







文章目录
一、 二叉搜索树
1.1 概念
二叉搜索树( Binary Search Tree,BST )是一种特殊的二叉树,它可以是空树,也可以是满足以下性质的一颗二叉树:
- 若左子树不为空,左子树中所有节点的键值都小于根节点的值。
- 若右子树不为空,右子树中所有节点的键值都大于根节点的值。
- 左右子树也分别为二叉搜索树。
因此,二叉搜索树的中序遍历结果是一个有序序列。这个特性使得二叉搜索树在搜索、插入和删除操作时具有高效性能。
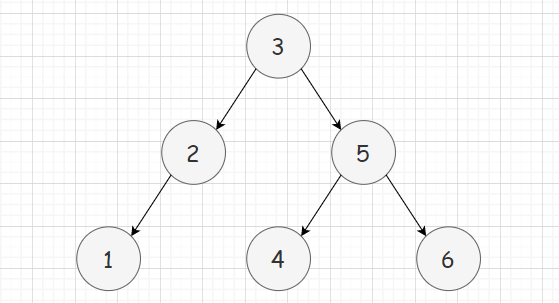
📝二叉搜索树的结构示意图
1.2 操作
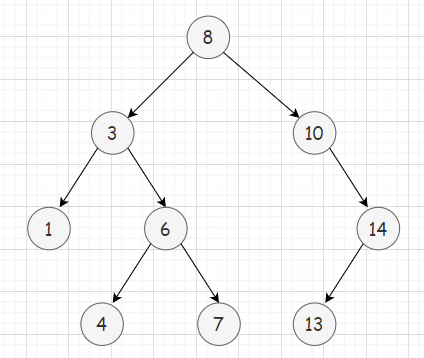
⭕ 对如下二叉搜索树进行操作
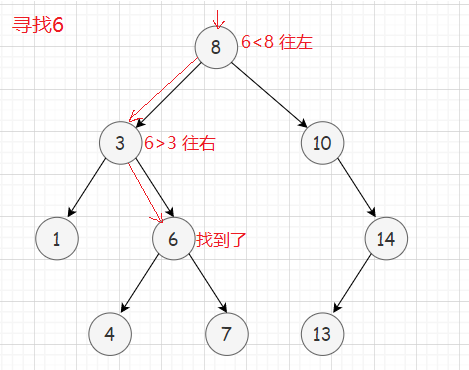
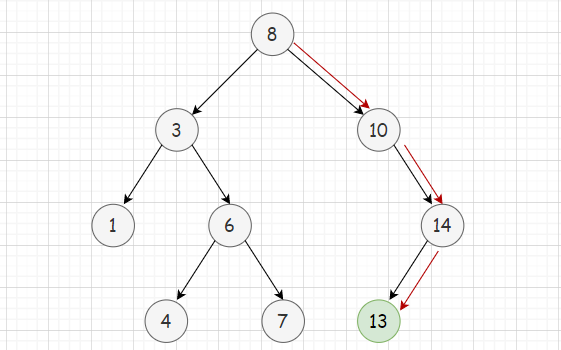
- 查询
🔎假设要查询key值是否存在于二叉树中
- 从根节点开始,key比当前节点的键值大,则往右继续找;key比当前节点的键值小,则往左继续找。
- 若当前节点为空时还没找到,则key值不存在。
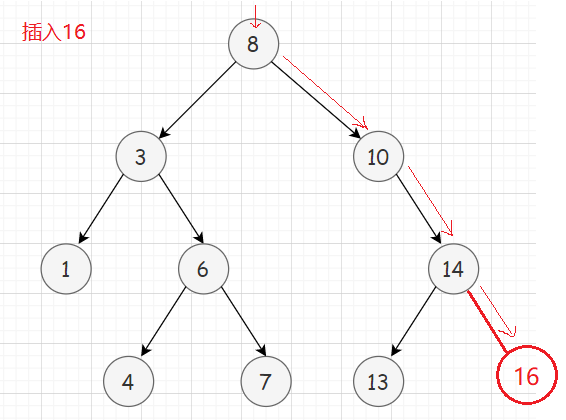
- 插入
1️⃣若树为空,则直接新增节点,作为该树的根节点
2️⃣若树不为空,则按二叉搜索树查询规则找到插入位置,再建立与父节点的链接关系。
- 删除
二叉搜索树的删除某个节点后,要想继续保持二叉搜索树的特性,需要进行一些调整。这里分三种情况。
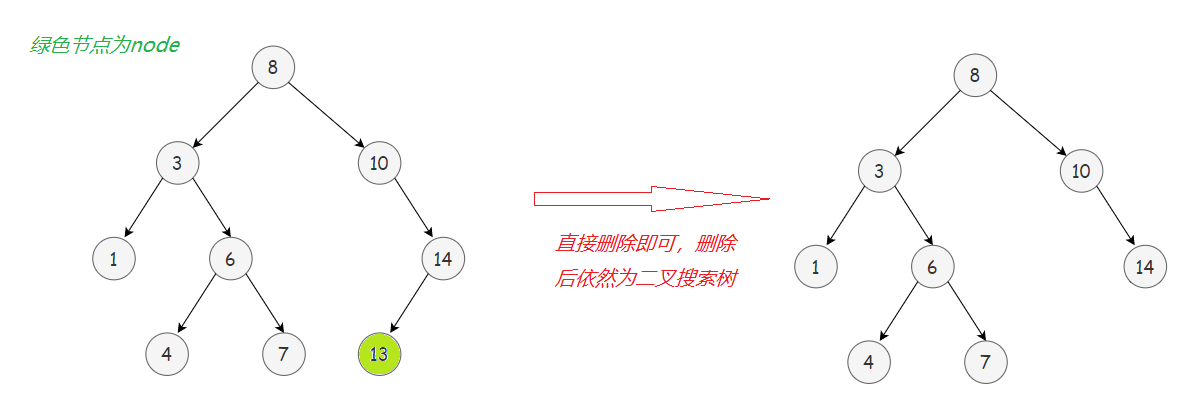
假设将要删除node节点
1️⃣ 若node没有子树,即node为叶子节点,那么直接删除即可。
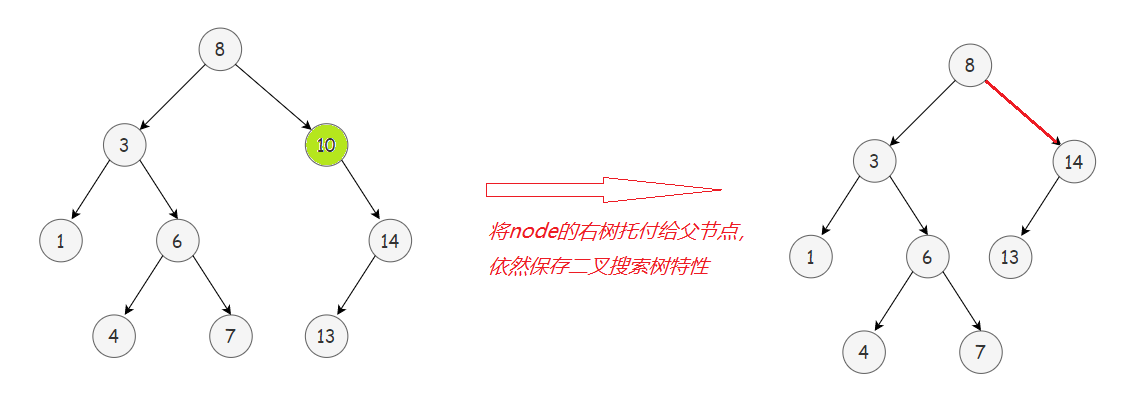
2️⃣ 若node左右子树有一边为空一边非空,则需“托孤”,即把非空一边的子树托付给node父节点。
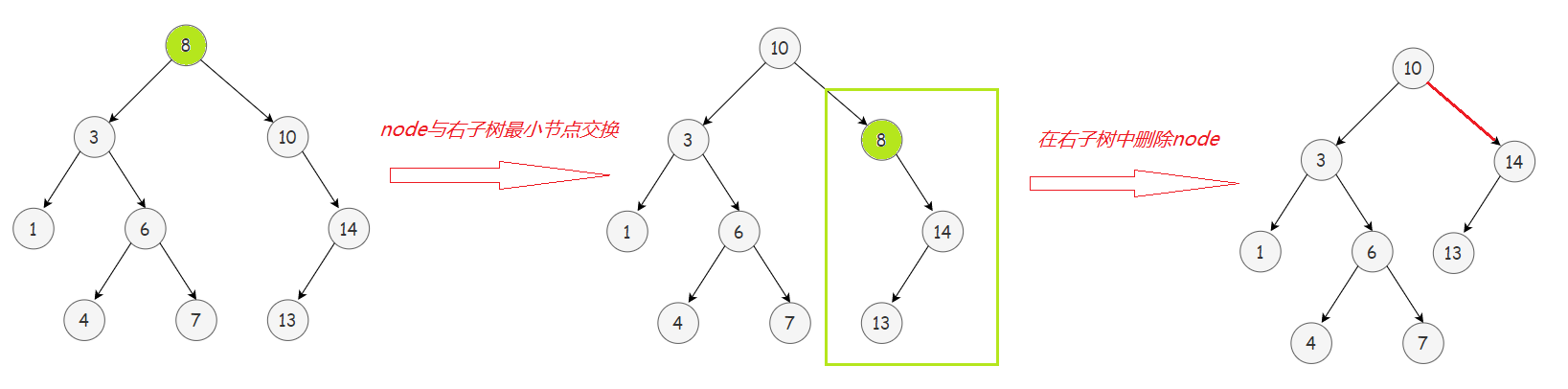
3️⃣ 若node左右子树都存在,则需在左子树中找到最大节点(或在右子树中找到最小节点)来替代node,然后在左子树(或右子树)中删除node。
观察二叉搜索树的中序遍历序列,可见进行上述操作后,中序遍历序列依然有序,二叉搜索树保持其特性。

💡替换node后,在左子树(或右子树)中删除node,这样做还有一个好处:
因为node是与左子树中最大节点(或右子树中最小节点)替换后,所以替换后的node一定没有右子树(或左子树),因此在这种情况下删除node,必然是删除节点的1️⃣或2️⃣情况,避免了重复3️⃣情况删除而进入死循环。
1.3 代码实现
#include <iostream>
#include <algorithm>
using namespace std;
// 二叉搜索树的节点
template <class K>
struct BSTreeNode
{
typedef BSTreeNode<K> Self;
Self* _pleft;
Self* _pright;
K _key;
BSTreeNode(const K& key)
:_key(key)
,_pleft(nullptr)
,_pright(nullptr)
{}
};
// 二叉搜索树
template <class K>
class BSTree
{
typedef BSTreeNode<K> Node;
typedef BSTreeNode<K>* pNode;
public:
// constructor
BSTree()
:_root(nullptr)
{}
// destructor
~BSTree()
{
_destroy(_root);
}
// 中序遍历
void Inorder()
{
_inorder(_root);
cout << endl;
}
// 插入
bool Insert(const K& key)
{
// 空树
if(_root == nullptr)
{
_root = new Node(key);
return true;
}
// 不为空树,要先找到插入位置
else
{
pNode cur = _root;
pNode parent = nullptr;
while (cur)
{
if (key > cur->_key)
{
parent = cur;
cur = cur->_pright;
}
else if (key < cur->_key)
{
parent = cur;
cur = cur->_pleft;
}
else
{
return false;
}
}
cur = new Node(key);
if (cur->_key > parent->_key)
parent->_pright = cur;
else
parent->_pleft = cur;
return true;
}
}
// 删除
void Erase(const K& key)
{
_erase(_root, key);
}
private:
pNode _root;
void _inorder(pNode root)
{
if (root == nullptr)
return;
_inorder(root->_pleft);
cout << root->_key << " ";
_inorder(root->_pright);
}
void _destroy(pNode root)
{
if (root == nullptr)
return;
_destroy(root->_pleft);
_destroy(root->_pright);
delete root;
}
bool _erase(pNode& root, const K& key)
{
// 先找到key值的节点
pNode cur = root;
pNode parent = nullptr;
while (cur)
{
if (key > cur->_key)
{
parent = cur;
cur = cur->_pright;
}
else if (key < cur->_key)
{
parent = cur;
cur = cur->_pleft;
}
else // 相等,找到了
break;
}
if (cur == nullptr) // 查无key值节点
return false;
// 1. cur左右至少有一个空(1️⃣、2️⃣情况)
if (cur->_pleft == nullptr || cur->_pright == nullptr)
{
pNode child = cur->_pleft;
if (child == nullptr)
child = cur->_pright;
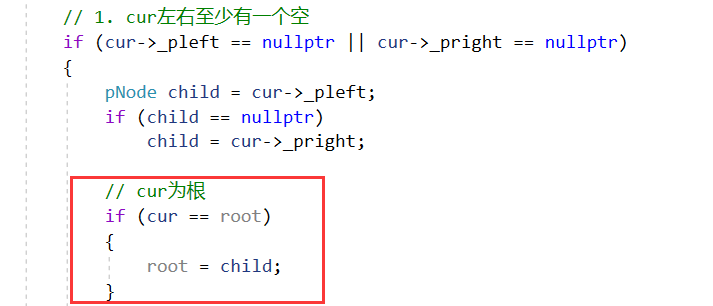
// cur为根
if (cur == root)
{
root = child;
}
// cur不为根
else
{
if (cur == parent->_pleft)
{
parent->_pleft = child;
}
else
{
parent->_pright = child;
}
}
delete cur;
cur = nullptr;
}
// 2. cur左右都非空(3️⃣情况)
else
{
//(1)找到右边最小(也可以是左边最大,通常小的离根较近,我们选用右边最小)的节点代替cur
pNode minRight = cur->_pright;
while (minRight->_pleft)
{
minRight = minRight->_pleft;
}
swap(cur->_key, minRight->_key);
//(2)转换为在cur的右子树删除minRight节点
_erase(cur->_pright, minRight->_key); // 此时一定是1️⃣或2️⃣情况
}
return true;
}
};
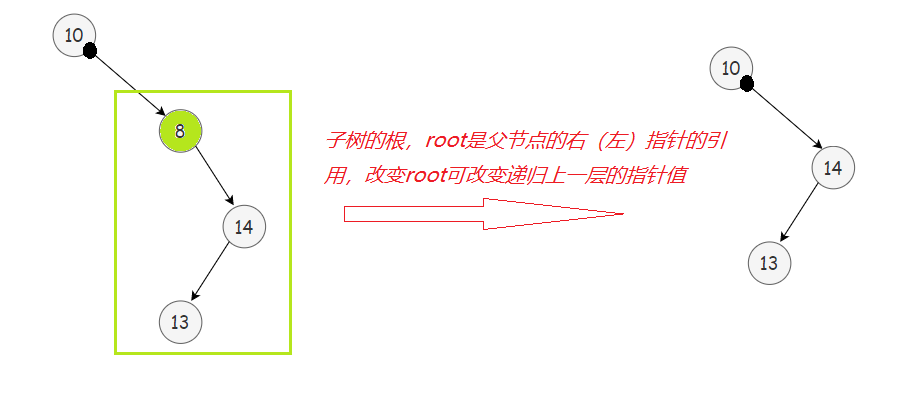
💡 _erase函数root参数设为引用的妙处在cur为根时,体现为以下两种情况相同处理
1. _erase(_root, key);
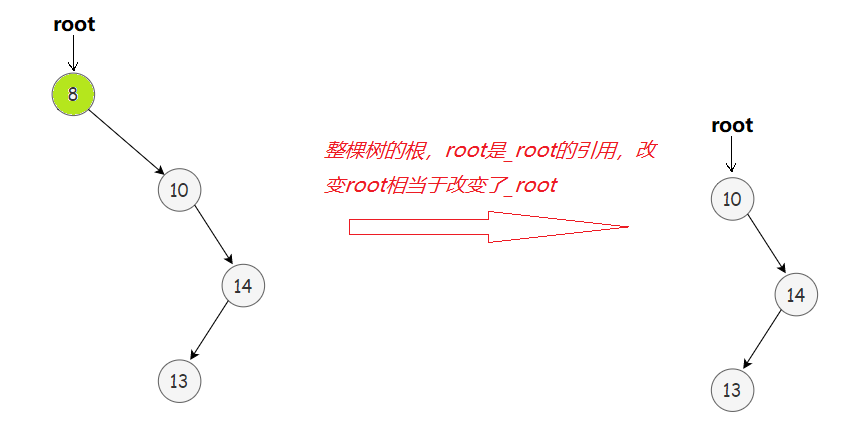
2. _erase(cur->_pright(或cur->_pleft), minRight->_key);
二、二叉搜索树的应用
K模型和KV模型
- K模型:K模型即只有key作为关键码,结构中只需要存储Key即可,关键码即为需要搜索到
的值。
比如:给一个单词word,判断该单词是否拼写正确,具体方式如下: 以词库中所有单词集合中的每个单词作为key,构建一棵二叉搜索树,在二叉搜索树中检索该单词是否存在,存在则拼写正确,不存在则拼写错误。
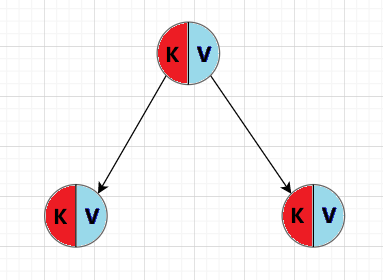
- KV模型:每一个关键码key,都有与之对应的值Value,即<Key, Value>的键值对。该种方
式在现实生活中非常常见
比如英汉词典就是英文与中文的对应关系,通过英文可以快速找到与其对应的中文,英 文单词与其对应的中文
<word, chinese>就构成一种键值对;
再比如统计单词次数,统计成功后,给定单词就可快速找到其出现的次数,单词与其出现次数就是<word, count>就构成一种键值对。
💬KV模型的代码实现:
// KV型
template <class K, class V>
struct BSTreeNode
{
typedef BSTreeNode<K, V> Self;
Self* _pleft;
Self* _pright;
K _key;
V _val;
BSTreeNode(const K& key, const V& val)
: _key(key)
, _val(val)
, _pleft(nullptr)
, _pright(nullptr)
{}
};
template <class K, class V>
class BSTree
{
typedef BSTreeNode<K, V> Node;
typedef BSTreeNode<K, V>* pNode;
public:
//constructor
BSTree()
:_root(nullptr)
{}
//destructor
~BSTree()
{
_destroy(_root);
}
void Inorder()
{
_inorder(_root);
cout << endl;
}
bool Insert(const K& key,const V& val)
{
// 空树
if (_root == nullptr)
{
_root = new Node(key, val);
return true;
}
// 不为空树,要先找到插入位置
else
{
pNode cur = _root;
pNode parent = nullptr;
while (cur)
{
if (key > cur->_key)
{
parent = cur;
cur = cur->_pright;
}
else if (key < cur->_key)
{
parent = cur;
cur = cur->_pleft;
}
else
{
return false;
}
}
cur = new Node(key, val);
if (cur->_key > parent->_key)
parent->_pright = cur;
else
parent->_pleft = cur;
return true;
}
}
void Erase(const K& key)
{
_erase(_root, key);
}
pNode Find(const K& key)
{
pNode cur = _root;
while (cur)
{
if (key > cur->_key)
{
cur = cur->_pright;
}
else if (key < cur->_key)
{
cur = cur->_pleft;
}
else
{
return cur;
}
}
return nullptr;
}
private:
pNode _root;
void _inorder(pNode root)
{
if (root == nullptr)
return;
_inorder(root->_pleft);
cout << root->_key << ":" << root->_val << endl;
_inorder(root->_pright);
}
void _destroy(pNode root)
{
if (root == nullptr)
return;
_destroy(root->_pleft);
_destroy(root->_pright);
delete root;
}
bool _erase(pNode& root, const K& key)
{
// 先找到key值的节点
pNode cur = root;
pNode parent = nullptr;
while (cur)
{
if (key > cur->_key)
{
parent = cur;
cur = cur->_pright;
}
else if (key < cur->_key)
{
parent = cur;
cur = cur->_pleft;
}
else // 相等,找到了
break;
}
if (cur == nullptr) // 查无key值节点
return false;
// 1. cur左右至少有一个空
if (cur->_pleft == nullptr || cur->_pright == nullptr)
{
pNode child = cur->_pleft;
if (child == nullptr)
child = cur->_pright;
// cur为根
if (cur == root)
{
root = child;
}
// cur不为根
else
{
// cur左右都为空
if (child == nullptr)
{
if (parent->_pleft->_key == cur->_key)
{
parent->_pleft = nullptr;
}
else
{
parent->_pright = nullptr;
}
}
// cur左右只有一个为空,不为空的为child
else
{
if (child->_key < parent->_key)
{
parent->_pleft = child;
}
else
{
parent->_pright = child;
}
}
if (cur == parent->_pleft)
{
parent->_pleft = child;
}
else
{
parent->_pright = child;
}
}
delete cur;
cur = nullptr;
}
//2. cur左右都非空
else
{
//找到右边最小的节点代替cur
pNode minRight = cur->_pright;
while (minRight->_pleft)
{
minRight = minRight->_pleft;
}
swap(cur->_key, minRight->_key);
//转换为在cur的右子树删除minRight节点
_erase(cur->_pright, minRight->_key);
}
return true;
}
};
三、二叉搜索树的性能分析
💭 二叉搜索树的插入、删除等操作,时间大部分都花费在查找节点上了。因此分析二叉搜索树的性能,主要看查找的性能。
假设二叉树有N个节点
如图是最优情况下的查找,该二叉搜索树接近完全二叉树,此时查找节点的时间复杂度是O(logN)
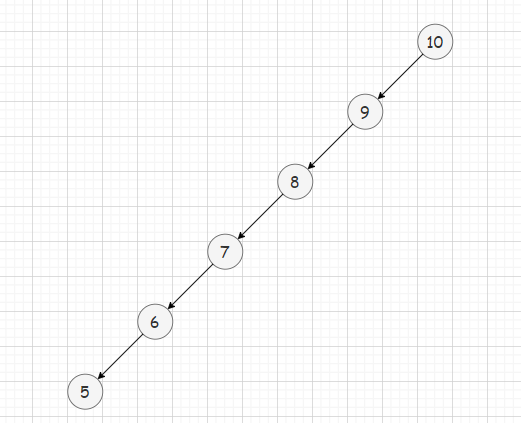
❗但也有上图所示的极端情况,有序插入节点后,二叉搜索树退化为单支,这种情况是最差情况,查找节点的时间复杂度为O(N)
💭 二叉搜索树退化为接近单支树时,其效率和性能就失去了。为了解决这个问题,使二叉搜索树始终保持最优情况,我们可以将二叉搜索树改造为AVL树和红黑树。下文分析AVL树。
四、AVL树
4.1 AVL树的概念
💭二叉搜索树虽可以缩短查找的效率,但如果数据有序或接近有序二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:
当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
能满足这种特性的树称为AVL树
⭕一颗AVL树可以是一棵空树,也可以是有以下性质的一棵二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度差(简称平衡因子)的绝对值不超过1
AVL树是一棵高度平衡的树。一棵n个节点的AVL树的高度为O(logn),查找的时间复杂度为O(logn)。
⭕定义
// AVL树的节点
template <class T>
struct AVLTreeNode
{
AVLTreeNode(const T& val)
:_val(val)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_bf(0)
{}
AVLTreeNode* _left; // 左指针
AVLTreeNode* _right; // 右指针
AVLTreeNode* _parent; // 双亲指针
T _val;
int _bf;// 平衡因子
};
// AVL树
template <class T>
class AVLTree
{
typedef AVLTreeNode<T> node;
typedef AVLTreeNode<T>* ptr;
public:
AVLTree()
:_root(nullptr)
{}
bool insert(const T& val);
private:
ptr _root;
};
4.2 AVL树的实现原理
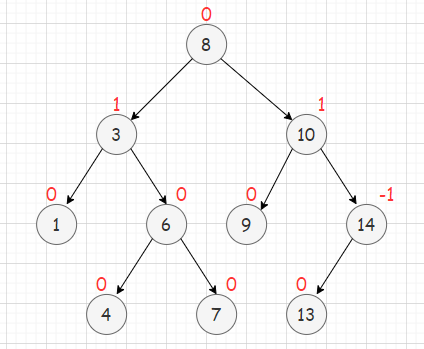
💭AVL树的原理主要体现在插入时要通过对节点的调节,以保证每个节点的左右子树高度差绝对值不超过1(即平衡因子不超过1)。插入后,分为以下三种情况。
默认平衡因子 = 右子树高度 - 左子树高度
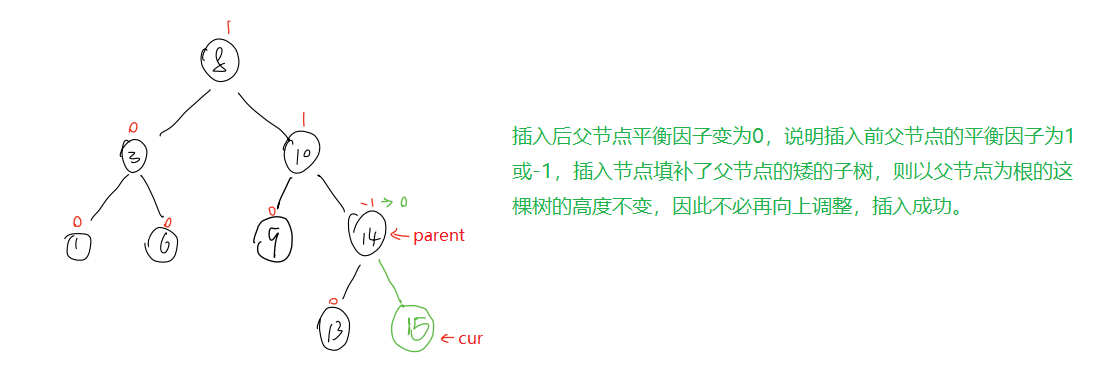
- 插入后,父节点的平衡因子变为0
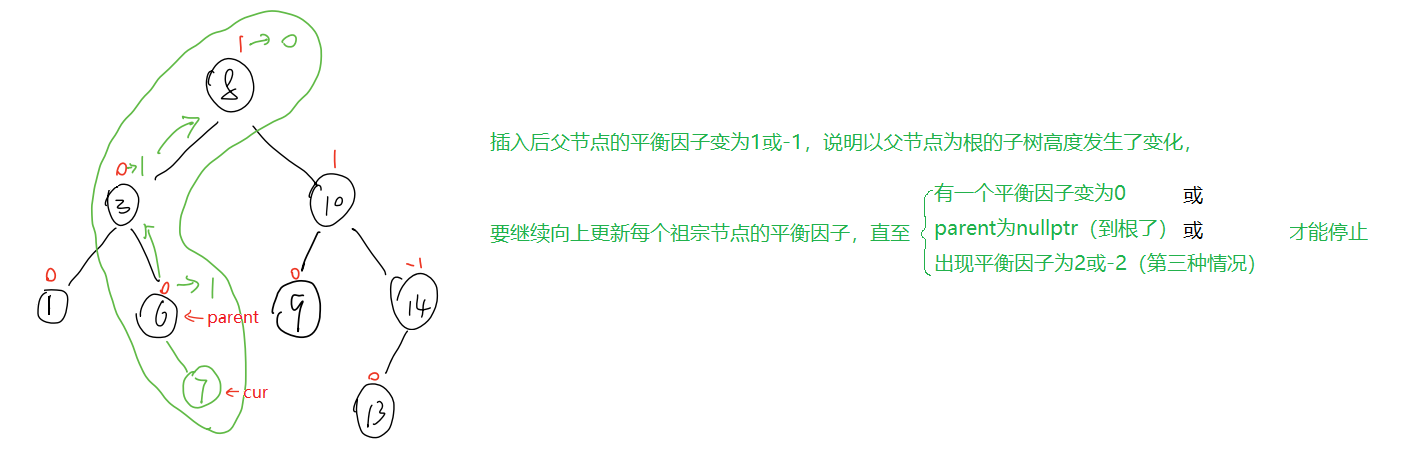
- 插入后,父节点的平衡因子变为1或-1
- 插入后,父节点的平衡因子变为2或-2
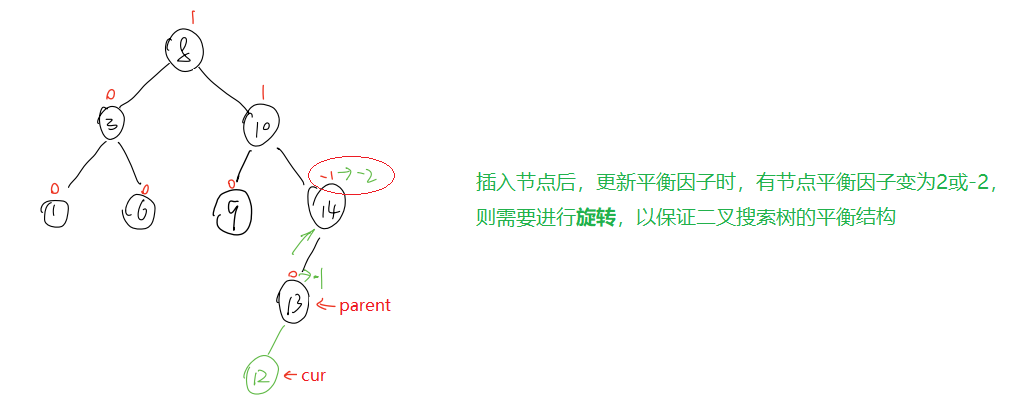
那么这里的旋转到底是怎么一回事?见后文详细分析。
📃 先搭建AVL树insert插入函数定义的大致框架
bool insert(const T& val)
{
// 先按二叉搜索树规则,找到插入位置
ptr cur = _root;
ptr parent = nullptr;
while (cur)
{
if (val < cur->_val)
{
parent = cur;
cur = cur->_left;
}
else if (val > cur->_val)
{
parent = cur;
cur = cur->_right;
}
else
{
// 相同元素不能插入
return false;
}
}
// 创建新节点并插入
cur = new node(val);
// 若根为空,直接把cur作根
if (_root == nullptr)
{
_root = cur;
return true;
}
else
{
if (cur->_val < parent->_val)
{
parent->_left = cur;
cur->_parent = parent;
}
else
{
parent->_right = cur;
cur->_parent = parent;
}
}
// 更新平衡因子
while (parent)
{
if (cur == parent->_left)
{
(parent->_bf)--;
}
else
{
(parent->_bf)++;
}
// 1.parent的_bf更新后为0
if (parent->_bf == 0)
{
// 插入成功
break;
}
// 2.parent的_bf更新后为1或-1,此时需要继续向上更新平衡因子
else if (parent->_bf == 1 || parent->_bf == -1)
{
//持续往上更新
cur = parent;
parent = parent->_parent;
}
// 3.parent的_bf更新后为2或-2,此时需要旋转,旋转后以parent为根的子树为平衡二叉树,不需要在继续向上更新平衡因子
else if (parent->_bf == 2 || parent->_bf == -2)
{
// 旋转...
break;
}
}
return true;
}
4.3 旋转
🔎如果在一棵原本是平衡的AVL树中插入一个新节点,可能造成不平衡,此时必须调整树的结构,使之平衡化。这种调整称之为旋转。根据节点插入位置的不同,AVL树的旋转分为四种:
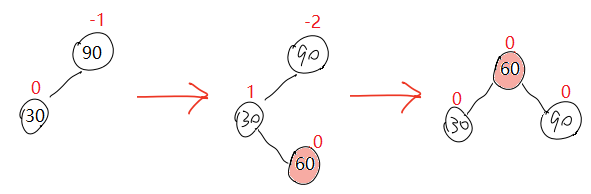
- 左左 —— 右单旋
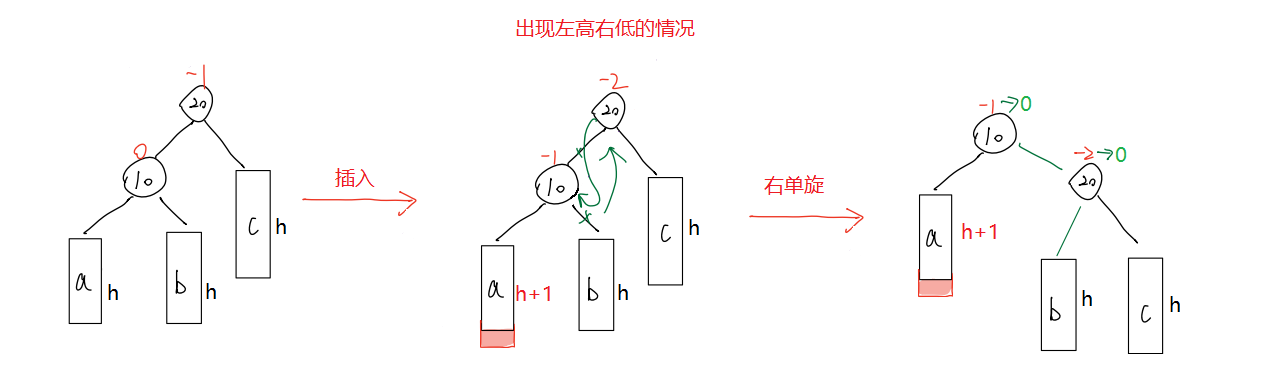
为什么能这样旋转?
- b在20的左子树,肯定比20小,故能作20的左子树
- 20和b都大于10,故以20为根的子树能作10的右子树
💬 代码实现
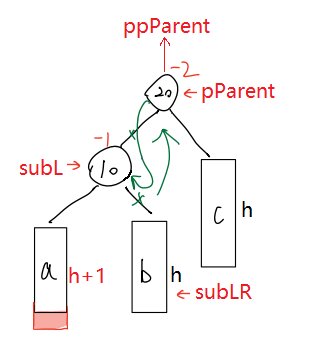
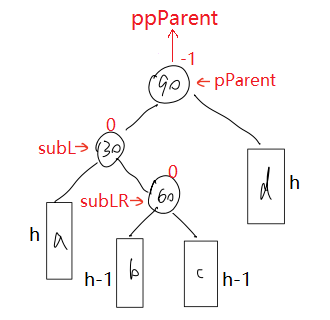
// 左左--右单旋
void RotateR(ptr pParent)
{
ptr subL = pParent->_left;
ptr subLR = subL->_right;
ptr ppParent = pParent->_parent;
//建立新的链接关系
//1.pParent(父)和subLR(子)
pParent->_left = subLR;
if (subLR)
subLR->_parent = pParent;
//2.subL(父)和pParent(子)
subL->_right = pParent;
pParent->_parent = subL;
//3.ppParent(父)和subL(子)
if (pParent == _root)
{
_root = subL;
}
else
{
if (ppParent->_left == pParent)
{
ppParent->_left = subL;
}
else
{
ppParent->_right = subL;
}
}
subL->_parent = ppParent;
//4.更新平衡因子
subL->_bf = pParent->_bf = 0;
}
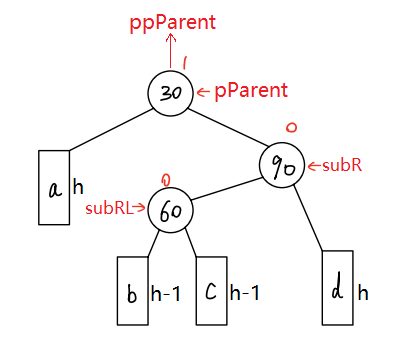
- 右右 —— 左单旋
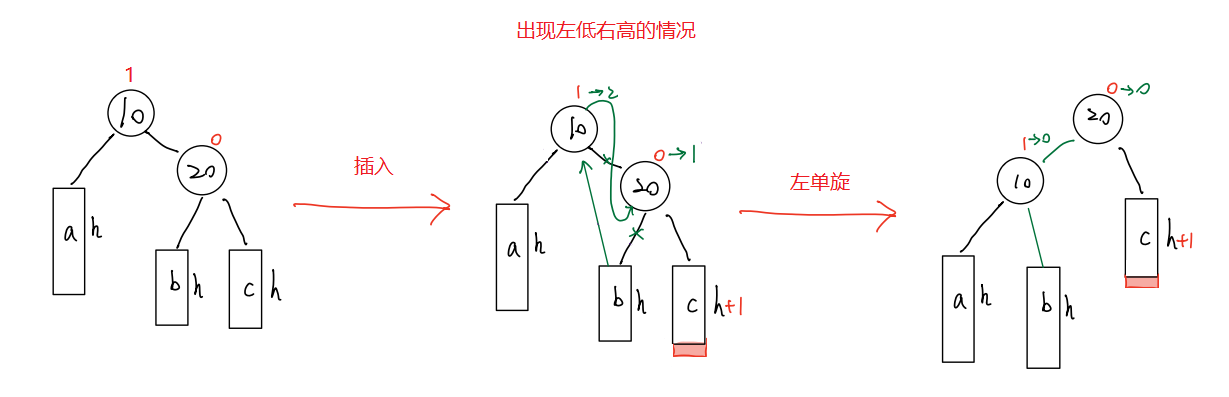
💬 代码实现
// 右右--左单旋
void RotateL(ptr pParent)
{
ptr subR = pParent->_right;
ptr subRL = subR->_left;
ptr ppParent = pParent->_parent;
pParent->_right = subRL;
if (subRL)
subRL->_parent = pParent;
subR->_left = pParent;
pParent->_parent = subR;
if (pParent == _root)
{
_root = subR;
}
else
{
// 是否可以用函数参数引用 ptr& pParent 优化?
//if (subR->_val < ppParent->_val)
if (ppParent->_left == pParent)
{
ppParent->_left = subR;
}
else
{
ppParent->_right = subR;
}
}
subR->_parent = ppParent;
subR->_bf = pParent->_bf = 0;
}
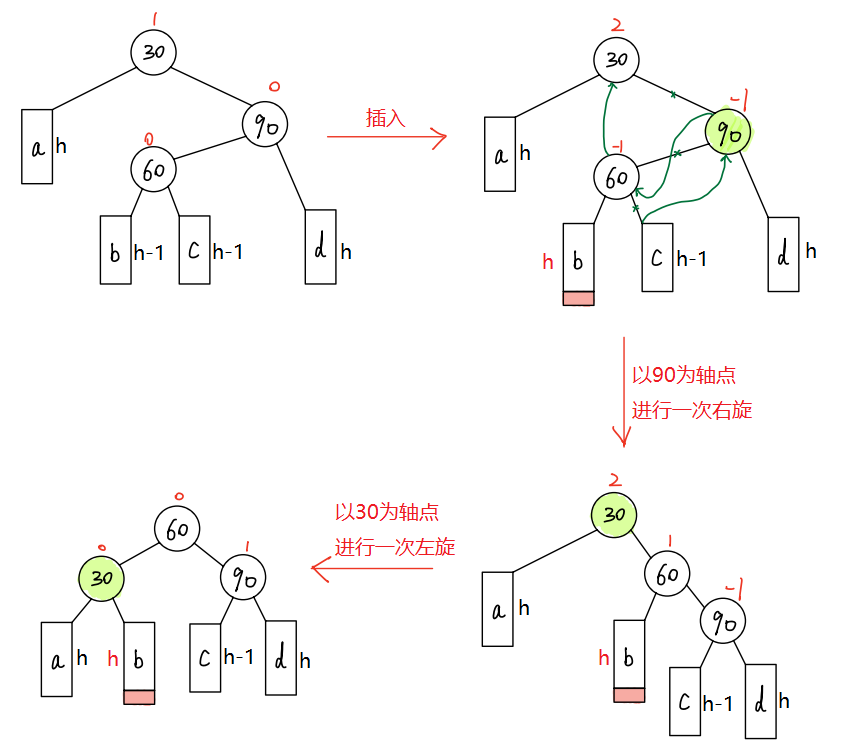
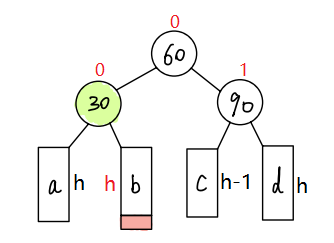
- 左右 —— 左右双旋
🔎我们可以复用RotateL(左单旋)和RotateR(右单旋)来实现右左双旋,但需要注意的是,这两个函数会把平衡因子直接更新为0,但是观察右左双旋的过程图,发现结果所更新节点的平衡因子不全为0。因此,右左双旋要自己更新平衡因子,不能依赖于RotateL和RotateR。
- 当在c子树插入新节点时,旋转后的结果
-
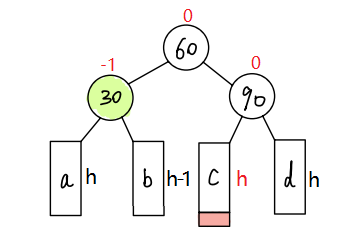
当在b子树插入新节点时,旋转后的结果
-
特殊情况,当h==0时,30的右子树为空,60就是新插入节点。最终平衡因子全为0。
💬 代码实现
🔎通过上两张图可以发现,当在c子树插入时,最终subL指向节点的平衡因子为-1,其他两个为0;当在b子树插入时,最终pParent指向节点的平衡因子为1,其他两个为0。因此,判断在哪颗树插入时决定最终如何更新平衡因子的关键,而插入后且调整前的subLR的平衡因子就可以判断。插入后且调整前,若subLR的平衡因子为1,则是在c子树插入;若subLR的平衡因子为-1,则是在b子树插入。还有h==0的特殊情况,此时subLR的平衡因子为0,作特殊处理。
void RotateLR(ptr pParent)
{
ptr subL = pParent->_left;
ptr subLR = subL->_right;
int bf = subLR->_bf; // 保存插入后调整前subLR的平衡因子
// 两次旋转
RotateL(subL);
RotateR(pParent);
// 更新平衡因子
if (bf == 1)
{
subLR->_bf = 0;
subL->_bf = -1;
pParent->_bf = 0;
}
else if (bf == -1)
{
subLR->_bf = 0;
subL->_bf = 0;
pParent->_bf = 1;
}
else if (bf == 0)
{
subLR->_bf = 0;
subL->_bf = 0;
pParent->_bf = 0;
}
else
{
assert(false);
}
}
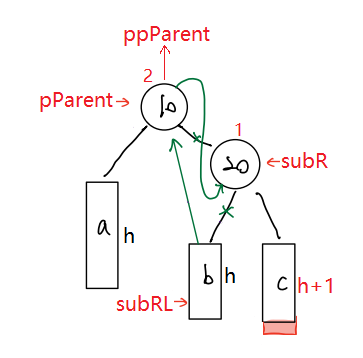
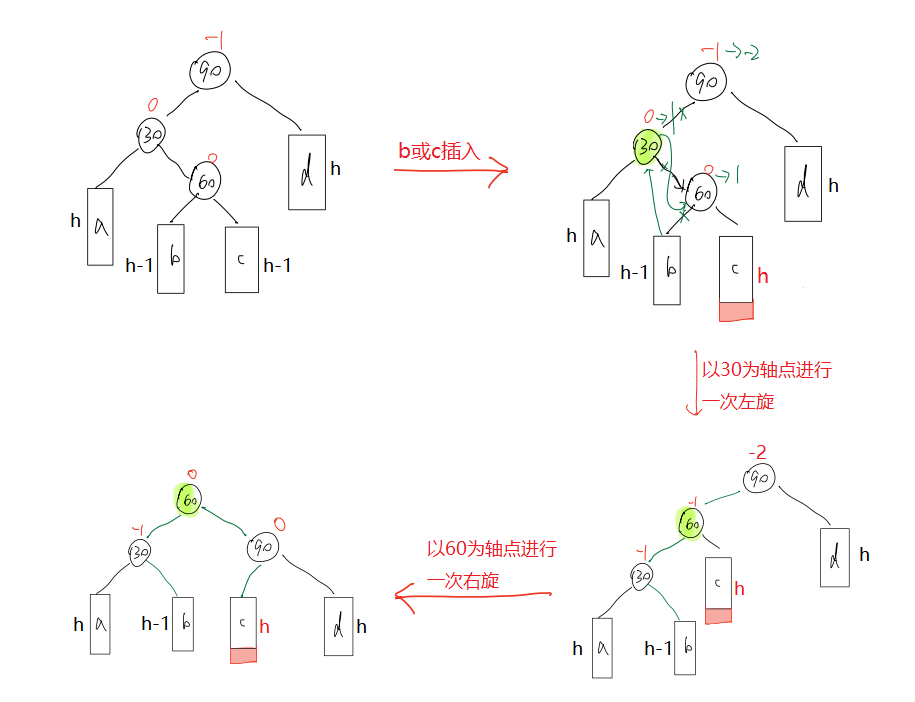
- 右左 —— 右左双旋
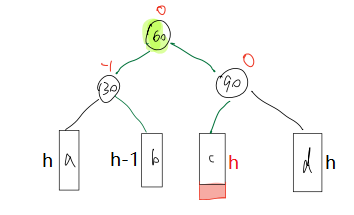
- 当在c子树插入新节点时,旋转后的结果
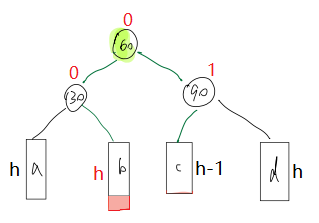
- 当在b子树插入新节点时,旋转后的结果
💬代码实现
void RotateRL(ptr pParent)
{
ptr subR = pParent->_right;
ptr subRL = subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(pParent);
if (bf == 1)
{
subRL->_bf = 0;
subR->_bf = 0;
pParent->_bf = -1;
}
else if (bf == -1)
{
subRL->_bf = 0;
subR->_bf = 1;
pParent->_bf = 0;
}
else if (bf == 0)
{
subRL->_bf = 0;
subR->_bf = 0;
pParent->_bf = 0;
}
else
{
assert(false);
}
}
4.4 AVL树最终代码
// AVL树的节点
template <class T>
struct AVLTreeNode
{
AVLTreeNode(const T& val)
:_val(val)
,_left(nullptr)
,_right(nullptr)
,_parent(nullptr)
,_bf(0)
{}
AVLTreeNode* _left;
AVLTreeNode* _right;
AVLTreeNode* _parent;
T _val;
int _bf;// 平衡因子
};
// AVL树
template <class T>
class AVLTree
{
typedef AVLTreeNode<T> node;
typedef AVLTreeNode<T>* ptr;
public:
// 构造函数
AVLTree()
:_root(nullptr)
{}
// 析构函数
~AVLTree()
{
destroy(_root);
}
// 中序遍历
void InOrder()
{
_inorder(_root);
}
// 插入新节点
bool insert(const T& val)
{
// 先按二叉搜索树规则,找到插入位置
ptr cur = _root;
ptr parent = nullptr;
while (cur)
{
if (val < cur->_val)
{
parent = cur;
cur = cur->_left;
}
else if (val > cur->_val)
{
parent = cur;
cur = cur->_right;
}
else
{
// 相同元素不能插入
return false;
}
}
// 创建新节点并插入
cur = new node(val);
if (_root == nullptr)
{
_root = cur;
return true;
}
else
{
if (cur->_val < parent->_val)
{
parent->_left = cur;
cur->_parent = parent;
}
else
{
parent->_right = cur;
cur->_parent = parent;
}
}
// 更新平衡因子
while (parent)
{
if (cur == parent->_left)
{
(parent->_bf)--;
}
else
{
(parent->_bf)++;
}
// 1.parent的_bf更新后为0
if (parent->_bf == 0)
{
// 插入成功
break;
}
// 2.parent的_bf更新后为1或-1,此时需要继续向上更新平衡因子
else if (parent->_bf == 1 || parent->_bf == -1)
{
//持续往上更新
cur = parent;
parent = parent->_parent;
}
// 3.parent的_bf更新后为2或-2,此时需要旋转,旋转后以parent为根的子树为平衡二叉树,不需要在继续向上更新平衡因子
else if (parent->_bf == 2 || parent->_bf == -2)
{
if (parent->_bf == -2 && cur->_bf == -1)
{
RotateR(parent);
}
else if (parent->_bf == 2 && cur->_bf == 1)
{
RotateL(parent);
}
else if (parent->_bf == -2 && cur->_bf == 1)
{
RotateLR(parent);
}
else if (parent->_bf == 2 && cur->_bf == -1)
{
RotateRL(parent);
}
else
{
assert(false);
}
break;
}
}
return true;
}
bool IsBalance()
{
return is_balance(_root);
}
int Height()
{
return get_height(_root);
}
private:
// 检查该树是否平衡
bool is_balance(ptr root)
{
if (root == nullptr)
return true;
int leftHeight = get_height(root->_left);
int rightHeight = get_height(root->_right);
if (rightHeight - leftHeight != root->_bf)
{
cout << root->_val << "平衡因子异常" << endl;
}
return (abs(rightHeight - leftHeight) == 1 || rightHeight == leftHeight)
&& is_balance(root->_left)
&& is_balance(root->_right);
}
// 获取以root为根的子树的高度
int get_height(ptr root)
{
if (root == nullptr)
return 0;
return 1 + max(get_height(root->_left), get_height(root->_right));
}
// 析构函数的子函数
void destroy(ptr root)
{
if (root == nullptr)
return;
destroy(root->_left);
destroy(root->_right);
delete root;
}
void _inorder(ptr root)
{
if (root == nullptr)
return;
_inorder(root->_left);
cout << root->_val << " ";
_inorder(root->_right);
}
// 左左--右单旋
void RotateR(ptr pParent)
{
ptr subL = pParent->_left;
ptr subLR = subL->_right;
ptr ppParent = pParent->_parent;
//1.pParent(父)和subLR(子)
pParent->_left = subLR;
if (subLR)
subLR->_parent = pParent;
//2.subL(父)和pParent(子)
subL->_right = pParent;
pParent->_parent = subL;
//3.ppParent(父)和subL(子)
if (pParent == _root)
{
_root = subL;
}
else
{
// 是否可以用函数参数引用 ptr& pParent 优化?
if (ppParent->_left == pParent)
{
ppParent->_left = subL;
}
else
{
ppParent->_right = subL;
}
}
subL->_parent = ppParent;
//4.更新平衡因子
subL->_bf = pParent->_bf = 0;
}
// 右右--左单旋
void RotateL(ptr pParent)
{
ptr subR = pParent->_right;
ptr subRL = subR->_left;
ptr ppParent = pParent->_parent;
pParent->_right = subRL;
if (subRL)
subRL->_parent = pParent;
subR->_left = pParent;
pParent->_parent = subR;
if (pParent == _root)
{
_root = subR;
}
else
{
// 是否可以用函数参数引用 ptr& pParent 优化?
//if (subR->_val < ppParent->_val)
if (ppParent->_left == pParent)
{
ppParent->_left = subR;
}
else
{
ppParent->_right = subR;
}
}
subR->_parent = ppParent;
subR->_bf = pParent->_bf = 0;
}
void RotateLR(ptr pParent)
{
ptr subL = pParent->_left;
ptr subLR = subL->_right;
int bf = subLR->_bf;
RotateL(subL);
RotateR(pParent);
if (bf == 1)
{
subLR->_bf = 0;
subL->_bf = -1;
pParent->_bf = 0;
}
else if (bf == -1)
{
subLR->_bf = 0;
subL->_bf = 0;
pParent->_bf = 1;
}
else if (bf == 0)
{
subLR->_bf = 0;
subL->_bf = 0;
pParent->_bf = 0;
}
else
{
assert(false);
}
}
void RotateRL(ptr pParent)
{
ptr subR = pParent->_right;
ptr subRL = subR->_left;
int bf = subRL->_bf;
RotateR(subR);
RotateL(pParent);
if (bf == 1)
{
subRL->_bf = 0;
subR->_bf = 0;
pParent->_bf = -1;
}
else if (bf == -1)
{
subRL->_bf = 0;
subR->_bf = 1;
pParent->_bf = 0;
}
else if (bf == 0)
{
subRL->_bf = 0;
subR->_bf = 0;
pParent->_bf = 0;
}
else
{
assert(false);
}
}
ptr _root;
};
完。















 6033
6033











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









