










 本文围绕基于51单片机的GPS定位系统展开,介绍了系统方案选择与论证,涵盖总体设计、功能说明及模块设计。阐述了硬件设计,包括主控芯片、复位、晶振等电路,以及软件设计,采用C语言和keil开发。经测试,系统可在室外准确实现定位和时间查询功能。
本文围绕基于51单片机的GPS定位系统展开,介绍了系统方案选择与论证,涵盖总体设计、功能说明及模块设计。阐述了硬件设计,包括主控芯片、复位、晶振等电路,以及软件设计,采用C语言和keil开发。经测试,系统可在室外准确实现定位和时间查询功能。
摘要
GPS(Global Positioning System,全球定位系统),是一个由24颗卫星组成的卫星系统。可以保证在任意时刻,任何地点都同时检测到4颗卫星,以保证卫星可以采集到该观测点的经纬度和高度,从而实现导航、定位、授时等功能。现在在很多领域都有用到GPS技术,比如可以用来引导汽车、飞机、船舶以及个人准确的到达目的地,本文就是以保证个人的安全、准确出行研究的GPS定位系统,设计制作一个单片机系统,单片机系统由电源电路、晶振电路、复位电路、LCD驱动电路等组成,此系统用以读取GPS模块的数据并处理,最后显示在LCD12864上面,用户可以实时通过读取12864显示的内容了解自己的位置以及当前时间,同时由于用到有单片机,以后还可以在上面加很多想要的功能,是一个可扩展、很具有使用价值的系统。
关键词:GPS;单片机;12864
1、 系统方案选择和论证
1.1、引言
GPS 是英文Global Positioning System(全球定位系统)的简称,而其中文简称为“球位系”。GPS起始于1958年美国军方的一个项目,1964年投入使用。是20世纪70年代由美国陆海空三军联合研制的新一代空间卫星导航定位系统 。其主要目的是为陆、海、空三大领域提供实时、 全天候和全球性的导航服务,并用于情报收集、核爆监测和应急通讯等一些军事目的。经过20余年的研究实验,耗资300亿美元,到1994年,全球覆盖率高达98%的24颗GPS卫星星座己布设完成。随着人民生活水平的发展,GPS技术被越来越多的应用在个人PDA、个人车载终端、手机等设备上。人们通过GPS,能准确知道自己所在的位置,从实现到导航、确定旅游路线、获取地理信息等功能。本文介绍的GPS导航系统,以单片机作为主控芯片,配以GPS、12864显示屏,构建了一个GPS信息显示的系统。本系统在一定程度上推动了GPS导航设备研究的发展。
1.2 方案说明
1.2.1、 总体设计方案
个人手持设备要求是功耗要足够低、操作简单、界面美观、方便观看。
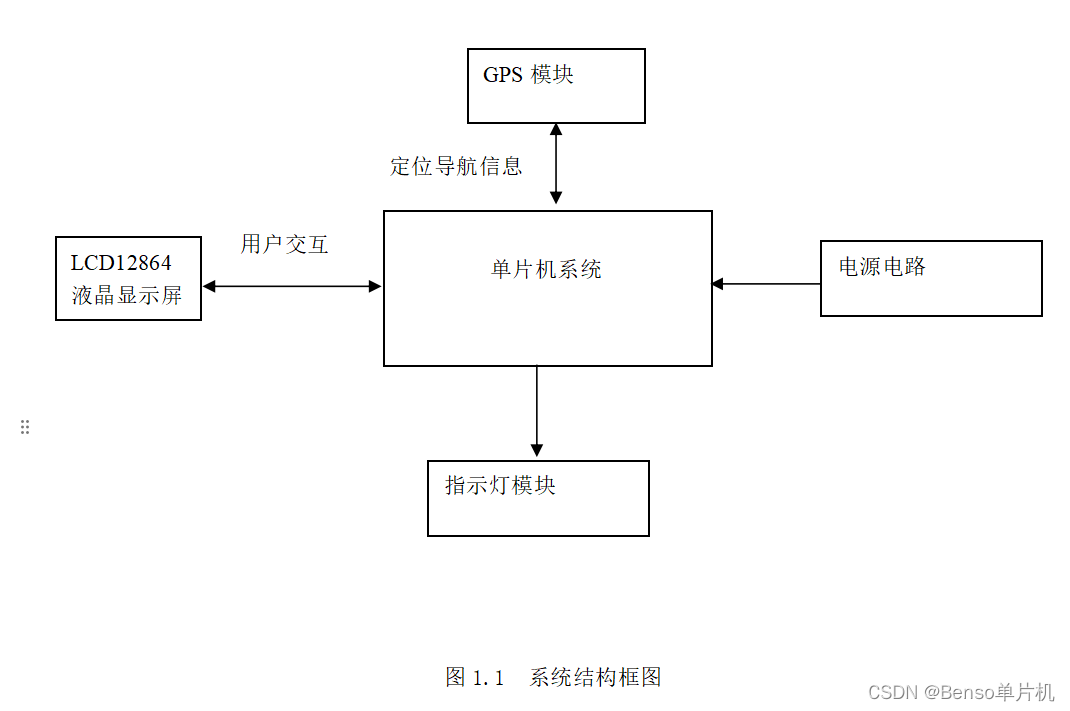
为完成相应功能,本设计提出的方案如图1.1所示。系统包括以下几个基本模块:电源模块、主控模块、显示模块、GPS定位模块。GPS模块负责接收卫星信息,单片机模块负责读取GPS模块数据并处理,显示模块主要负责将GPS模块接收到的数据显示出来供用户随时观看。
1.2.2、 系统功能说明
(1).定位功能
GPS通过接收卫星信号,可以准确地定出其所在的位置,位置误差小于10米。利用GPS,在12864上面显示当前位置。
(2).查询时间功能
GPS还可以接收卫星发下来的时间信息,利用单片机控制12864显示出当前时间,用户可以很方便的了解时间。
1.3、 部分模块设计方案
1.3.1、 控制模块设计方案
单片机最小系统由晶振电路、复位电路、电源电路等组成
1.3.2、 显示电路设计方案
本项目选用LCD12864作为显示屏,电路简单,选用并行通信方式
1.3.3、 GPS模块选择方案
方案一:采用串口接口GPS模块。优点:便于驱动,程序简单,价格便宜。缺点:体积较大。
方案二:采用usb接口GPS模块。优点:便于携带。缺点:驱动相对较难、价格相对较贵。
1.4、总体方案确定
1.4.1、系统硬件方案
表1.1系统硬件方案
| 名称 | 说明 |
| CPU | AT89S52单片机 |
| 显示屏 | LCD12864 |
| GPS模块 |
1.4.2、软件需求
表1.2 软件需求
| 名称 | 说明 |
| 开发语言 | C语言 |
| 开发工具 | keil |
2、 系统的硬件设计与实现
系统硬件特性如下图:

该系统是用手工做的腐蚀板,成本很低,性能稳定,同时用LCD12864作为显示屏显示位置及时间等信息,显示的容量大数据量小,一个页面可以显示8*4个汉字或16*4个字符。
2.1、 主控芯片电路
主控芯片为AT89S52,该芯片性能稳定、工艺精良。
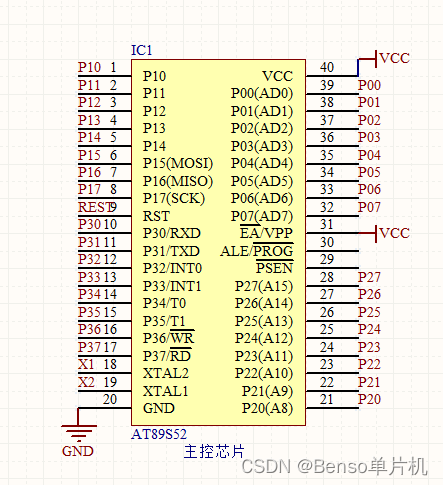
图2.1为主控芯片电路,AT89S52是一种低功耗、高性能CMOS 8位微控制器,具有8K 在系统可编程Flash 存储器。使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51 产品指令和引脚完全兼容。片上Flash允许程序存储器在系统可编程,亦适于常规编程器。在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得AT89S52在众多嵌入式控制应用系统中得到广泛应用,这里采用AT89S52单片机作为控制芯片,实现了成本低,开发简单等特点。
2.2、 复位电路
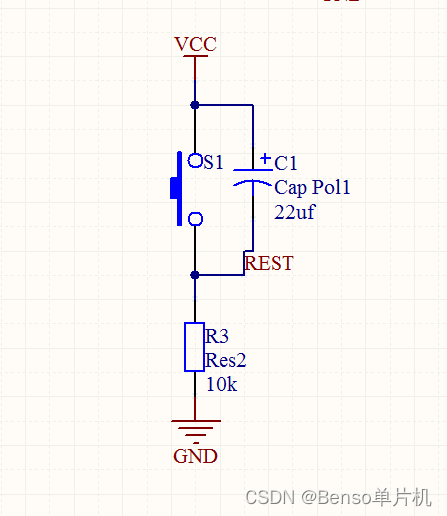
图2.2 复位电路电路
图2.2为系统复位电路,为确保系统中电路稳定可靠工作,复位电路是必不可少的一部分,复位电路的第一功能是上电复位。一般单片机电路正常工作需要供电电源为5V±5%,即4.75~5.25V。由于单片机电路是时序数字电路,它需要稳定的时钟信号,因此在电源上电时,只有当VCC超过4.75V低于5.25V以及晶体振荡器稳定工作时,复位信号才被撤除,单片机电路开始正常工作。这种复位电路的工作原理是:VCC上电时,C1充电,在10K电阻上出现电压,使得单片机复位;几个毫秒后,C1充满,10K电阻上电流降为0,电压也为0,使得单片机进入工作状态。工作期间,按下S1,C1放电。S1松手,C1又充电,在10K电阻上出现电压,使得单片机复位。几个毫秒后,单片机进入工作状态
2.3、 晶振电路
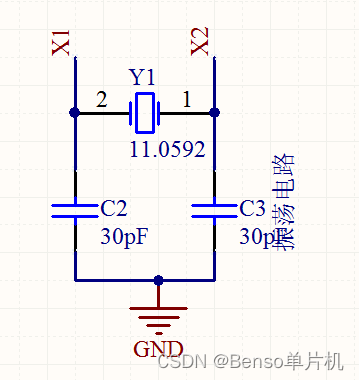
图2.3 晶振电路
图2.3为震荡电路,每个单片机系统里都有晶振,全称叫晶体震荡器,在单片机系统里晶振的作用非常大,它结合单片机内部的电路,产生单片机所必须的时钟频率,单片机的一切指令的执行都是建立在这个基础上的,晶振的提供的时钟频率越高,那单片机的运行速度也就越快,如图,在晶振两边添加两个30pF(27--33pF)电容,使震荡更加稳定。震荡电路接在AT89S52单片机的18、19两个引脚上,给单片机提供震荡信号
2.4、 电源电路
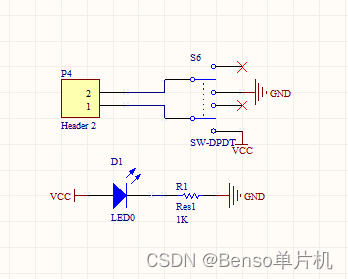
图2.3 电源电路
图2.3为电源电路,用的是六脚开关控制电源通断,同时控制了电源的正负极,安全方便,同时有一个电源指示灯,上面加有一个1K的限流电阻。该电路实现了对系统的电源控制,同时显示了电路的状态,方便大家操作。
2.5、 显示电路
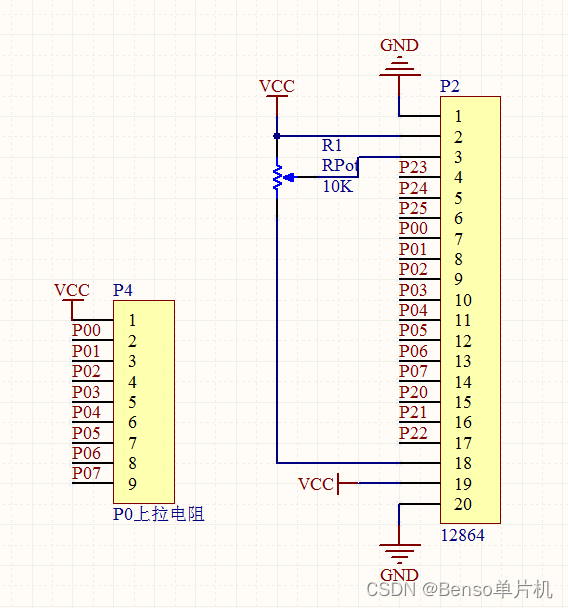
图2.4 显示电路
图2.4为12864显示电路,该12864的数据口用的AT89S52的P0口,由于P0口内部没有加上拉电阻,需外接10K的上拉电阻,才能保证数据的正常传输。12864的3脚为背光调节的引脚,当3脚的电压不同时背光的亮度就不同,这里设计了一个电路来调节3脚的电压,就是利用一个滑动变阻器一个脚接电源电压,一个脚接地,调节滑动变阻器就可以改变中间那个引脚的电压,我们只需将中间那个引脚和12864的3脚相连接就行了。
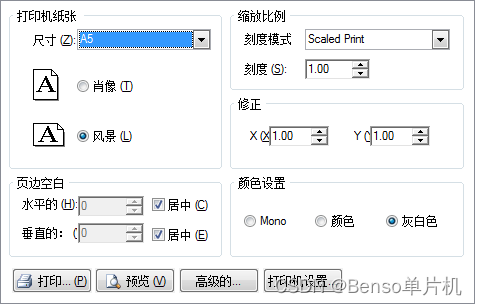
2.7 电路图的打印
由于采用的是曝光显影法制作电路板,故打印电路图前,要先对电路图进行打印设置。
由于我们是制作单面板,多余的线路可用跳线连接。打印前,先进行页面设置,具体设置参数如图2.6.1所示,在Mechanical层放置填充方块,覆盖整个电路图。然后进行打印设置:
点击文件,打印设置,然后点击高级选项,在高级选项中选择将要打印的层,本系统中需打印的层如图2.6.2所示:
然后点击左下角的特性设置各层的打印颜色。Bottom Layer 设置为白色,Mechanical层设置为黑色,Multi-Layer设置成白色。设置好后,将打印比例设置为1.0即可进行打印,打印时要注意用硫酸纸或菲林纸,我们是将线布在底层,打印可以选择镜像打印,就是将图2.6.2中Mirror这个选项勾上,到时候正面曝光,也可以将就按照图2.6.2设置,曝光时就背面曝光。
3、 系统的软件设计
3.1、系统概述
本系统的所有程序均采用C语言编写,开发工具为keil,开发环境为windows。应用软件开发的模块化思想来开发这个项目,程序定义了许多子程序来分别管理各个模块,通过对各个子程序的操作,来构建整个程序框架。各个子程序即可单独提取出作为独立的一个有机代码,大大增加了项目的健壮性及可移植性。
3.2、软件详细设
3.2.1 头文件
本系统写了很多头文件,里面包含了很多子模块的信息,各个子模块相互分开,加大了项目的可移植性,如在其它的项目中要使用这些子模块,只需要将C文件和H文件复制过去就行了。包含的头文件如下:
#include <reg52.h>
#include <stdio.h>
#include <string.h>
#include "GPS.h"
#include "LCD.h"
#include "display.h"3.2.2、系统IO定义
整个系统用到了很多独立的IO,在控制12864的读写中要定义几个IO,在控制GPS模块的数据传输中都要用到单片机IO,具体定义IO情况如下:
3.2.3、主函数
主函数,项目入口,用于启动其他模块,并在屏幕上显示主界面窗口,主函数具体如下:
/****************************************
主函数
/****************************************/
void main(void)
{
uchar error_num = 0;
Uart_Init(); //初始化串口
Lcd_Init(); //初始化LCD
GPS_Init(); //初始化GPS
rev_stop=0;
REV_NO;
while(1)
{
if (rev_stop) //如果接收完一行
{
TR0 = 1; //开启定时器
REV_YES;
if (change_page % 2 == 1) //换页
{
if (GPS_GGA_Parse(rev_buf, &GPS)) //解析GPGGA
{
GGA_YES;
GPS_DisplayTwo(); //显示第二页信息
error_num = 0;
gps_flag = 0;
rev_stop = 0;
REV_NO;
}
else
{
error_num++;
if (error_num >= 20) //如果数据无效超过20次
{
GGA_NO;
error_num = 20;
GPS_Init(); //返回初始化
}
gps_flag = 0;
rev_stop = 0;
REV_NO;
}
}
else
{
if (GPS_RMC_Parse(rev_buf, &GPS)) //解析GPRMC
{
RMC_YES;
GPS_DisplayOne(); //显示GPS第一页信息
error_num = 0;
gps_flag = 0;
rev_stop = 0;
led1 = 1;
}
else
{
error_num++;
if (error_num >= 20) //如果数据无效超过20次
{
RMC_NO;
error_num = 20;
GPS_Init(); //返回初始化
}
gps_flag = 0;
rev_stop = 0;
REV_NO;
}
}
}
}
}由于GPS与单片机通信是选用的串口,在程序中首先初始化了串口,在初始化了LCD12864,然后初始化GPS,做好了准备工作后,就一直等待从GPS接收数据。
3.2.4、延时子函数
在整个系统中都要用到延时函数,这个时间的取定决定这整个系统的工作效率,如果延时时间短了就会造成LCD12864显示不正常,还有就是GPS数据传输不成功;但是延时时间过长又会导致系统的效率低下,所以一个准确的延时函数是很重要的,具体的延时函数如下:
void delay(uint z)
{
uint x, y;
for (x = z; x > 0; x--)
for(y = 110; y > 0; y--);
}
void timer0(void) interrupt 1
{
static uchar count = 0;
TH0 = 0x3c;
TL0 = 0xb0;
count++;
if (count == 200) //2*5秒钟
{
count = 0;
change_page++; //换页
if (change_page == 10)
change_page = 0;
}
} 上面是一个延时1ms(晶振为11.0592M)的函数下面是一个中断函数,用于12864显示用的。
3.2.5、12864子模块
12864的显示函数,先要写地址,然后在写数据,在这个过程前还要检测12864是否忙,就是是否在接收上次的数据,具体的函数如下:
#ifndef __LCD_H_
#define __LCD_H_
#include <reg52.h>
#include <intrins.h>
#define uchar unsigned char
#define uint unsigned int
#define LCD_data P2 //数据口
sbit LCD_RS = P0^7; //寄存器选择输入
sbit LCD_RW = P0^6; //液晶读/写控制
sbit LCD_EN = P0^5; //液晶使能控制
sbit LCD_PSB = P0^4; //串/并方式控制
#define DelayNOP(); {_nop_();_nop_();_nop_();_nop_();};
void clr_screen();
void delay(uint z);
void Lcd_WriteCmd(uchar cmd);
void Lcd_WriteDat(uchar dat);
void Lcd_Init(void);
void Lcd_SetPos(uchar X,uchar Y);
void Lcd_DispLine(uchar line, uchar pos, uchar *str);
#endif //__LCD_H_
#include "LCD.h"
void delay(uint z)
{
uint x, y;
for (x = z; x > 0; x--)
for(y = 110; y > 0; y--);
}
void clr_screen()
{
Lcd_WriteCmd(0x34); //扩充指令操作
delay(5);
Lcd_WriteCmd(0x30); //基本指令操作
delay(5);
Lcd_WriteCmd(0x01); //清屏
delay(5);
}
static bit Lcd_Busy(void)
{
bit result;
LCD_RS = 0;
LCD_RW = 1;
LCD_EN = 1;
DelayNOP();
result = (bit)(P0&0x80);
LCD_EN = 0;
return(result);
}
void Lcd_WriteCmd(uchar cmd)
{
LCD_RS = 0;
LCD_RW = 0;
LCD_EN = 0;
_nop_();
_nop_();
LCD_data = cmd;
DelayNOP();
LCD_EN = 1;
DelayNOP();
LCD_EN = 0;
}
void Lcd_WriteDat(uchar dat)
{
LCD_RS = 1;
LCD_RW = 0;
LCD_EN = 0;
LCD_data = dat;
DelayNOP();
LCD_EN = 1;
DelayNOP();
LCD_EN = 0;
}
void Lcd_Init(void)
{
LCD_PSB = 1; //并口方式
Lcd_WriteCmd(0x34); //扩充指令操作
delay(5);
Lcd_WriteCmd(0x30); //基本指令操作
delay(5);
Lcd_WriteCmd(0x0C); //显示开,关光标
delay(5);
Lcd_WriteCmd(0x01); //清除LCD的显示内容
delay(5);
}
void Lcd_SetPos(uchar X,uchar Y)
{
uchar pos;
if (X==0)
{X=0x80;}
else if (X==1)
{X=0x90;}
else if (X==2)
{X=0x88;}
else if (X==3)
{X=0x98;}
pos = X+Y ;
Lcd_WriteCmd(pos); //显示地址
}
void Lcd_DispLine(uchar line, uchar pos, uchar *str)
{
int i = 0;
Lcd_SetPos(line, pos);
while (str[i] != '\0')
{
Lcd_WriteDat(str[i]);
i++;
}
}
12864每一行的地址为,第一行是0x80,第二行是0x90,第三行是0x88,第四行是0x98。12864每一行的地址为,第一行是0x80,第二行是0x90,第三行是0x88,第四行是0x98。
3.2.6、GPS子模块
这些函数用来读取GPS接收器传来的数据,并进行分析处理。
void GPS_Init(void)
{
Lcd_DispLine(0, 0, init1);
Lcd_DispLine(1, 0, init2);
Lcd_DispLine(2, 0, init3);
Lcd_DispLine(3, 0, init4);
}
int GPS_RMC_Parse(char *line,GPS_INFO *GPS)
{
uchar ch, status, tmp;
float lati_cent_tmp, lati_second_tmp;
float long_cent_tmp, long_second_tmp;
float speed_tmp;
char *buf = line;
ch = buf[5];
status = buf[GetComma(2, buf)];
if (ch == 'C') //如果第五个字符是C,($GPRMC)
{
if (status == 'A') //如果数据有效,则分析
{
GPS -> NS = buf[GetComma(4, buf)];
GPS -> EW = buf[GetComma(6, buf)];
GPS->latitude = Get_Double_Number(&buf[GetComma(3, buf)]);
GPS->longitude = Get_Double_Number(&buf[GetComma( 5, buf)]);
GPS->latitude_Degree = (int)GPS->latitude / 100; //分离纬度
lati_cent_tmp = (GPS->latitude - GPS->latitude_Degree * 100);
GPS->latitude_Cent = (int)lati_cent_tmp;
lati_second_tmp = (lati_cent_tmp - GPS->latitude_Cent) * 60;
GPS->latitude_Second = (int)lati_second_tmp;
GPS->longitude_Degree = (int)GPS->longitude / 100; //分离经度
long_cent_tmp = (GPS->longitude - GPS->longitude_Degree * 100);
GPS->longitude_Cent = (int)long_cent_tmp;
long_second_tmp = (long_cent_tmp - GPS->longitude_Cent) * 60;
GPS->longitude_Second = (int)long_second_tmp;
speed_tmp = Get_Float_Number(&buf[GetComma(7, buf)]); //速度(单位:海里/时)
GPS->speed = speed_tmp * 1.85; //1海里=1.85公里
GPS->direction = Get_Float_Number(&buf[GetComma(8, buf)]); //角度
GPS->D.hour = (buf[7] - '0') * 10 + (buf[8] - '0'); //时间
GPS->D.minute = (buf[9] - '0') * 10 + (buf[10] - '0');
GPS->D.second = (buf[11] - '0') * 10 + (buf[12] - '0');
tmp = GetComma(9, buf);
GPS->D.day = (buf[tmp + 0] - '0') * 10 + (buf[tmp + 1] - '0'); //日期
GPS->D.month = (buf[tmp + 2] - '0') * 10 + (buf[tmp + 3] - '0');
GPS->D.year = (buf[tmp + 4] - '0') * 10 + (buf[tmp + 5] - '0')+2000;
UTC2BTC(&GPS->D);
return 1;
}
}
return 0;
}
int GPS_GGA_Parse(char *line,GPS_INFO *GPS)
{
uchar ch, status;
char *buf = line;
ch = buf[4];
status = buf[GetComma(2, buf)];
if (ch == 'G') //$GPGGA
{
if (status != ',')
{
GPS->height_sea = Get_Float_Number(&buf[GetComma(9, buf)]);
GPS->height_ground = Get_Float_Number(&buf[GetComma(11, buf)]);
return 1;
}
}
return 0;
}
static float Str_To_Float(char *buf)
{
float rev = 0;
float dat;
int integer = 1;
char *str = buf;
int i;
while(*str != '\0')
{
switch(*str)
{
case '0':
dat = 0;
break;
case '1':
dat = 1;
break;
case '2':
dat = 2;
break;
case '3':
dat = 3;
break;
case '4':
dat = 4;
break;
case '5':
dat = 5;
break;
case '6':
dat = 6;
break;
case '7':
dat = 7;
break;
case '8':
dat = 8;
break;
case '9':
dat = 9;
break;
case '.':
dat = '.';
break;
}
if(dat == '.')
{
integer = 0;
i = 1;
str ++;
continue;
}
if( integer == 1 )
{
rev = rev * 10 + dat;
}
else
{
rev = rev + dat / (10 * i);
i = i * 10 ;
}
str ++;
}
return rev;
}
static float Get_Float_Number(char *s)
{
char buf[10];
uchar i;
float rev;
i=GetComma(1, s);
i = i - 1;
strncpy(buf, s, i);
buf[i] = 0;
rev=Str_To_Float(buf);
return rev;
}
static double Str_To_Double(char *buf)
{
double rev = 0;
double dat;
int integer = 1;
char *str = buf;
int i;
while(*str != '\0')
{
switch(*str)
{
case '0':
dat = 0;
break;
case '1':
dat = 1;
break;
case '2':
dat = 2;
break;
case '3':
dat = 3;
break;
case '4':
dat = 4;
break;
case '5':
dat = 5;
break;
case '6':
dat = 6;
break;
case '7':
dat = 7;
break;
case '8':
dat = 8;
break;
case '9':
dat = 9;
break;
case '.':
dat = '.';
break;
}
if(dat == '.')
{
integer = 0;
i = 1;
str ++;
continue;
}
if( integer == 1 )
{
rev = rev * 10 + dat;
}
else
{
rev = rev + dat / (10 * i);
i = i * 10 ;
}
str ++;
}
return rev;
}
static double Get_Double_Number(char *s)
{
char buf[10];
uchar i;
double rev;
i=GetComma(1, s);
i = i - 1;
strncpy(buf, s, i);
buf[i] = 0;
rev=Str_To_Double(buf);
return rev;
}
static uchar GetComma(uchar num,char *str)
{
uchar i,j = 0;
int len=strlen(str);
for(i = 0;i < len;i ++)
{
if(str[i] == ',')
j++;
if(j == num)
return i + 1;
}
return 0;
}
static void UTC2BTC(DATE_TIME *GPS)
{
GPS->second ++;
if(GPS->second > 59)
{
GPS->second = 0;
GPS->minute ++;
if(GPS->minute > 59)
{
GPS->minute = 0;
GPS->hour ++;
}
}
GPS->hour = GPS->hour + 8;
if(GPS->hour > 23)
{
GPS->hour -= 24;
GPS->day += 1;
if(GPS->month == 2 ||
GPS->month == 4 ||
GPS->month == 6 ||
GPS->month == 9 ||
GPS->month == 11 )
{
if(GPS->day > 30)
{
GPS->day = 1;
GPS->month++;
}
}
else
{
if(GPS->day > 31)
{
GPS->day = 1;
GPS->month ++;
}
}
if(GPS->year % 4 == 0 )
{
if(GPS->day > 29 && GPS->month == 2)
{
GPS->day = 1;
GPS->month ++;
}
}
else
{
if(GPS->day > 28 &&GPS->month == 2)
{
GPS->day = 1;
GPS->month ++;
}
}
if(GPS->month > 12)
{
GPS->month -= 12;
GPS->year ++;
}
}
}
void Int_To_Str(int x,char *Str)
{
int t;
char *Ptr,Buf[5];
int i = 0;
Ptr = Str;
if(x < 10) // 当整数小于10时,转化为"0x"的格式
{
*Ptr ++ = '0';
*Ptr ++ = x+0x30;
}
else
{
while(x > 0)
{
t = x % 10;
x = x / 10;
Buf[i++] = t+0x30; // 通过计算把数字转化成ASCII码形式
}
i -- ;
for(;i >= 0;i --) // 将得到的字符串倒序
{
*(Ptr++) = Buf[i];
}
}
*Ptr = '\0';4、 系统测试
在做完上述的步骤后,我们可以进行系统测试。
刚开始时都一直搜索不到卫星,后面到处查找资料,终于找到问题所在,原来在室内基本上是搜不到卫星的,后面在室外进行测试,系统可以工作了,能够准确的定位。
具体如图:
(这里你自己照几张12864显示图片就可以了)
5、 总结
通过这次的毕业设计,我在更加灵活、牢固地掌握了所学的相关专业知识的同时。也大量学习了单片机方面的相关知识。至此,GPS定位系统经过最初设计、实现及应用检验,已经具备基本的功能,可初步满足个人移动导航信息系统的需求。当然由于时间和能力的有限,这款产品也有其一定的不足,值得进一步的深入研究,例如:在打开GPS接收模块之后,系统的响应速度将有显著的下降,还有就是显示的是数字,还没有转化为地图。问题可能在硬件平台的处理速度和可调用的资源有限,也有可能在软件接收上的程序结构不合理。GPS接收信号有时会发生信号接收的不稳定,出现信号的偏移,超过标称的误差值。问题可能在开发平台的设计电路中对于数据信号线的排版上,没有使信号线等距,也没有设置合理的信号隔离和保护带,导致最终出现了不应有的误差。但从软件上着手,如何纠正这样的误差也是值得研究的一个方向。在本课题中只实现了从任意点至任意点的导航,导航功能可以从软件方面继续深入的研究,包括以后开发对地图格式的选择等。这些都是将来值得完善之处。
参考文献:
- 杨颂华 数字电子技术基础.西安电子科技大学出版社 2009.12
- 曹国华 单片机原理及接口技术 西安电子科技大学出版社 2007.12
- 肖洪兵 跟我学用单片机. 北京:北京航空航天大学出版社,2002.8
- 何立民 单片机高级教程. 第1版.北京:北京航空航天大学出版社,2001
- 赵晓安 MCS-51单片机原理及应用. 天津:天津大学出版社,2001.3
- 李广第 单片机基础. 第1版.北京:北京航空航天大学出版社,1999
谢辞
时光飞逝,来不及感叹,大学生活已近尾声,四年多的努力与付出,随着本次论文的完成,将要划下完美的句号。
本论文设计在***老师的悉心指导和严格要求下业已完成,从课题选择到具体的写作过程,论文初稿与定稿无不凝聚着***老师的心血和汗水,在我的毕业设计期间,***老师为我提供了种种专业知识上的指导和一些富于创造性的建议,**老师一丝不苟的作风,严谨求实的态度使我深受感动,没有这样的帮助和关怀和熏陶,我不会这么顺利的完成毕业设计。在此向***老师表示深深的感谢和崇高的敬意!
在临近毕业之际,我还要借此机会向在这四年中给予我诸多教诲和帮助的各位老师表示由衷的谢意,感谢他们四年来的辛勤栽培。不积跬步何以至千里,各位任课老师认真负责,在他们的悉心帮助和支持下,我能够很好的掌握和运用专业知识,并在设计中得以体现,顺利完成毕业论文。
同时,在论文写作过程中,我还参考了有关的书籍和论文,在这里一并向有关的作者表示谢意。
我还要感谢同组的各位同学以及我的各位室友,在毕业设计的这段时间里,你们给了我很多的启发,提出了很多宝贵的意见,对于你们帮助和支持,在此我表示深深地感谢!
回首本人的求学生涯,父母的支持是本人最大的动力。父母不仅在经济上承受了巨大的负担,在心里上更有思子之情的煎熬与望子成龙的期待。忆往昔,每次回到家时父母的欣喜之情,每次离家时父母的依依不舍之眼神,电话和信件中的殷殷期待和思念之语,皆使本人刻苦铭心,目前除了学习成绩尚可外无以为报,希望以后的学习、工作和生活能使父母宽慰。

















 2085
2085

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









