






- 排序:将一组杂乱无章的数据按一定的规律顺次排列起来,可以看作是线性表的一种操作。
- 内排序:排序期间元素全部存放在内存中的排序。
- 并非所有内部排序算法都基于比较操作,基数排序就不基于比较。
- 排序算法的好坏如何衡量?
- 时间效率——排序速度(即排序所花费的全部比较次数)
- 空间效率——占内存辅助空间的大小
- 稳定性——若两个记录A和B的关键字值相等,但排序后A、B的先后次序保持不变,则称这种排序算法是稳定的。
- 算法是否具有稳定性并不能衡量一个算法的优劣,它主要是对算法性质进行描述,内部排序算法的性能取决于算法的时间复杂度和空间复杂度,时间复杂度一般是由比较和移动次数决定。
- “快速排序”是否真的比任何排序算法都快?
基本上是,因为每趟可以确定的数据元素是呈指数增加的。
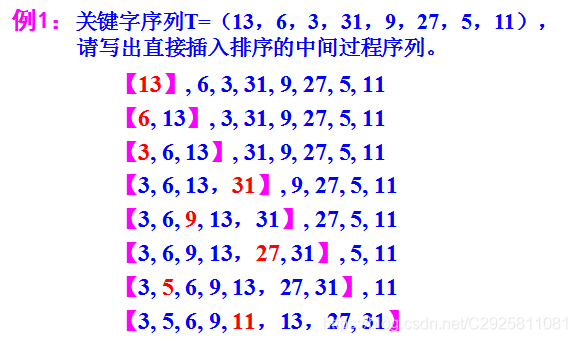
1 插入排序
插入排序的基本思想是:
每步将一个待排序的对象,按其关键码大小,插入到前面已经排好序的一组对象的适当位置上,直到对象全部插入为止。
简言之,边插入边排序,保证子序列中随时都是排好序的。
在已形成的有序表中线性查找,并在适当位置插入,把原来位置上的元素向后顺移。
时间效率:
因为在最坏情况下,所有元素的比较次数总和为(0+1+…+n-1)→O(n2)。
其他情况下也要考虑移动元素的次数。 故时间复杂度为O(n2)
空间效率:
仅占用1个缓冲单元——O(1)
算法的稳定性:
因为25*排序后仍然在25的后面——稳定
直接插入排序算法的实现:
void InsertSort ( int arr[],int n ) {
int i,j,temp; //temp暂存待插关键字
for ( i = 1; i <=n; i++) //依次将A[2]~A[n]插入到前面已排序的序列
{
temp=arr[i];
j=i-1 ; //从i-1往前扫描
while(j>=0 && temp<arr[j])
{
arr[j+1]= arr[j]; //向后挪位
--j ;
}
arr[j+1]= temp; //复制到插入元素
}
}
直接插入排序适用于顺序存储和链式存储的线性表
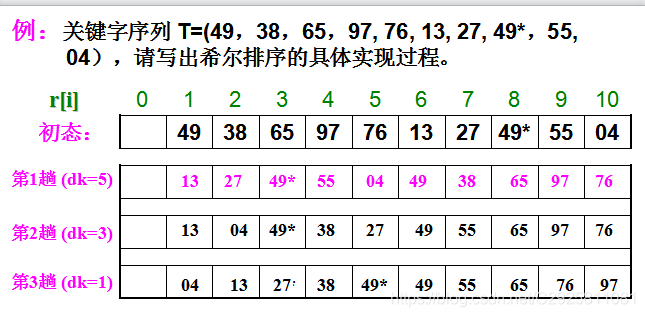
2 希尔(shell)排序
基本思想:
先将整个待排记录序列分割成若干子序列,分别进行直接插入排序,待整个序列中的记录“基本有序”时,再对全体记录进行一次直接插入排序。
优点:
让关键字值小的元素能很快前移,且序列若基本有序时,再用直接插入排序处理,时间效率会高很多。
void ShellSort(ElementType A[], int N) {
/* 希尔增量序列 */
for (D = N / 2; D > 0; D /= 2) { //D=1即直接插入排序
/* 插入排序 */
for (i = D; i < N; i++) {
tmp = A[i];
for(j = i; j >= D && A[j - D] > tmp; i -= D) {
A[j] = A[j - D];
}
A[i] = tmp;
}
}
}
时间复杂度
1.原始数据如下共有16个数据:
1 | 9 | 2 | 10 | 3 | 11 | 4 | 12 | 5 | 13 | 6 | 14 | 7 | 15 | 8 | 16 |
2.进行 8 间隔排序后(未发生变化):
1 | 9 | 2 | 10 | 3 | 11 | 4 | 12 | 5 | 13 | 6 | 14 | 7 | 15 | 8 | 16 |
3.进行 4 间隔排序后(未发生变化):
1 | 9 | 2 | 10 | 3 | 11 | 4 | 12 | 5 | 13 | 6 | 14 | 7 | 15 | 8 | 16 |
4.进行 2 间隔排序后(未发生变化):
1 | 9 | 2 | 10 | 3 | 11 | 4 | 12 | 5 | 13 | 6 | 14 | 7 | 15 | 8 | 16 |
5.进行 1 间隔排序后(1间隔排序也就是插入排序):
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 | 16 |
最坏情况(与插入排序一样)
T = O ( n 2 ) T = O(n^2) T=O(n2)
结论:
那么来观察它的间隔数 8 4 2 1,发现其间隔增量元素并不互质,则小的增量根本不起作用
稳定性:
由于不是相邻元素的比较和交换,它是不稳定的
希尔排序仅适用于线性表为顺序存储的情况
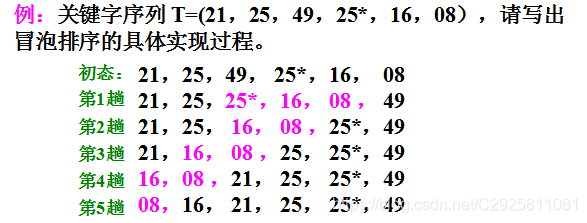
3 冒泡排序
基本思路:
每趟不断将记录两两比较,并按“前小后大”(或“前大后小”)规则交换。
优点:
每趟结束时,不仅能挤出一个最大值到最后面位置,还能同时部分理顺其他元素;一旦下趟没有交换发生,还可以提前结束排序。
前提:顺序存储结构
void BubleSort(int arr[]),int n)
{
int i,j,flag;
int temp;
for(i=n-1;i>=1;--i)
{
flag=0; //表示本趟冒泡是否发生交换的标志
for(int j=1;j<=i;j++)
if(arr[j-1]>arr[j])
{
temp=arr[j];
arr[j]=arr[j-1];
arr[j-1]=temp;
flag=1; //发生交换则置flag为1
}
if(flag==0) //未发生交换,结束
return;
}
}
冒泡排序的算法分析:
- 时间效率:O(n2) —因为要考虑最坏情况
- 空间效率:O(1) —只在交换时用到一个缓冲单元
- 稳 定 性: 稳定 —25和25*在排序前后的次序未改变
- 冒泡排序的优点:每一趟整理元素时,不仅可以完全确定一个元素的位置(挤出一个泡到表尾),还可以对前面的元素作一些整理,所以比一般的排序要快。
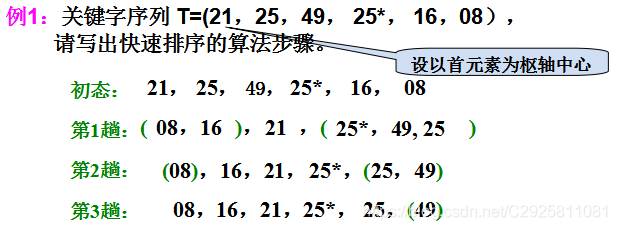
4 快速排序
基本思想:
从待排序列中任取一个元素 (例如取第一个) 作为中心,所有比它小的元素一律前放,所有比它大的元素一律后放,形成左右两个子表;然后再对各子表重新选择中心元素并依此规则调整,直到每个子表的元素只剩一个。此时便为有序序列了。
优点:
因为每趟可以确定不止一个元素的位置,而且呈指数增加,所以特别快!
前提:
顺序存储结构
void QuickSort(int A[],int low,int high)
{
if(low<high){ //明确的递归终止条件
int pivotpos=Partition(A,low,high); //划分
QuickSort(A,low,pivotpos-1);
QuickSort(A,pivotpos+1,high);
}
}
int Partition(int A[],int low,int high) //将待排序的数组划分两个子表的操作
{
int pivot=A[low]; //将当前表中的第一个元素设为比较值,对表进行划分
while(low<high){ //递归跳出的条件
while(low<high&&A[high]>=pivot)
--high;
A[low]=A[high]; //将比比较值小的元素移动到左端
while(low<high&&A[low]<=pivot)
++low;
A[high]=A[low]; //将比比较值大的元素移动到右端
}
A[low]=pivot; //比较元素存放在最终位置
return low; //返回存放比较值的最终位置
}
快排算法分析:
- 时间效率:O(nlog2n) —因为每趟确定的元素呈指数增加
- 空间效率:O(log2n)—因为递归要用栈(存每层low,high和pivot)
- 稳 定 性: 不 稳 定 —因为有跳跃式交换。
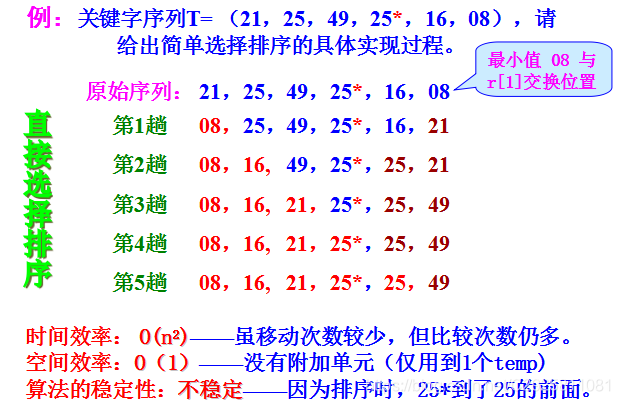
5 选择排序
选择排序的基本思想:
每经过一趟比较就找出一个最小值,与待排序列最前面的位置互换即可。
——首先,在n个记录中选择最小者放到r[1]位置;然后,从剩余的n-1个记录中选择最小者放到r[2]位置;…如此进行下去,直到全部有序为止。
优点:实现简单
缺点:每趟只能确定一个元素,表长为n时需要n-1趟
前提:顺序存储结构
void SelectionSort(ElementType A[], int N)
{
for (i = 0; i < N; i++) {
/* 从 A[i] 到 A[N - 1] 中找最小元素,并将其位置赋值给 MinPosition */
MinPosition = ScanForMin(A, i, N - 1);
/* 将未排序部分的最小元素换到有序部分的最后位置 */
Swap(A[i], A[MinPosition]);
}
}
6 堆排序
- 堆的定义:设有n个元素的序列 k1,k2,…,kn,当且仅当满足下述关系之一时,称之为堆。
解释:如果让满足以上条件的元素序列 (k1,k2,…,kn)顺次排成一棵完全二叉树,则此树的特点是:树中所有结点的值均大于(或小于)其左右孩子,此树的根结点(即堆顶)必最大(或最小)。
- 怎样建堆?
步骤:从最后一个非终端结点开始往前逐步调整,让每个双亲大于(或小于)子女,直到根结点为止。
堆排序算法分析:
- 时间效率: O(nlog2n)。因为整个排序过程中需要调用n-1次HeapAdjust( )算法,而算法本身耗时为log2n;
- 空间效率:O(1)。仅在第二个for循环中交换记录时用到一个临时变量temp。
稳定性: 不稳定。- 优点:对小文件效果不明显,但对大文件有效。
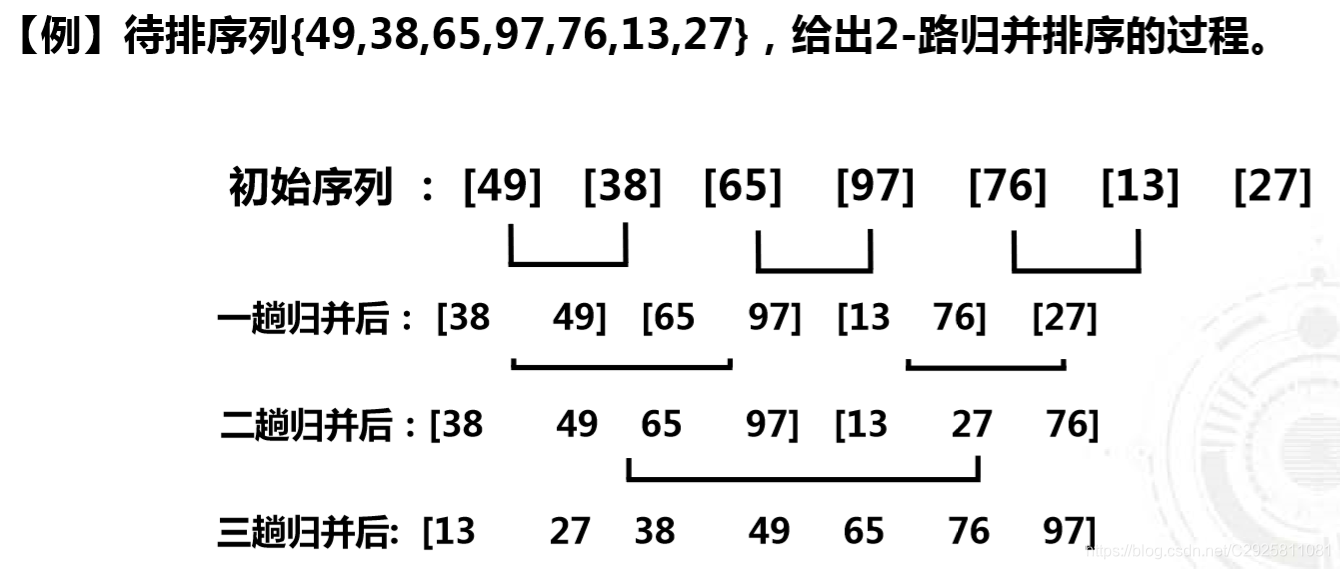
7 归并排序
归并排序算法的基本思想 :
(1) 初始无序序列看成n个有序子序列,每个子序列长度为1;
(2) 两两合并,得到└n/2┘个长度为2或1的有序子序列;
(3) 重复步骤2直至得到一个长度为n的有序序列为止。
两个有序表合并成一个有序表
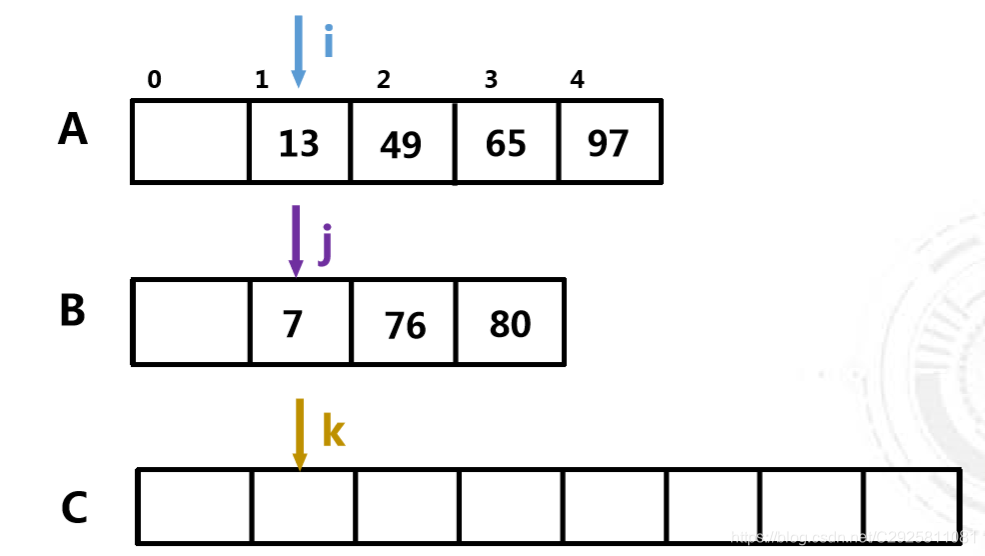
合并算法:
//将有序表A[low..mid]和A[mid+1,high] 归并为有序表B[low..high]
void Merge(ElementType A[], ElementType B[], int low, int mid, int high){
i = low; j=mid+1; k=low;
while (i <=mid && j <=high) {
if (A[i] < A[j]) B[k++] = A[i++];
else B[k++] = A[j++];
}
while (i <=mid) B[k++] = A[i++];
while (j <= high) B[k++] = A[j++];
}
给定区间的归并算法 :
//将A[low…high]中的序列归并排序后放到B[low…high]中
void MSort(ElementType A[], ElementType B[], int low, int high){
if (low==high) B[low]=A[low];
else {
mid=(low+high)/2; //将当前序列一分为二,求出分裂点mid
Msort(A, S, low, mid);
//对子序列A[low..mid]递归归并排序结果放入S[low..mid]
Msort(A, S, mid+1,high);
//对子序列A[mid+1..high]递归归并排序,结果放入S[mid+1..high]
Merge(S, B, low, mid, high);
//将S[low..mid]和S[mid+1..high]归并到B[low..high]
}
}
归并排序算法实现:
void MergeSort(ElementType A[]) { //对顺序表A做归并排序
Msort(A, C, 1, A.length);
}
归并排序算法分析:
- 时间效率:O(nlog2n)
- 空间效率:O(n)
- 稳 定 性:稳定
8 内排序代码一览
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<time.h>
#include<Windows.h>
typedef int keytype;
typedef struct {
keytype key;/*关键字码*/
}RecType;
int s[50][2];/*辅助栈s*/
void PrintArray(RecType R[],int n)
{
int i;
for(i=0;i<n;i++)
printf("%6d",R[i].key);
printf("\n");
}
void InsertSort(RecType R[],int n)/*用直接插入排序法对R[n]进行排序*/
{
int i,j;
RecType temp;
for(i=0;i<=n-2;i++)
{
temp=R[i+1];
j=i;
while (temp.key<=R[j].key && j>-1)
{
R[j+1]=R[j];
j--;
}
R[j+1]=temp;
}
}
void ShellInsert(RecType *r,int dk,int n)
{
int i,j;
keytype temp;
for(i=dk; i<n; ++i )
if(r[i].key <r[i-dk].key ) //将r[i]插入有序子表
{
temp=r[i].key;
r[i].key=r[i-dk].key;
for(j=i-2*dk;j>-1 && temp<r[j].key; j-=dk )
r[j+dk].key=r[j].key; // 记录后移
r[j+dk].key = temp; // 插入到正确位置
}
}
void ShellSort(RecType *L,int dlta[],int t,int n)/*希尔排序*/
{
// 按增量序列 dlta[t-1] 对顺序表L作希尔排序
int k;
for(k=0;k<t;k++)
ShellInsert(L,dlta[k],n); //一趟增量为 dlta[k] 的插入排序
} // ShellSort
void CreatArray(RecType R[],int n)
{
int i;
Sleep(1000);
srand( (unsigned)time( NULL ) );
for(i=0;i<n;i++)
R[i].key=rand()%1000;
}
void BubbleSort(RecType R[],int n) /*冒泡排序*/
{
int i,j,flag;
keytype temp;
for(i=0;i<n-1;i++)
{
flag=0;
for(j=0;j<n-i-1;j++)
{
if(R[j].key>R[j+1].key)
{
temp=R[j].key;
R[j].key=R[j+1].key;
R[j+1].key=temp;
flag=1;
}
}
if(flag==0)break;
}
}
int Hoare(RecType r[],int l,int h)/*快速排序分区处理*/
{
int i,j;
RecType x;
i=l;j=h;x=r[i];
do{
while(i<j && r[j].key>=x.key)j--;
if(i<j)
{
r[i]=r[j];
i++;
}
while(i<j && r[i].key<=x.key)i++;
if (i<j)
{
r[j]=r[i];
j--;
}
}while(i<j);
r[i]=x;
return(i);
} /*Hoare*/
void QuickSort1(RecType r[],int n) /*快速排序非递归*/
{
int l=0,h=n-1,tag=1,top=0,i;
do{
while (l<h)
{
i=Hoare(r,l,h);
top++;
s[top][0]=i+1;
s[top][1]=h;
h=i-1;
}/*tag=0表示栈空*/
if (top==0)tag=0;
else
{
l=s[top][0];h=s[top][1];top--;
}
}while (tag==1); /*栈不空继续循环*/
} /*QuickSort1*/
void SelectSort(RecType R[],int n)/*直接选择排序*/
{
int i,j,k; RecType temp;
for(i=0;i<n-1;i++)
{
k=i;/*设第i个记录关键字最小*/
for(j=i+1;j<n;j++)/*查找关键字最小的记录*/
if(R[j].key<R[k].key)
k=j;/*记住最小记录的位置*/
if (k!=i) /*当最小记录的位置不为i时进行交换*/
{
temp=R[k];
R[k]=R[i];
R[i]=temp;
}
}
}
void HeapAdjust(RecType R[],int l,int m)/*堆排序筛选*/
{/*l表示开始筛选的结点,m表示待排序的记录个数。*/
int i,j;
RecType temp;
i=l;
j=2*i+1; /*计算R[i]的左孩子位置*/
temp=R[i]; /*将R[i]保存在临时单元中*/
while(j<=m-1)
{
if(j<m-1 && R[j].key<R[j+1].key)
j++; /*选择左右孩子中最大者,即右孩子*/
if(temp.key<R[j].key)/*当前结点小于左右孩子的最小者*/
{
R[i]=R[j];i=j;j=2*i+1;
}
else /*当前结点不小于左右孩子*/
break;
}
R[i]=temp;
}
void HeapSort(RecType R[],int n)/*堆排序*/
{
int j;
RecType temp;
for(j=n/2-1;j>=0;j--) /*构建初始堆*/
HeapAdjust(R,j,n);/*调用筛选算法*/
for(j=n;j>1;j--) /*将堆顶记录与堆中最后一个记录交换*/
{
temp=R[0];
R[0]=R[j-1];
R[j-1]=temp;
HeapAdjust(R,0,j-1);/*将R[0..j-1]调整为堆*/
}
}
void Merge(RecType aa[],RecType bb[],int l,int m,int n)
{/*将两个有序子序列aa[1…m]和aa[m+1,…n]合并为一个有序序列bb[1…n]*/
int i,j,k;
k=l;i=l;j=m+1;/*将i,j,k分别指向aa[1…m]、aa[m+1,…n]、bb[1…n]首记录*/
while (i<=m && j<=n) /*将aa中记录由小到大放入bb中*/
if(aa[i].key<=aa[j].key)
bb[k++]=aa[i++];
else
bb[k++]=aa[j++];
while (j<=n) /*将剩余的aa[j…n]复制到bb中*/
bb[k++]=aa[j++];
while (i<=m) /*将剩余的aa[i…m]复制到bb中*/
bb[k++]=aa[i++];
}
void MergeOne(RecType aa[],RecType bb[],int len,int n)
{/*从aa[1…n]]归并到bb[1…n],其中len是本趟归并中有序表的长度*/
int i;
for(i=0;i+2*len-1<=n;i=i+2*len)
Merge(aa,bb,i,i+len-1,i+2*len-1);/*对两个长度为len的有序表合并*/
if(i+len-1<n) /*当剩下的元素个数大于一个子序列长度len时*/
Merge(aa,bb,i,i+len-1,n);
else /*当剩下的元素个数小于或等于一个子序列长度len时*/
Merge(aa,bb,i,n,n); /*复制剩下的元素到bb中*/
}
void MergeSort(RecType aa[],RecType bb[],int n)//归并排序
{
int len=1; /*len是排序序列表的长度 */
while (len<n)
{
MergeOne(aa,bb,len,n-1);
MergeOne(bb,aa,2*len,n-1);
len=4*len;
}
}
int main()
{
int n,data[3]={4,2,1},cord;
RecType *r,*bb;
printf("Please input number:");
scanf("%d",&n);
r=(RecType *)malloc(sizeof(RecType)*n);
bb=(RecType *)malloc(sizeof(RecType)*n);
memset(bb,0,sizeof(RecType)*n);
do
{
printf("\n 主菜单 \n");
printf("1----插入排序\n");
printf("2----希尔排序\n");
printf("3----冒泡排序\n");
printf("4----快速排序\n");
printf("5----选择排序\n");
printf("6----堆排序\n");
printf("7----归并排序\n");
printf("8----退出\n");
scanf("%d",&cord);
switch(cord)
{
case 1:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
InsertSort(r,n);
PrintArray(r,n);
break;
case 2:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
ShellSort(r,data,3,n);
PrintArray(r,n);
break;
case 3:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
BubbleSort(r,n);
PrintArray(r,n);
break;
case 4:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
QuickSort1(r,n);
PrintArray(r,n);
break;
case 5:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
SelectSort(r,n);
PrintArray(r,n);
break;
case 6:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
HeapSort(r,n);
PrintArray(r,n);
break;
case 7:
memset(r,0,sizeof(RecType)*n);
CreatArray(r,n);
PrintArray(r,n);
MergeSort(r,bb,n);
PrintArray(r,n);
break;
case 8:
exit(0);
default:
cord=0;
}
}while(cord<=8);
return 0;
}
运行结果
常用排序算法时间复杂度和空间复杂度一览表
| 排序法 | 最差时间分析 | 平均时间复杂度 | 稳定度 | 空间复杂度 |
|---|---|---|---|---|
| 冒泡排序 | O(n^2) | O(n^2) | 稳定 | O(1) |
| 快速排序 | O(n^2) | O(n*log2n) | 不稳定 | O(log2n)~O(n) |
| 选择排序 | O(n^2) | O(n^2) | 稳定 | O(1) |
| 2-路归并排序 | O(n*log2n) | O(n*log2n) | 是 | O(n) |
| 插入排序 | O(n^2) | O(n^2) | 稳定 | O(1) |
| 堆排序 | O(n*log2n) | O(n*log2n) | 不稳定 | O(1) |
| 希尔排序 | O | O | 不稳定 | O(1) |














 6480
6480











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









