







 本文介绍了一种基于计算机视觉和深度学习的汽车线束胶套检测与测量系统,该系统通过图像处理和深度学习模型进行胶套定位,结合自适应权重分布的全采样测量方法,实现精确测量。现场实验表明,该系统具有高检出率和低测量误差,验证了其稳定性和鲁棒性。
本文介绍了一种基于计算机视觉和深度学习的汽车线束胶套检测与测量系统,该系统通过图像处理和深度学习模型进行胶套定位,结合自适应权重分布的全采样测量方法,实现精确测量。现场实验表明,该系统具有高检出率和低测量误差,验证了其稳定性和鲁棒性。
0 引言
略。
1 系统硬件构成
略。
2 图像处理系统及实现原理
通过图像采集系统获得汽车线束各部分图像后,使用 Halcon 图像算法库对图像进行中值滤波、图像增强等预处理; 然后对预处理得到的图像进行特征点提取,进而实现多位置图像的拼接。
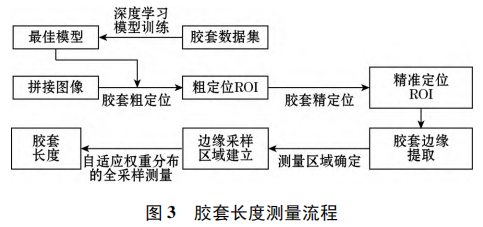
图像拼接完成后,基于拼接图像进行胶套检测与测量工作,其长度测量算法流程如图 3 所示。首先通过深度学习最佳训练模型对图像中的多个胶套进行粗定位并记录胶套数量,然后生成对应的ROI,再分别对其进行形态学处理,精准定位ROI中的胶套。然后通过自适应阈值设定法确定每个ROI中提取胶套边缘应该选择的阈值,确定边缘后通过自适应权重分布的全采样测量方法对胶套进行长度测量。
2.1 图像拼接
2.1.1 图像特征点提取
使用 Halcon 算法库对图像进行特征点提取。特征点即图像中与周围像素点在颜色、亮度等特征上存在明显不同的像素点[9]。计算平滑矩阵
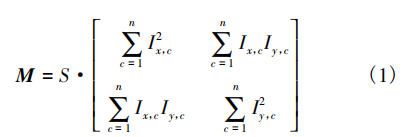
式中: Ix,c和 Iy,c为图像每个通道的一阶导数值; S 为平滑系数。
矩阵 M 的迹 Trace( M) 即为不均匀度,矩阵 M 的行列式值为 Det ( M) ,则图像像素点的各向同性程度为

从中选择出不均匀度和各向同性程度分别在设定阈值内的点即为特征点。
2.1.2 特征点匹配
特征点提取完成后,将特征点作为输入,寻找对应特征点之间的变换关系。
首先,确定两张图像输入点周围掩模窗口的灰度值相关性,并通过掩模窗口相似性实现两张图像间的初始匹配; 然后在上述初始约束条件下,使用 RANSAC 算法找到使对应特征点匹配数量最大化的投影变换矩阵,将变换矩阵应用到图像整体,即可实现 2 张图像的拼接。
多张图像可视为每相邻两图像的特征点提取及匹配,多次应用上述算法即可实现多张图像的依次拼接。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









