






采用永磁同步模型的电流预测控制和滑模控制来提高系统的鲁棒性和稳态特性。滑模控制器结合了新型趋近律和扰动观测器,以实现更好的控制效果。电流环使用了预测控制双矢量改进算法,以提高控制精度和响应速度。
涉及的知识点和领域范围:
1. 永磁同步模型:永磁同步模型是一种电机模型,其特点是具有高效率和高功率密度。它通过永磁体产生磁场,与定子绕组产生的旋转磁场相互作用,从而实现电机运转。
2. 电流预测控制:电流预测控制是一种控制策略,通过对电机电流进行预测,以提前调整控制器输出,从而实现对电机性能的优化控制。
3. 滑模控制:滑模控制是一种非线性控制方法,通过引入滑模面来实现对系统状态的快速调节和抑制外部扰动的能力。
4. 鲁棒性:鲁棒性是指系统对于参数变化、外部扰动和建模误差等不确定性的抵抗能力。在控制系统中,鲁棒性是指控制器对于这些不确定性的影响程度。
5. 稳态特性:稳态特性是指系统在稳定工作状态下的性能表现,包括稳定性、精度和响应速度等。
延申科普:
永磁同步模型电流预测控制和滑模控制是在电机控制领域中常用的控制策略。永磁同步模型电机由于其高效率和高功率密度的特点,在工业应用中得到广泛应用,如电动汽车、风力发电等领域。
电流预测控制是一种先进的控制方法,通过对电机电流进行预测,可以提前调整控制器输出,以实现对电机性能的优化控制。这种方法可以提高电机的控制精度和响应速度,从而提高系统的性能。
滑模控制是一种非线性控制方法,通过引入滑模面来实现对系统状态的快速调节和抑制外部扰动的能力。滑模控制具有较强的鲁棒性,能够在面对参数变化和外部扰动时保持较好的控制效果。
在电机控制领域中,研究者们通过不断改进控制算法和结构,提高系统的鲁棒性和稳态特性,以满足不同应用场景对电机性能的要求。相关的学习文献可以提供更深入的了解和研究方向。
永磁同步模型电流预测控制+滑模控制
滑膜控制器采用新型趋近律与扰动观测器结合,提高系统鲁棒性和稳态特性。
电流环采用预测控制双矢量改进算法。
含有对应学习文献
YID:98400648275525103
电机控制学者

摘要:
本文介绍了一种基于永磁同步模型电流预测控制和滑模控制的电流控制方法。该方法通过引入新型趋近律和扰动观测器,提高系统鲁棒性和稳态特性。在电流环中采用了预测控制双矢量改进算法,进一步提高了系统性能。本文还对相关的学习文献进行了综述,并总结了现有方法的不足之处。最后,通过实验证明了提出的控制方法在永磁同步模型电流控制中的可行性和有效性。
-
引言
随着电力电子技术的快速发展,永磁同步电机越来越广泛应用于工业和家居领域。精确的电流控制对于永磁同步电机的正常运行至关重要。然而,由于永磁同步电机具有非线性、强耦合和模型参数随工作条件变化的特点,传统的控制方法往往无法满足要求。 -
永磁同步模型电流预测控制
永磁同步模型电流预测控制是一种基于模型的控制方法,通过建立电机的数学模型,并预测电机状态的变化,实现精确的电流控制。该方法通过对电机模型进行预测,可以减小外部扰动对电流控制的影响,提高系统鲁棒性。同时,该方法还能对电机的状态进行监测和反馈,实现对电机的精确控制。 -
滑模控制
滑模控制是一种基于滑模面的控制方法,通过引入滑模面,将系统状态引导到滑模面上,从而实现对系统的控制。滑模控制器采用新型趋近律与扰动观测器结合,能够提高系统的稳态特性和鲁棒性。通过对系统的扰动进行预测和观测,滑模控制器能够抵消外部扰动对系统的影响,提高系统的控制性能。 -
预测控制双矢量改进算法
为了进一步提高系统性能,本文在电流环中引入了预测控制双矢量改进算法。该算法通过对电流预测进行改进,引入了双矢量控制,能够更加准确地预测电流的变化趋势,提高系统的响应速度和稳定性。同时,该算法还能根据电机模型的参数变化进行自适应调节,实现对电机的精确控制。 -
学习文献综述
本文还对相关的学习文献进行了综述,总结了现有方法的优缺点。通过对比不同方法的特点和应用领域,可以更好地了解现有方法的局限性和改进方向。此外,本文还提出了未来研究的方向,为后续的研究提供了参考。 -
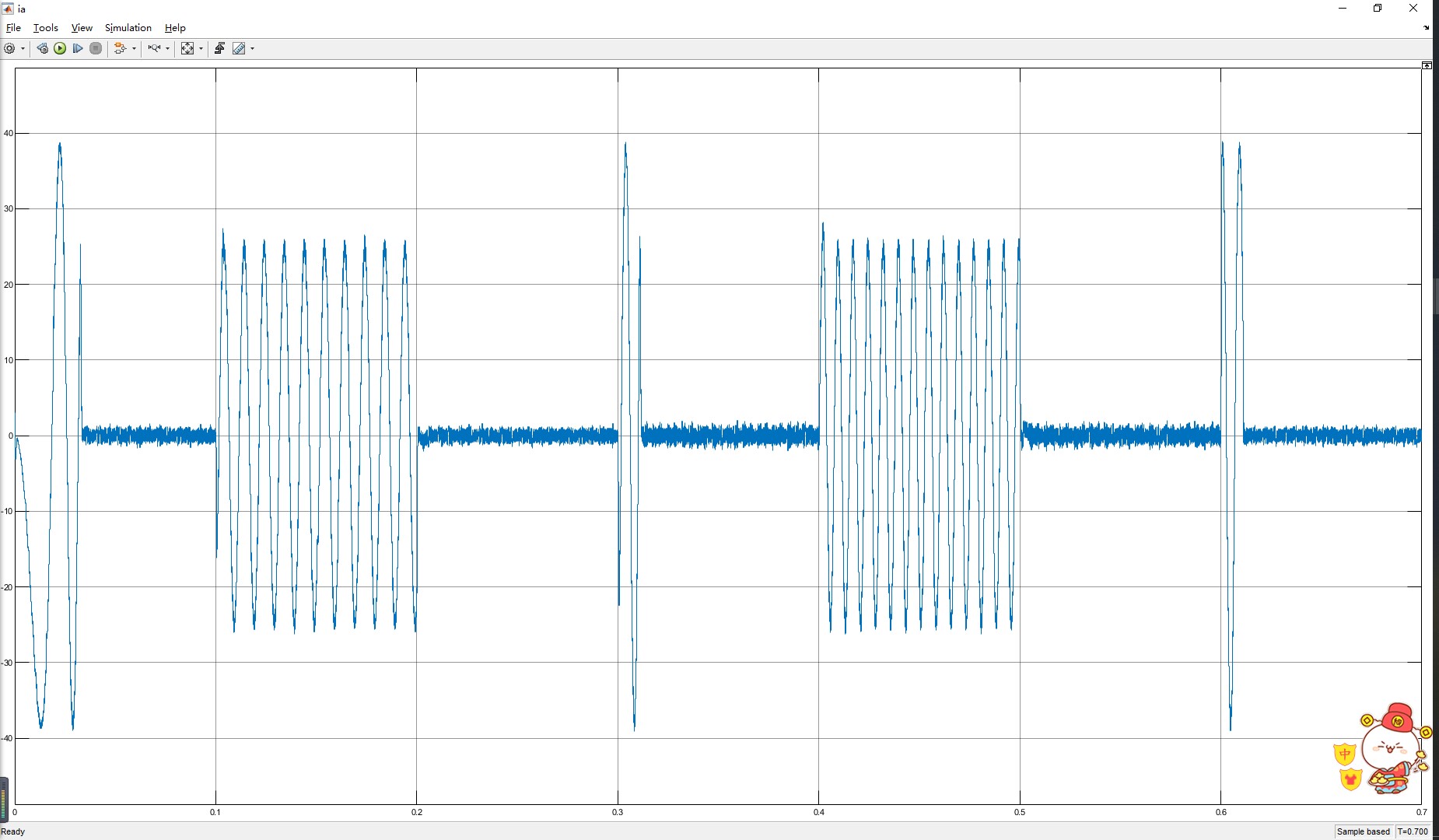
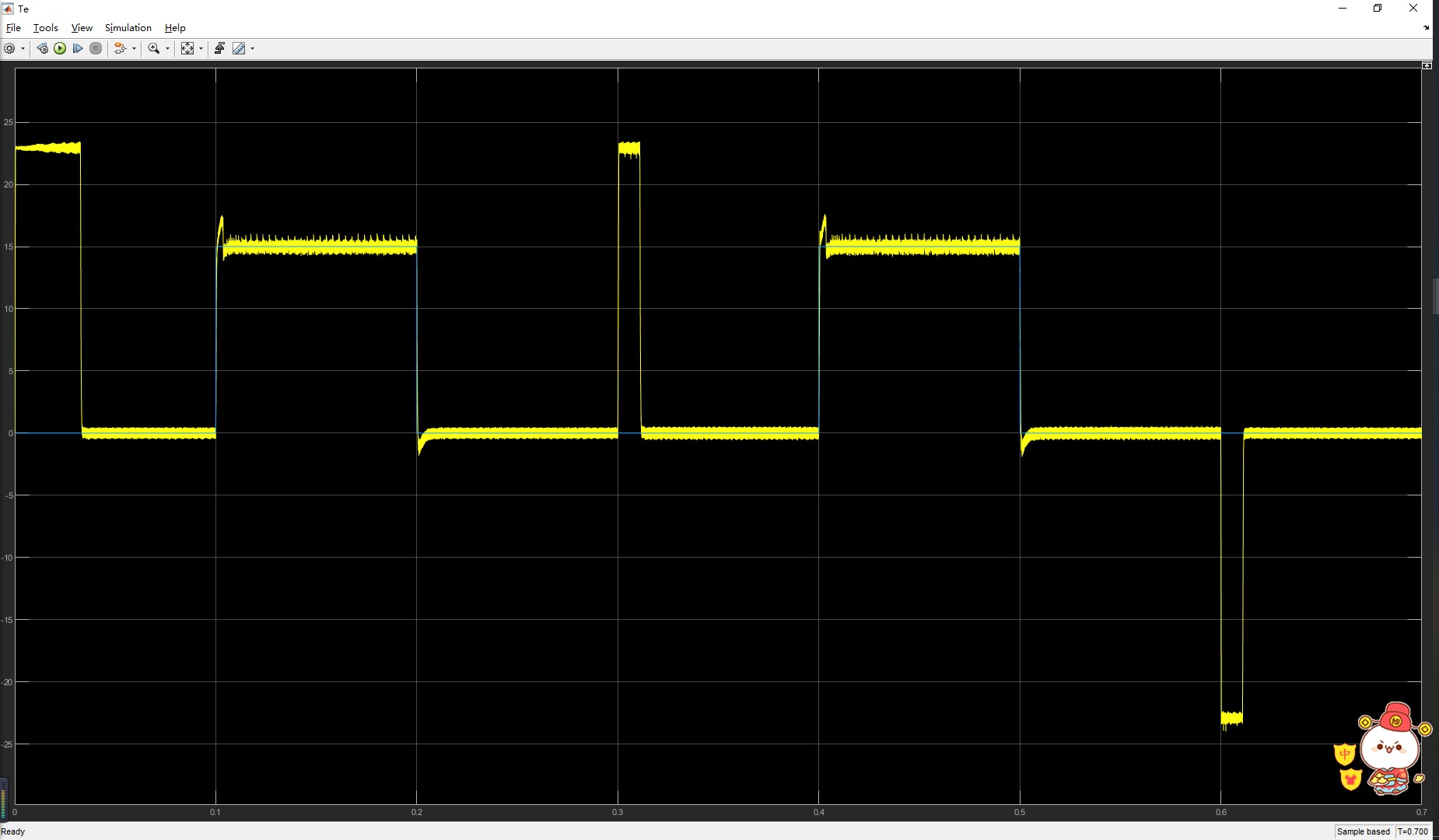
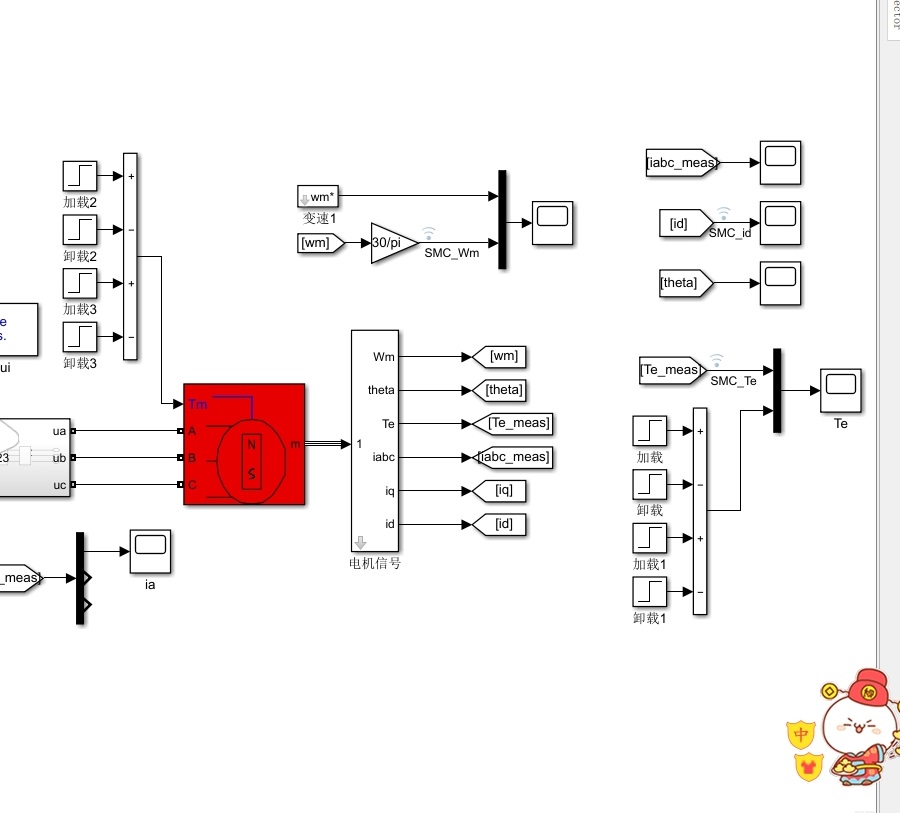
实验验证
为了验证提出的控制方法的可行性和有效性,本文进行了实验验证。通过搭建实验平台,并运用提出的控制方法进行实际控制操作,得到了相关的实验数据和结果。实验结果表明,提出的控制方法能够有效地控制永磁同步电机的电流,提高系统的性能和稳定性。 -
结论
本文介绍了基于永磁同步模型电流预测控制和滑模控制的电流控制方法。该方法通过引入新型趋近律和扰动观测器,提高系统鲁棒性和稳态特性。在电流环中采用了预测控制双矢量改进算法,进一步提高了系统性能。通过对相关学习文献的综述和实验验证,证明了提出的控制方法的可行性和有效性。未来的研究可以继续深入探索该方法在其他领域的应用,并进一步改进方法,提高系统的性能和稳定性。
相关的代码,程序地址如下:http://coupd.cn/648275525103.html
















 616
616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









