






作者 | dianyunPCL 编辑 | 点云PCL
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【目标检测】技术交流群
摘要
泊车辅助系统是智能驾驶车辆在低速和复杂城市环境中的重要应用,近年来一直是研究的热点。停车位检测是停车辅助系统的一个重要环节,其研究对象是停车场中具有对称结构的停车位。通过分析和调查由传感器测量的停车位信息,可以实现对停车位的可靠检测。首先,本文讨论了停车位检测过程中的主要问题,阐述了停车位识别方法的研究意义和研究现状。此外,还进一步介绍了一些停车位检测方法,包括基于自由空间的方法、基于停车位标记的方法、用户交互的方法和基于基础设施的方法,这些方法都属于停车位选择方法。最后,本文总结了停车位检测方法,为今后的研究提供了明确的方向。
介绍
随着经济和社会的快速发展,中国的机动车数量迅速增加。相比之下,停车场建设相对缓慢,停车难问题日益突出。停车位检测方法的研究不仅可以有效提高停车位的利用率,还可以缓解停车位资源有限的问题,并满足停车场的要求,包括效率、安全和管理,目前,有许多停车位的检测方法。根据所选传感器的类别,它们可以分为视觉和非视觉检测方法。基于视觉的检测方法主要使用单眼相机、双目相机或RGB深度(RGB-D)相机。通过使用相机进行图像采集,基于捕获的图像,计算机视觉算法被应用于检测停车位。这些方法提供了实时视觉辅助和丰富的图像信息,但可能会受到环境因素的极大影响。它们通常在计算上也很昂贵,并且在黑暗环境中表现不佳。相比之下,非视觉检测方法主要使用超声波传感器、短程雷达或激光扫描仪。通过这种方式,他们向周围环境发送微波信号,并根据“飞行时间”(TOF)确定传感器自身到环境的距离。这种微波传感器与近距离的照明条件无关。数据处理是直接的,因此速度很快,通常是实时的。因此,在大多数场景下,它在测量距离和精度方面都可以满足停车测量的要求,但也存在一些缺点,如光束角度大、方向差、分辨率低、工作距离短等缺点。
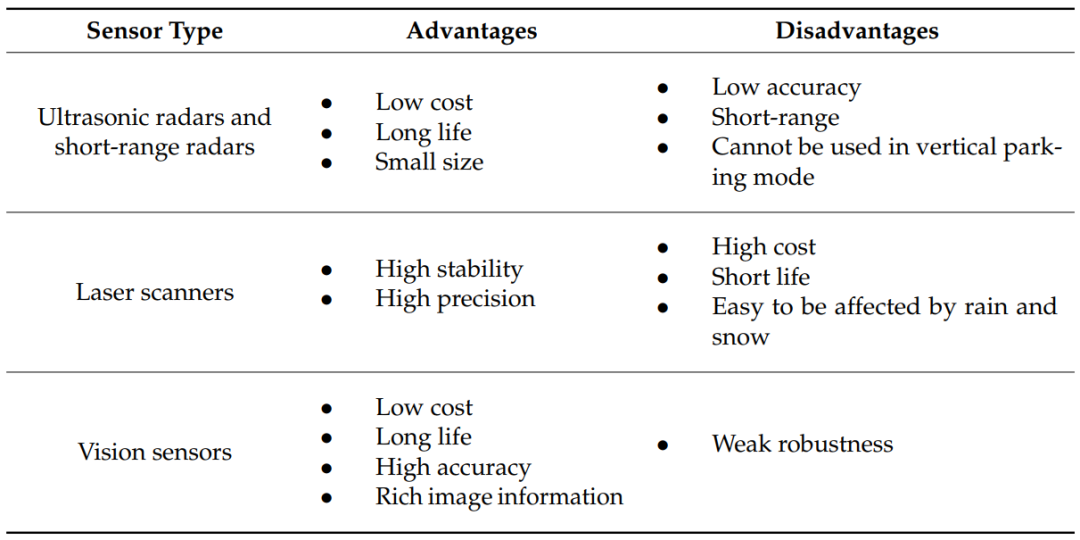
表1 各种传感器的优点和缺点
在对相关文献进行整理和总结后,本文对停车位检测方法进行了细分,包括基于视觉的停车位检测和非基于视觉的车位检测方法。基于视觉的停车检测方法可以进一步分为停车位标记和基于用户交互的方法。此外,非可视化停车位检测分为基于自由空间的方法和基于基础设施的方法。根据有效停车位的推理过程,每个方法都包含几个子方法,如图1所示。
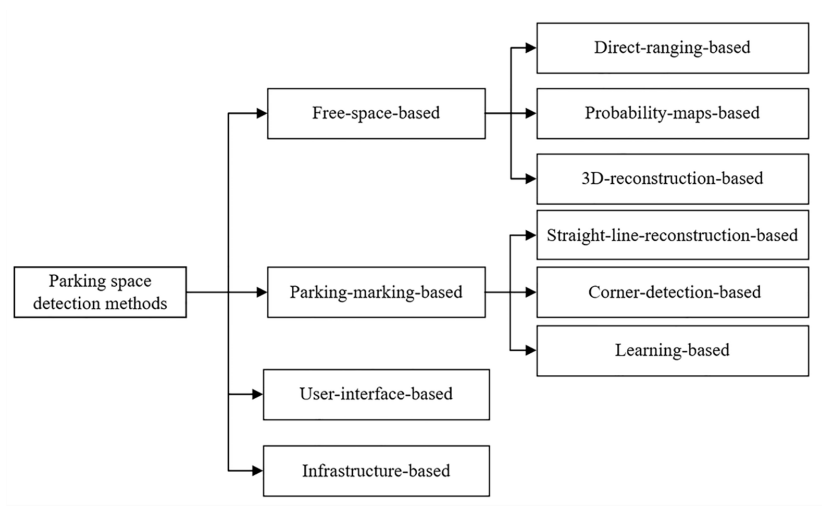
图1 停车位检测方法分类
基于自由空间的方法
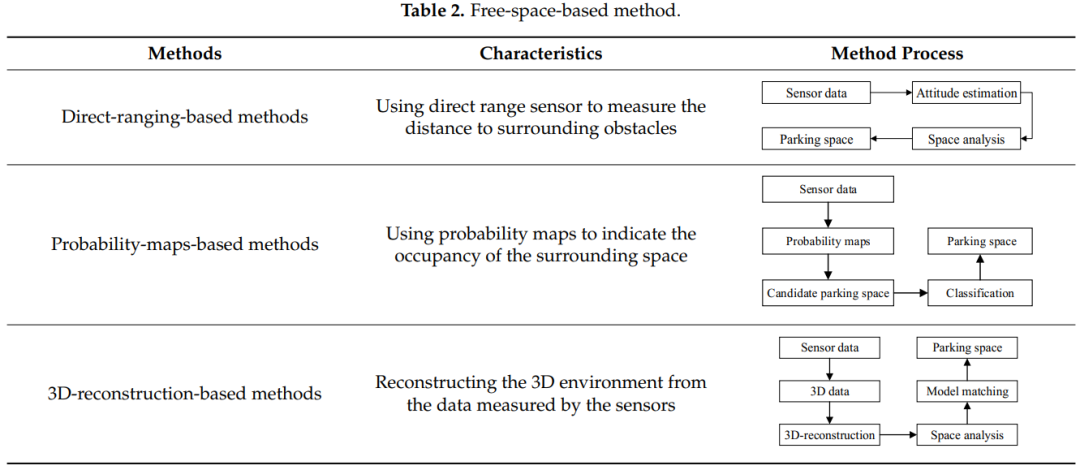
基于自由空间方法是通过识别相邻车辆的周围环境并分析车辆周围的空间结构来实现对可用停车位的检测。常用的传感器有超声波传感器、激光传感器、立体相机、深度相机和其他相机。这些传感器可以感知车辆周围的环境,并为停车位检测提供可靠的参考数据。根据停车位识别方法的不同,基于自由空间的方法可进一步分为基于直接测距的方法、基于概率图的方法和基于三维重建的方法。本节将分析并介绍这三种方法的特点,如表2所示
基于直接测距的停车位检测方法
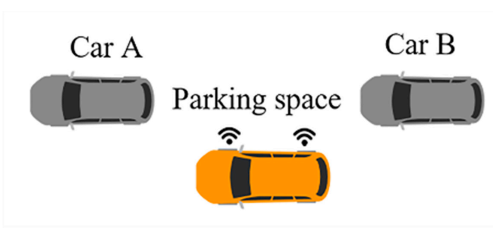
图2 基于直接测距的方法
基于概率图的停车位检测方法
目前,基于直接测距的停车位探测方法存在许多问题。因此,研究人员使用地图表示方法和数理统计将环境划分为一系列小网格,每个网格都有一个可能的值来表示网格被占用的概率。车辆周围的停车位由网格占用度来估计。这种方法被称为基于概率图的停车位检测方法。
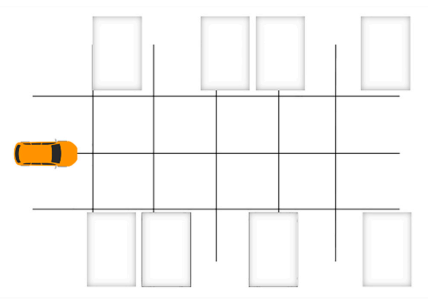
图3 占用栅格地图
基于三维重建的停车位检测方法
基于3D重建的停车位检测方法通过重建车辆周围的三维空间模型来实现停车位的检测。在传统的3D重建过程中,存在大量的伪3D点,并且3D点的密度与检测到的特征数量呈线性关系,无法控制,通过提高3D点的跟踪效率、跟踪密度和重建障碍物模型,可以提高停车位的检测精度。
总结
目前,基于自由空间检测停车位的方法已成为主流方法,该方法只需在车辆上安装廉价的测距传感器,同时,这种方法也存在一定的缺点。该方法的检测性能完全取决于停车位相邻位置停放的车辆,当周围没有停放的车辆时,此方法将失败。
基于停车位标记的方法
基于自由空间的停车位检测方法是最广泛使用的方法,但其性能取决于相邻车辆的姿态和所用传感器的测量精度。因此,如果没有相邻车辆,基于自由空间的停车位检测方法无法正常工作,无法满足驾驶员对停车位检测的需求。因此,研究人员提出了一种基于停车位标记的停车位检测方法,利用计算机视觉技术通过从图像中识别停车位标记来确定停车位的位置。根据检测技术的不同,它可以分为三类:基于直线检测的方法、基于角点检测的方法和基于学习的检测方法。本节将分析并介绍这三种检测方法,如表3所示。
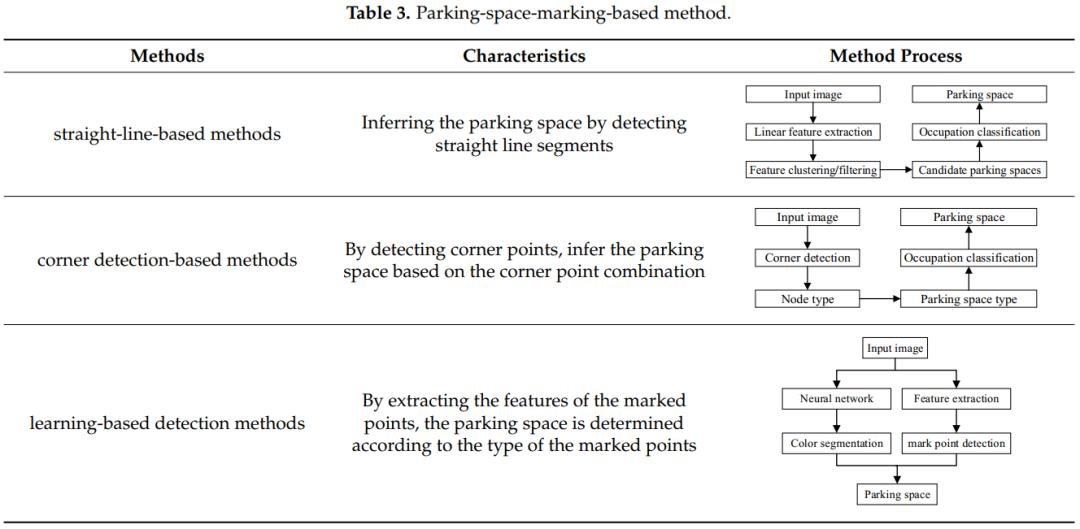
基于直线的停车位检测方法
停车位标记是指特定停车场中由附着在地面上的指南和分隔线组成的停车位。有很多种类型,如矩形停车位、平行四边形停车位和菱形停车位。由于停车位标记由直线段组成,因此检测直线对于寻找停车位至关重要.
基于角点的停车位检测方法
基于传统的停车位直线检测的方法只能检测一种或两种类型的停车位,但停车位的类型很多,如菱形或平行四边形。基于角点特征的停车位检测方法可以检测各种停车位类型并实现各种停车操作。
基于学习的方法
该领域中几乎所有现有的最先进的方法都基于低级视觉特征,例如线段和角点,并检测一些低级视觉算法。由于不可重复的环境变化导致的噪声、杂波或照明变化,这些特征无法明显区分,更糟糕的是,它们是不稳定的。因此,如何在复杂多变的环境中使用视觉方法高效准确地检测停车位仍然是一个难题。为了解决这一问题,研究人员使用深度学习技术,通过基于学习的方法构建神经网络模型,从大量正样本和负样本中训练模型,并实现停车位的检测。
总结:基于停车位标记的方法通过分析道路上的标记来识别停车位,与基于自由空间的方法相反,其性能不取决于相邻停放车辆的存在和位置。然而,这些方法只能在有停车位标记的停车场中正常工作,并且对于停车位标记被遮挡或模糊的情况不适用。
总结与展望
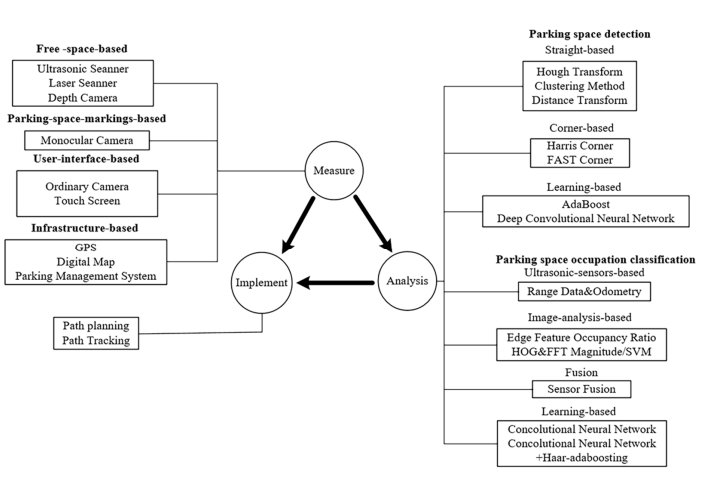
图8 停车位检测方法概述
近年来,随着驾驶员对汽车要求的不断提高,停车辅助系统得到了快速发展,停车位检测技术也得到了改进。图8总结了本文中涉及的一些方法和关键技术,根据停车位检测关键技术的不同,本文对停车位检测的相关研究进行了阐述。它分析并介绍了基于自由空间、停车位标记、用户交互和基础设施的停车位检测方法。目前,主流方法基于自由空间和停车位标记,因为这两种方法实现了低成本和全自动停车的目的,但同时也存在某些缺点。其中,车位的检测效率完全取决于相邻的车位的状态,当没有相邻车辆时,很容易导致系统检测故障。众所周知,基于停车位标记的方法的研究对象包括停车位标记。因此,当停车位标记严重磨损或占据时,系统也无法检测到。此外,这种检测在黑暗环境中时并不鲁棒。

【自动驾驶之心】全栈技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、多传感器融合、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、硬件配置、AI求职交流等方向;
添加汽车人助理微信邀请入群
备注:学校/公司+方向+昵称


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









