






ACC自适应巡航的carsim与simulink联合仿真模型
ID:51300643950127312
北冰洋双子座甘草
ACC(自适应巡航控制系统)作为新一代汽车智能驾驶辅助技术的重要组成部分,已经在现代汽车上得到广泛应用。为了确保其可靠性和性能,车辆制造商通常采用车辆动力学仿真模型来评估ACC系统的控制策略和效果。其中,Carsim和Simulink作为两种常用的仿真软件,可以联合使用来构建ACC系统的仿真模型,以提供精确的仿真结果和可靠的评估。
在ACC系统的设计与开发过程中,Carsim和Simulink的联合仿真模型成为一个重要的工具。Carsim是一种基于多体动力学理论的车辆仿真软件,它能够精确地模拟车辆的动力学行为,包括车辆悬挂、转向、刹车等方面的特性。而Simulink则是一种广泛应用于控制系统设计的仿真工具,它提供了丰富的模块和函数库,能够方便地进行控制策略的建模和仿真。
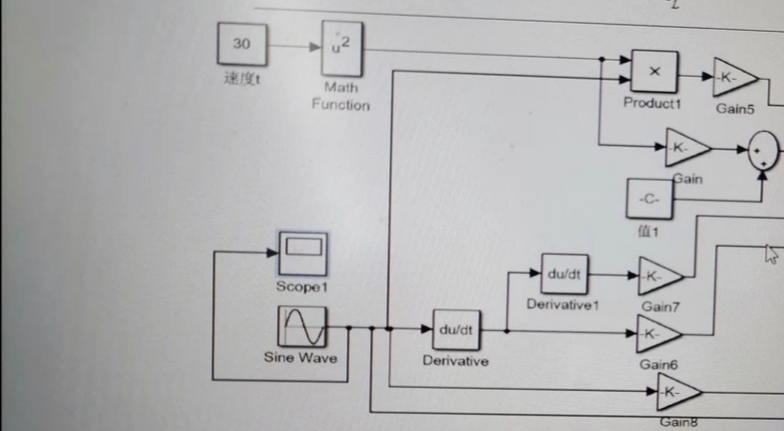
将Carsim和Simulink联合起来,可以充分发挥两者的优势,提高仿真模型的准确性和可靠性。具体来说,通过将Carsim中的车辆动力学模型与Simulink中的控制策略模型进行耦合,可以实现整个ACC系统的仿真。在仿真过程中,Carsim模型可以提供车辆的动力学行为,例如加速度、转向角度等等,而Simulink模型则负责控制策略的实现和评估。
ACC系统的主要功能是根据前方车辆的速度和距离来自动调整车辆的速度,以保持与前方车辆的安全距离。而在联合仿真模型中,我们可以通过调整控制策略模型中的参数来评估ACC系统在不同场景下的性能表现。例如,我们可以改变车辆与前方车辆的距离、前方车辆的速度等因素,来观察ACC系统的响应情况。通过这种方式,可以对ACC系统的控制策略进行优化和改进,以提高系统的性能和安全性。
除了评估ACC系统的控制策略外,联合仿真模型还可以用于评估ACC系统在不同实际道路条件下的性能表现。例如,我们可以在仿真模型中添加道路的坡度、曲率等因素,来模拟不同的道路环境。通过这种方式,我们可以对ACC系统在不同道路环境下的稳定性和适应性进行评估,以指导其实际应用。
总的来说,ACC自适应巡航的Carsim与Simulink联合仿真模型为ACC系统的设计与开发提供了一个强大而有效的工具。通过该联合仿真模型,我们可以准确评估ACC系统的控制策略和性能,并进行相应的优化和改进。这将有助于提高ACC系统的安全性、稳定性和适应性,为汽车智能驾驶技术的发展做出贡献。希望通过我们的努力,ACC系统能够在未来的汽车市场上发挥更大的作用,为驾驶员提供更安全、更舒适的驾驶体验。
相关的代码,程序地址如下:http://imgcs.cn/643950127312.html
















 343
343

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









