






作者 | 自动驾驶专栏 编辑 | 自动驾驶专栏
点击下方卡片,关注“自动驾驶之心”公众号
ADAS巨卷干货,即可获取
点击进入→自动驾驶之心【3D目标检测】技术交流群
后台回复【3D检测综述】获取最新基于点云/BEV/图像的3D检测综述!
本文只做学术分享,如有侵权,联系删文
论文链接:https://arxiv.org/pdf/2307.02060.pdf

摘要

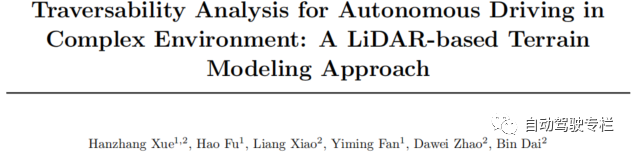
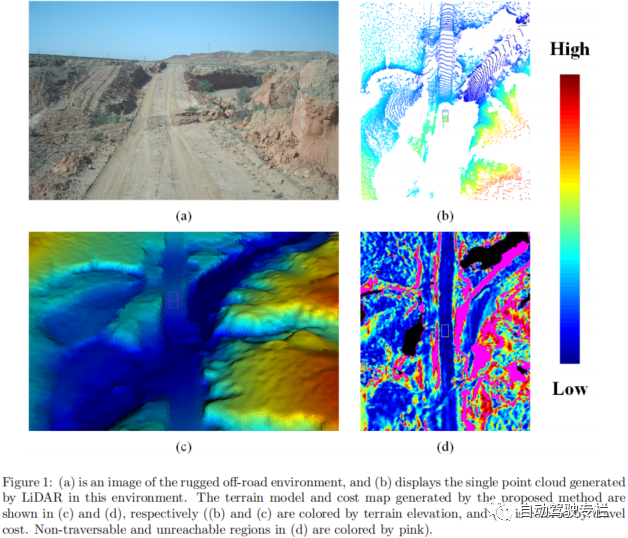
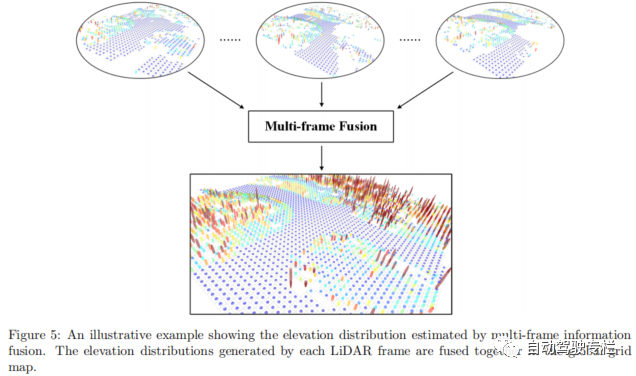
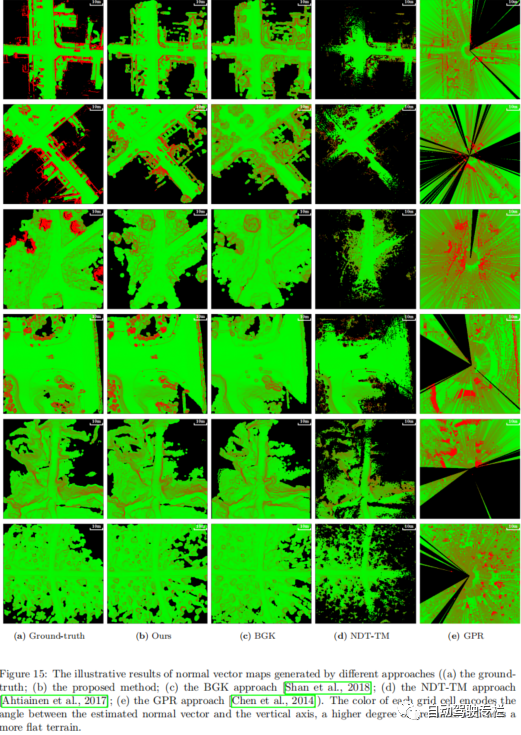
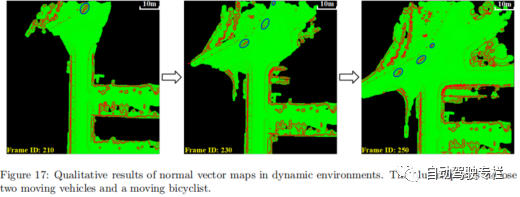
本文介绍了自动驾驶在复杂环境中的可通行分析:一种基于激光雷达的地形建模方法。对于自动驾驶而言,可通行分析是最基本和最重要的任务。在本文中,我们提出一种新型的基于激光雷达的地形建模方法,其可以输出稳定、完整和精确的地形建模以及可通行分析结果。由于地形是环境的固有属性,不会随着视角不同而发生变化,因此本文方法采用一种多帧的信息融合策略进行地形建模。具体而言,本文采用一种正态分布变换建图方法,通过融合来自连续激光雷达帧的信息来精确地建模地形。然后利用空间-时间贝叶斯广义核推断和双边滤波来提高结果的稳定性和完整性,同时保留尖锐地形的边缘。基于地形建模结果,通过对相邻地形区域之间进行几何连通性分析来获取每个区域的可通行性。实验结果表明,所提出的方法可以实时运行,并且优于最先进的方法。

主要贡献

本文的贡献总结如下:
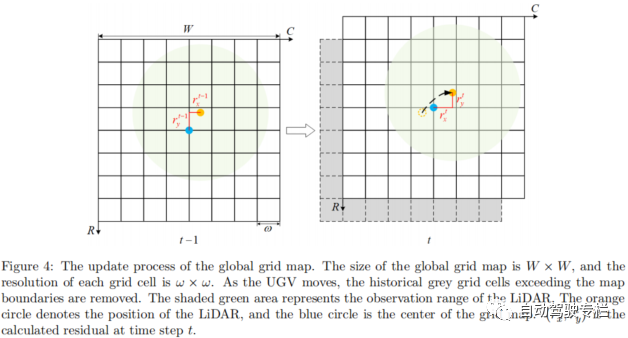
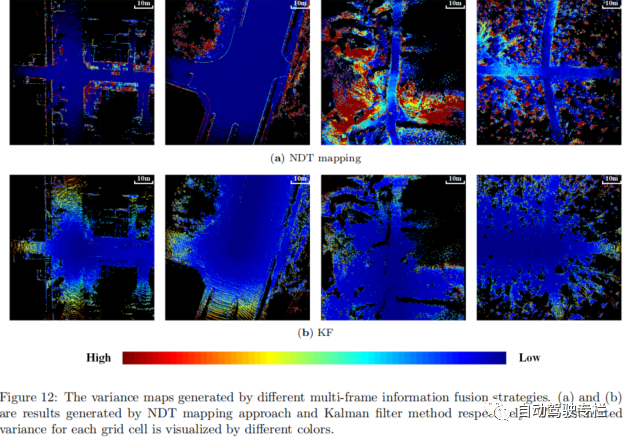
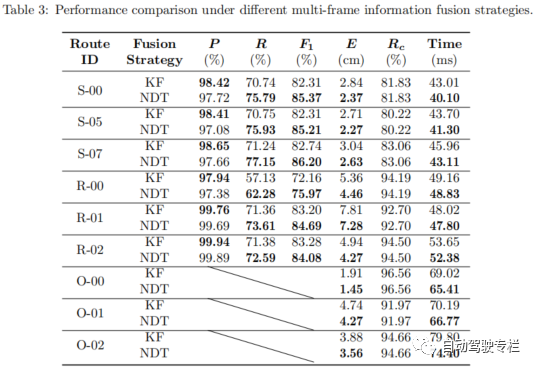
1)本文充分利用连续激光雷达帧提供的信息进行可通行分析,而不是将其作为一个单帧任务。本文采用一种NDT建图方法对地形进行建模。此外,我们还考虑了全局网格地图和局部网格地图之间的量化误差。通过采用这种多帧融合方法,可以轻易避免一些估计误差,并且估计结果更有可能稳定和完整;
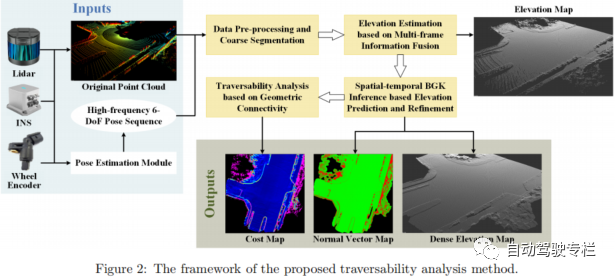
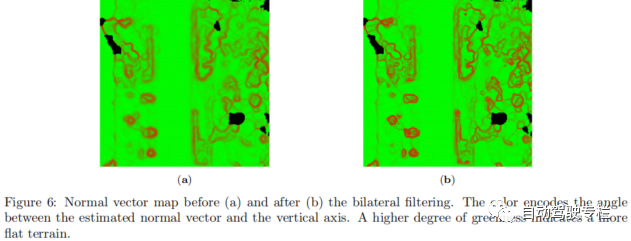
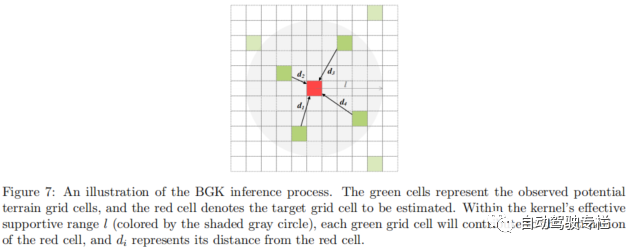
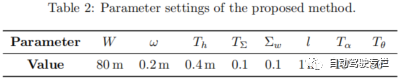
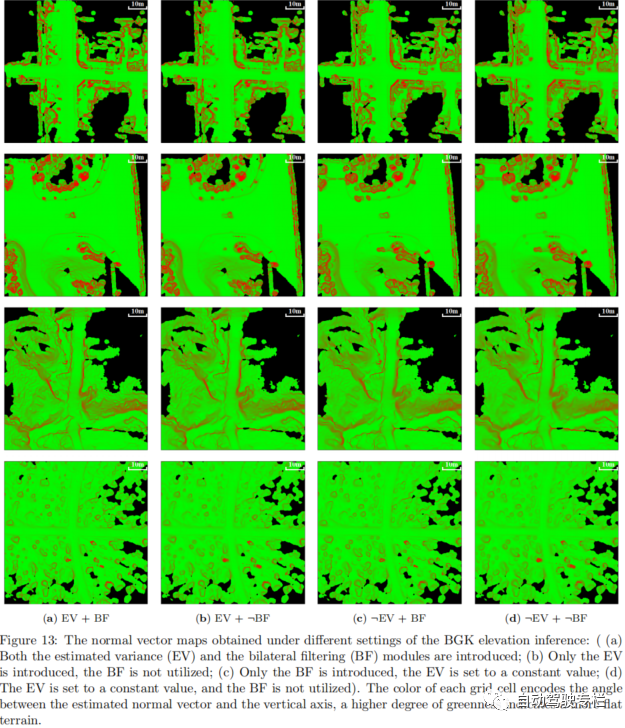
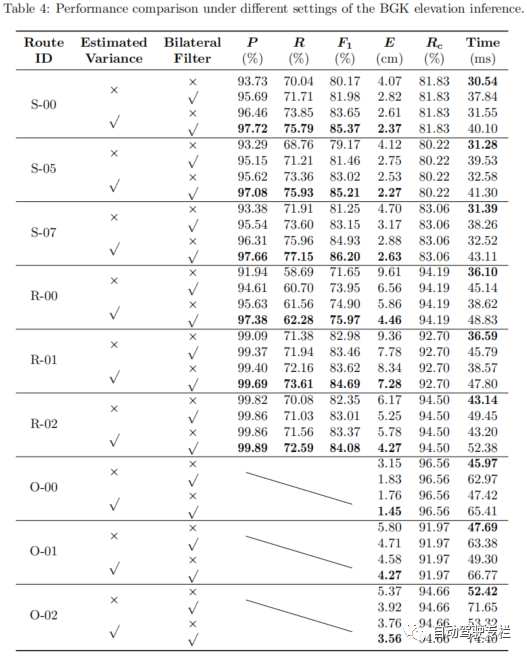
2)本文提出一种空间-时间BGK高度推断方法。与最初的BGK方法相比,我们做出了两点改进。第一点改进为,我们将双边滤波引入到BGK高度推断中,从而缓解了边缘模糊问题。第二点改进为,在BGK推断中引入由NDT建图方法估计的高度方差作为权重。在这个权重的帮助下,具有较大方差的网格单元对高度推断的贡献越少。通过应用这两点改进,估计的地形模型和可通行分析结果可以更为精确;
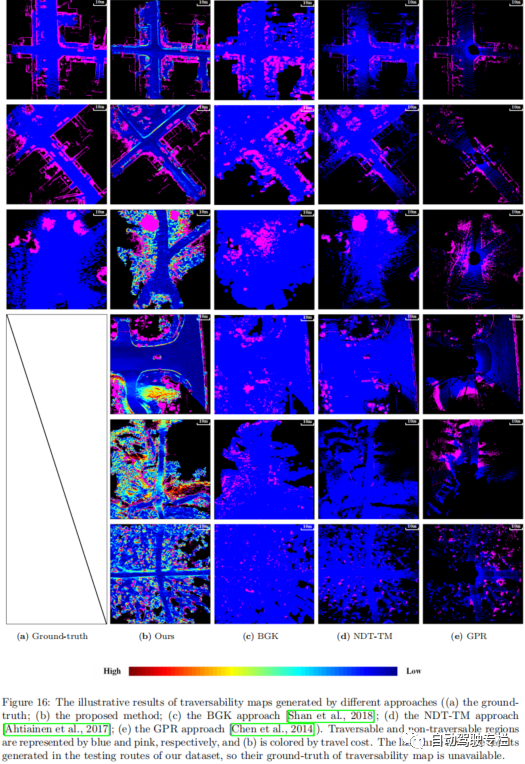
3)通过分析相邻地形单元之间的几何连通性质,我们可以获得一张代价地图。这张代价地图有助于区分不同的地形类型,例如路缘、沟渠、坡道和道路边界。因此,本文所提出的方法可以帮助UGV路径规划模块在复杂环境中选择合理且安全的路径。

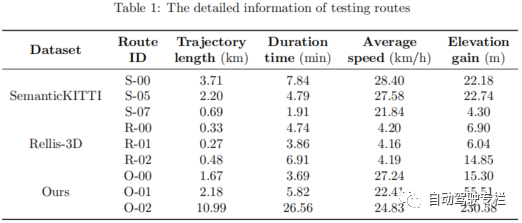
论文图片和表格




总结

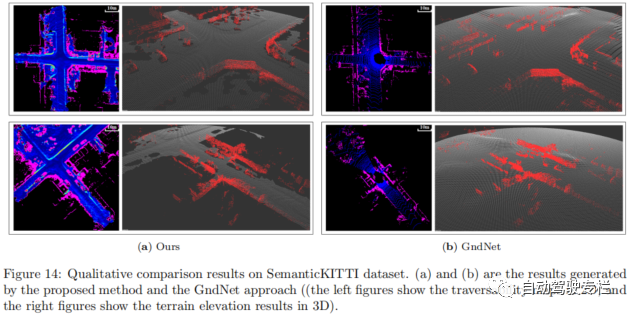
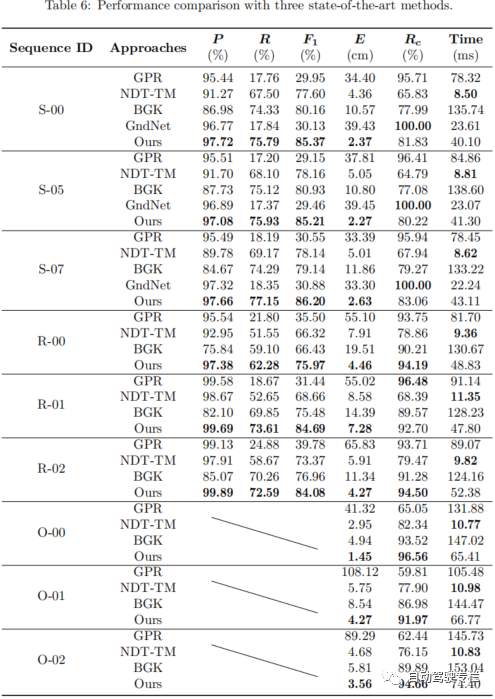
本文提出了一种新型的基于激光雷达的可通行分析方法。它可以实时生成稳定、完整且精确的地形模型以及可通行分析结果。本文通过一种NDT建图方法融合来自连续帧的信息。通过利用空间-时间贝叶斯广义核推断和双边滤波,可以有效地从相邻的观测区域推断出不可观测区域的地形高度,并且将提高生成的地形模型的完整性。然后,通过相邻地形单元之间的几何连通性分析来估计地形可通行性,并且可以区分具有不同可通行代价的地形。在公开数据集和我们自己数据集上的实验结果表明,所提出方法优于最先进的方法。
然而,所提出的方法仍然具有一些局限性。一个问题是,所提出的方法无法处理环境中存在的负面障碍物。负面障碍物在地形地图中被观测为一些空区域,并且本文方法倾向于通过BGK推断来过度平滑这些空区域。这个问题在我们今后的工作中将得以解决。此外,通过利用多分辨率框架可以进一步提高计算效率和检测结果的完整性,这也是将来的工作内容。
① 全网独家视频课程
BEV感知、毫米波雷达视觉融合、多传感器标定、多传感器融合、3D目标检测、目标跟踪、Occupancy、cuda与TensorRT模型部署、协同感知、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码免费学习)
 视频官网:www.zdjszx.com
视频官网:www.zdjszx.com
② 国内首个自动驾驶学习社区
近2000人的交流社区,涉及30+自动驾驶技术栈学习路线,想要了解更多自动驾驶感知(2D检测、分割、2D/3D车道线、BEV感知、3D目标检测、Occupancy、多传感器融合、多传感器标定、目标跟踪、光流估计)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、AI模型部署落地实战、行业动态、岗位发布,欢迎扫描下方二维码,加入自动驾驶之心知识星球,这是一个真正有干货的地方,与领域大佬交流入门、学习、工作、跳槽上的各类难题,日常分享论文+代码+视频,期待交流!
③【自动驾驶之心】技术交流群
自动驾驶之心是首个自动驾驶开发者社区,聚焦目标检测、语义分割、全景分割、实例分割、关键点检测、车道线、目标跟踪、3D目标检测、BEV感知、Occupancy、多传感器融合、大模型、SLAM、光流估计、深度估计、轨迹预测、高精地图、NeRF、规划控制、模型部署落地、自动驾驶仿真测试、产品经理、硬件配置、AI求职交流等方向。扫码添加汽车人助理微信邀请入群,备注:学校/公司+方向+昵称(快速入群方式)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









