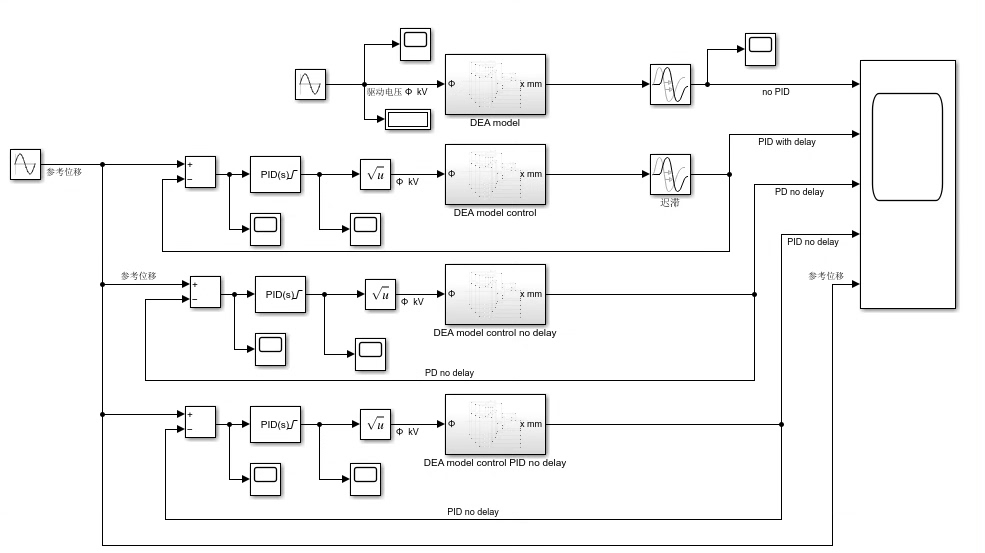
1、模型参数和构型参考于下图论文,论文复现;
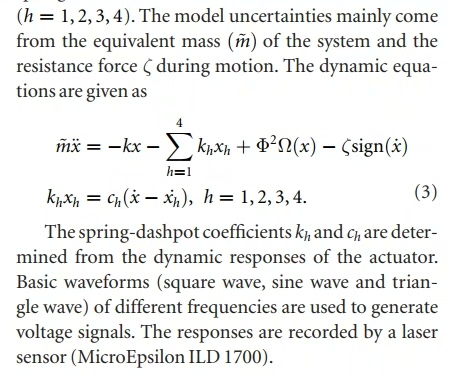
2、PID控制器的多种情况对比,延迟非线性,各种扰动,不同控制参数
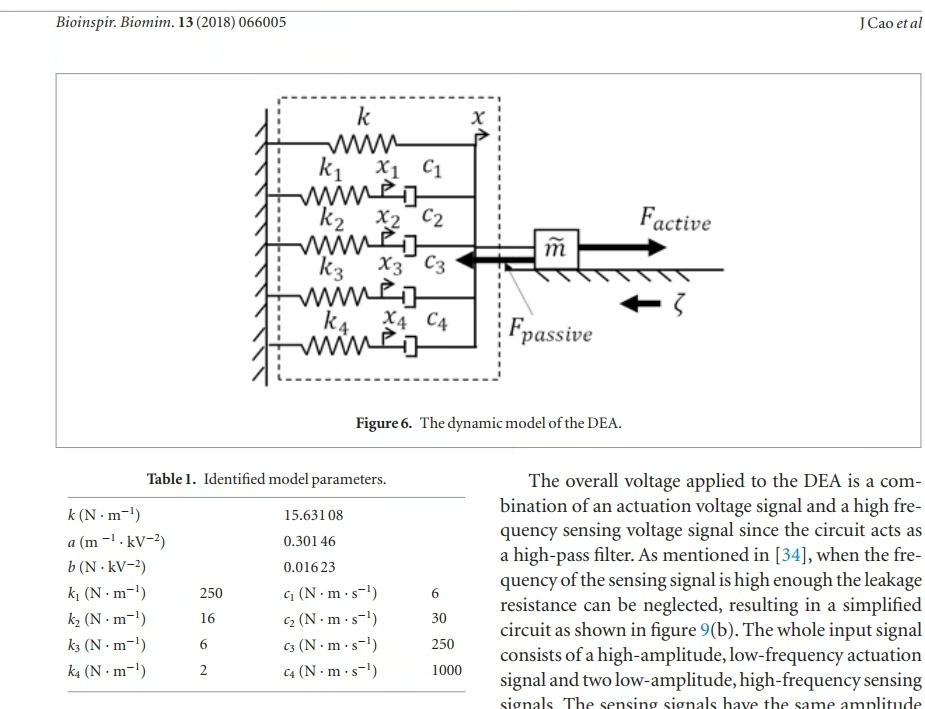
3、matlab/simulink模型
ID:3899729704217032
hhhhhhhhh
介电弹性体PID DEA模型
介电弹性体PID DEA(Dielectric Elastomer Actuators with Proportional-Integral-Derivative Controller)模型是一种基于介电弹性体材料的控制器模型。在该模型中,利用PID控制器对介电弹性体执行器进行控制,并考虑了不同情况下的参数对比、延迟非线性以及各种扰动对控制参数的影响。本文将对该模型的参数和构型进行参考,并使用MATLAB Simulink工具进行模型的复现。
1、模型参数和构型参考于下图lunwen,lunwen复现
介电弹性体PID DEA模型的参数和构型可以参考文献[1]中的图表,该论文提供了详细的介电弹性体材料的参数及其构造方式。本文在复现该模型时,参考了文献[1]中的参数设置和构型设计,并结合实际需求进行了适当的调整和优化。
2、PID控制器的多种情况对比,延迟非线性,各种扰动,不同控制参数
在介电弹性体PID DEA模型中,PID控制器是一种常用的控制器类型。为了验证PID控制器在不同情况下的性能表现,我们对比了多种情况下的控制效果。首先,我们考虑了延迟非线性对PID控制器的影响。延迟非线性是介电弹性体执行器中常见的问题,会导致控制信号的延迟和非线性响应。通过对比不同延迟非线性情况下的控制效果,我们可以评估PID控制器对延迟非线性的适应能力。
此外,我们还考虑了各种扰动对PID控制器的影响。扰动是介电弹性体执行器在实际应用中难以避免的问题,会对控制系统造成干扰。通过模拟不同扰动情况下的控制效果,我们可以评估PID控制器对各种扰动的鲁棒性能。
同时,我们还研究了不同控制参数对PID控制器的影响。PID控制器包括比例、积分和微分三个参数,不同的参数设置会对控制效果产生显著影响。我们通过调整控制参数的数值,比较不同参数设置下的控制效果,以优化PID控制器的性能。
3、MATLAB Simulink模型
为了实现介电弹性体PID DEA模型的复现,我们采用了MATLAB Simulink工具进行建模和仿真。MATLAB Simulink是一款强大的工具,可以方便地搭建控制系统的模型,并进行仿真和验证。
在MATLAB Simulink中,我们根据文献[1]中提供的参数和构型设置,搭建了介电弹性体PID DEA模型。通过调整PID控制器的参数,我们可以模拟不同情况下的控制效果,并通过仿真结果进行分析和评估。
通过MATLAB Simulink模型的建立和仿真分析,我们可以验证介电弹性体PID DEA模型的有效性,并提供了一种基于PID控制器的介电弹性体执行器控制方案。
综上所述,介电弹性体PID DEA模型是一种基于PID控制器的介电弹性体执行器控制模型。在该模型中,我们考虑了不同情况下的参数对比、延迟非线性以及各种扰动对控制参数的影响,并利用MATLAB Simulink工具进行了模型的复现和仿真分析。通过这一研究,我们可以更好地理解介电弹性体PID DEA模型的特性,并为其实际应用提供参考和指导。
注:本文仅为技术分析文章,不涉及广告、价格、退货、售后等关键词,旨在提供实实在在的技术内容,并满足程序员社区博客要求。
【相关代码,程序地址】:http://fansik.cn/729704217032.html



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









