






无差拍预测控制加延迟补偿
ID:3230643998752492
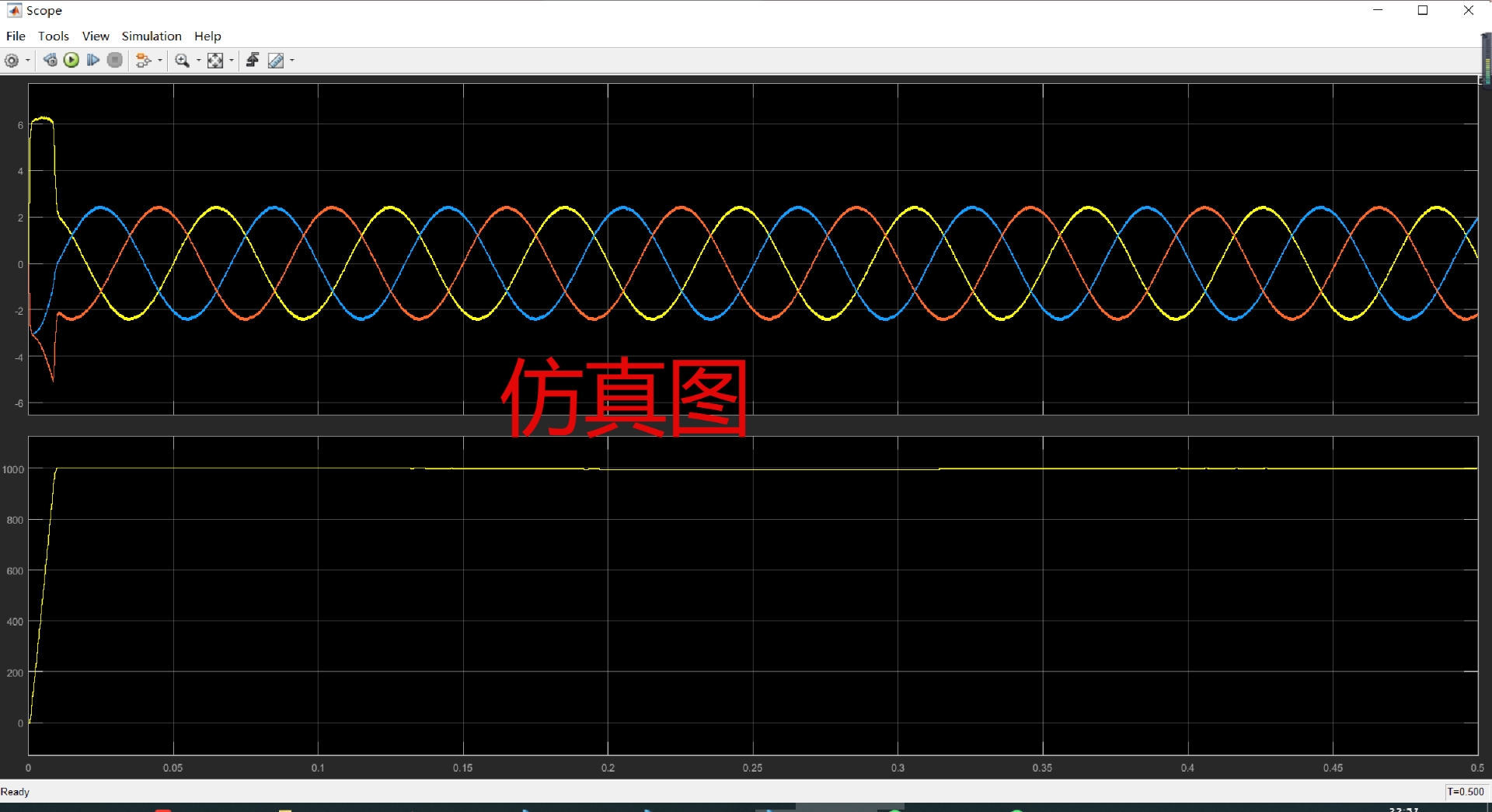
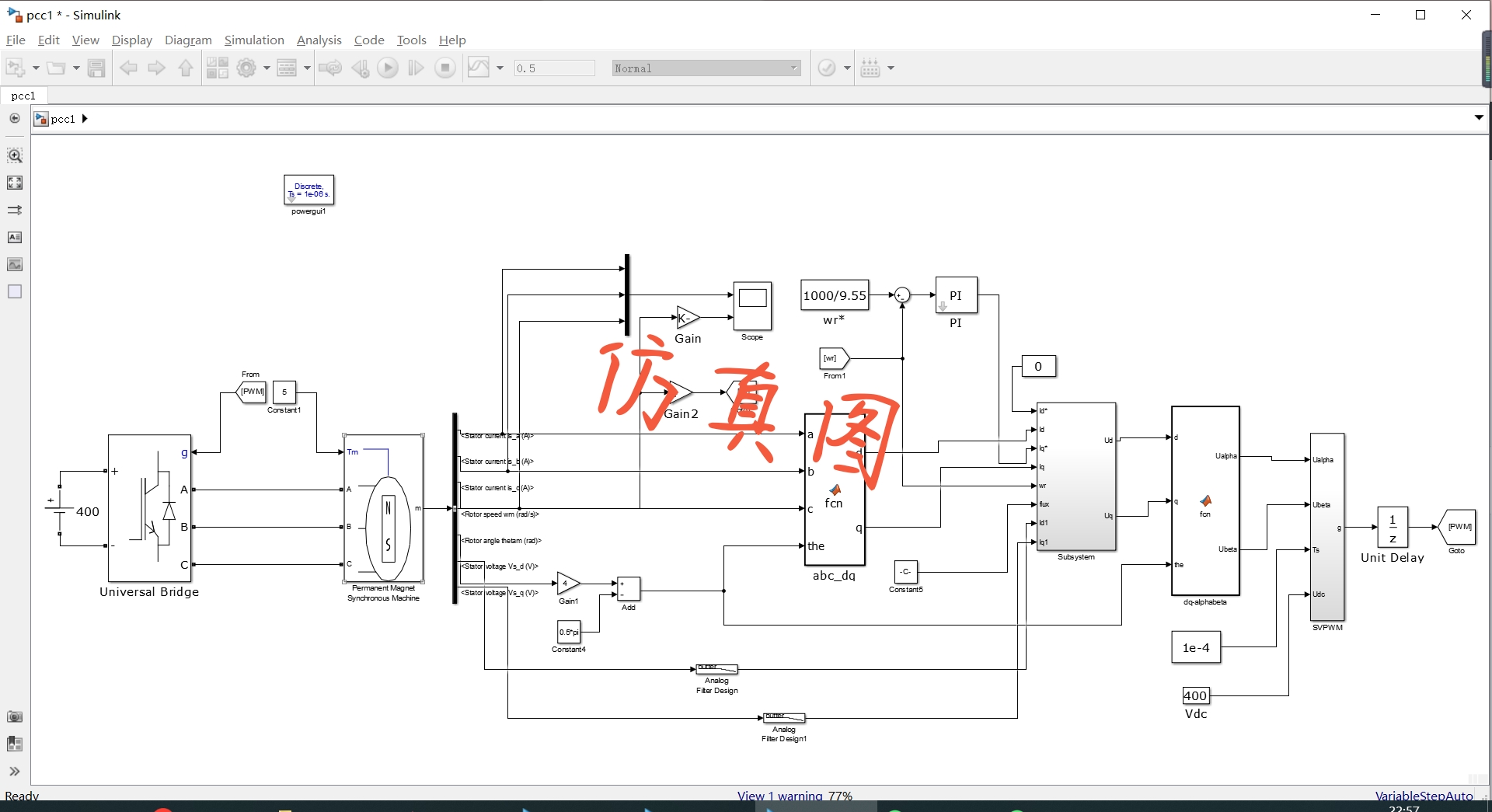
永磁同步电机控制
无差拍预测控制加延迟补偿是一种在程序员工作中经常遇到的技术问题,它在实际的应用中起着重要的作用。本文旨在探索无差拍预测控制加延迟补偿的原理与实践,并提供一些实用的解决方案。
首先,我们来介绍一下什么是无差拍预测控制。在分布式系统中,由于网络延迟等原因,不同节点之间的操作可能会出现时间差,进而导致数据的不一致性。无差拍预测控制的目标就是在分布式环境下实现多个节点之间的操作无差拍,即保证数据的一致性。为了实现这一目标,我们可以采用预测控制的方法。
预测控制是一种通过预测未来状态并采取相应措施来控制系统的方法。在无差拍预测控制中,我们可以利用节点之间的通信来进行时间同步,并根据已有的数据进行预测。通过预测未来的操作时间,我们可以在之后的操作中加入适当的延迟补偿,以保证操作的一致性。这种方法在分布式系统中非常实用,可以有效地解决数据不一致性的问题。
那么,在实际的应用中,我们如何进行无差拍预测控制加延迟补偿呢?首先,我们需要对系统进行建模,准确地描述系统的状态与行为。通过建模,我们可以分析系统存在的问题,并找到解决问题的方法。在分布式系统中,我们可以采用图论等方法对系统进行建模,以便更好地理解系统的行为。
接下来,我们需要进行时间同步。时间同步是无差拍预测控制的基础,它可以保证系统中各个节点的时间一致。在分布式系统中,我们可以采用一些算法来实现时间同步,例如NTP(网络时间协议)。通过时间同步,我们可以对系统中各个节点的操作时间进行统一,并为后续的预测与控制提供基础。
然后,我们需要进行预测与控制。利用已有的数据,我们可以通过一些算法来预测系统的未来状态。在预测的基础上,我们可以制定相应的控制策略,并在操作中加入适当的延迟补偿。通过预测与控制,我们可以使系统中各个节点的操作无差拍,进而保证数据的一致性。
最后,我们需要进行实际的应用与验证。在实际的分布式系统中,我们可以将无差拍预测控制加延迟补偿方法进行实际应用,并通过实验验证其效果。通过实际的验证,我们可以得出结论并对方法进行总结与改进。
综上所述,无差拍预测控制加延迟补偿是一种解决分布式系统中数据一致性问题的有效方法。通过建模、时间同步、预测与控制以及实际应用与验证,我们可以实现无差拍预测控制加延迟补偿的目标,并提升系统的性能与稳定性。在实际的程序开发中,我们可以根据具体情况选择合适的方法,并根据需求进行优化与改进。相信通过不断的探索与实践,我们可以在分布式系统中取得更好的效果,提供更好的用户体验。
相关的代码,程序地址如下:http://imgcs.cn/643998752492.html
















 806
806











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









