






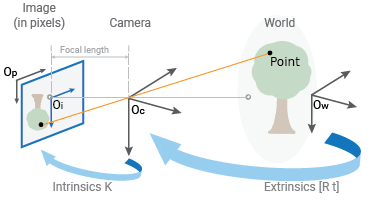
计算机视觉的核心任务之一便是将摄像头捕捉到的二维图像信息转化为三维空间中的物体几何数据,进而实现物体的重建与识别。这一过程依赖于相机成像的精确几何模型,该模型确定了物体表面点在三维空间的位置与其在图像中对应点之间的映射关系。这些构成模型基础的参数被称为相机参数。
在实际应用中,这些相机参数往往需通过精密的实验和复杂的计算来确定。无论是在自动驾驶领域还是图像测量和机器视觉,相机参数的准确标定都至关重要,其标定的准确性和算法的稳定性直接决定了相机性能的优劣及应用结果的可靠性。因此,精确的相机标定是成功进行后续处理工作的基础,其标定结果的精度及算法的稳定性直接影响相机工作产生结果的准确性。特别是自动驾驶领域,单目测距测速、多传感器融合、毫米波雷达视觉融合、激光雷达视觉融合特别依赖相机标定的精度。
标定课程早鸟8.8折优惠
微信扫码领取
传感器标定方向待遇如何?
下面是一张从某招聘网站获得的最新岗位信息(传感器标定算法开发)截图,可以很清楚的看到企业对标定这个岗位的要求。多条要求中都涉及到了相机标定,因为相机作为智能驾驶或机器人领域中不可或缺的传感器,是几乎所有智驾方案及机器人视觉方案都会使用的,所以熟练掌握相机标定的原理和开发优化策略是任职的关键。

相机标定的难点在哪里?
需要注意的是,每一台相机都有其独特的内参,它们是由相机的设计和制造决定的固有属性。因此,在使用相机进行高精度的测量、摄影或者机器视觉应用之前,需要通过标定过程来确定这些内参,以便能够正确地将三维世界中的点投影到二维图像平面上,或者从二维图像中恢复出三维信息。
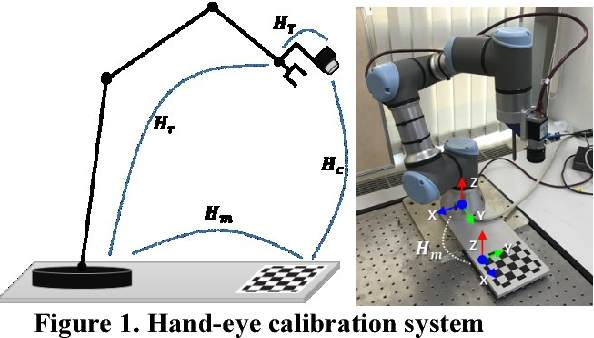
相机内参 是描述相机的光学特性和图像传感器与成像系统几何关系的参数集合, 包括焦距、畸变系数等。在自动驾驶领域,不仅需要精确标定这些内部参数,还需确立相机与汽车本体间的相对位置关系,即相机外参 的标定。自动驾驶车辆的安全运行密切依赖于感知系统提供准确信息的能力。作为感知过程中的关键一环,相机标定是实现传感器数据在统一的时空坐标系中融合的基础步骤,对于后续的数据处理和传感器融合极为关键。
量产级的项目丰富简历,解决工程问题
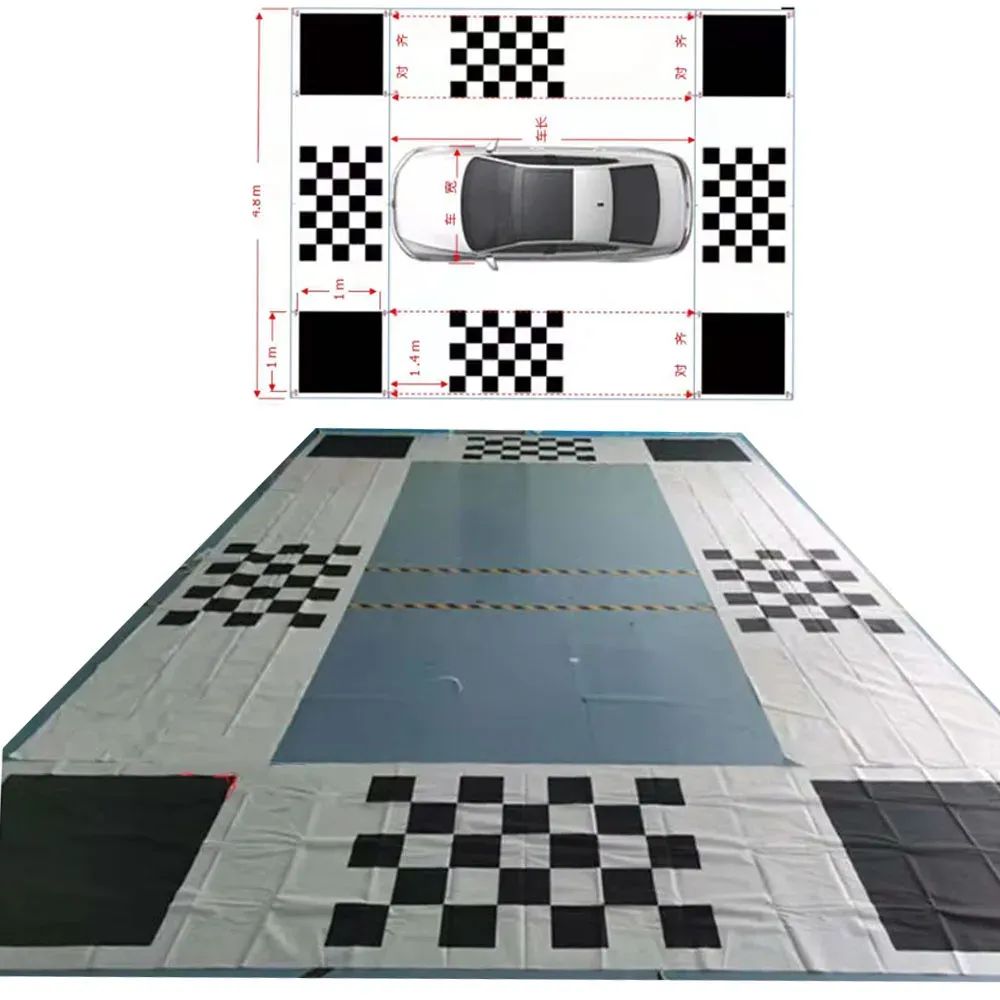
自动驾驶之心在深入调研相机标定相关内容后,针对常见的工程和量产问题,开发了一套详细的课程。本课程将深入浅出地讲解相机成像的基本原理,并详尽阐释相机内参标定的流程。课程内容覆盖了多种相机模型内参的标定原理,并对相关的计算机视觉算法进行了透彻讲解。同时,对于标定用到的各种标定板的识别技术进行详细的讲解。课程以自动驾驶场景为例来讲解相机内参和相机到车体外参的标定,包括在线标定与产线标定。同时,分析标定过程中可能遇到的常见问题,并讨论如何提升标定精度。经过我们的项目实训后,是可以实实在在写入简历中的项目,对于自动驾驶实车量产中遇到的问题都有涉及,精选大纲如下:

主讲老师
路飞,自动驾驶之心前沿技术研究团队成员,国内首个面向自动驾驶多传感器标定课程讲师。
曾在头部自动驾驶公司工作多年,有多年的自动驾驶算法研发和项目交付经验。在IROS,ICRA,RA-L,SIGGRAPH,TVCG等机器人、计算机图形学领域发表多篇论文,在自动驾驶传感器标定、SLAM、模型优化方面有着丰富的研究和项目交付经验。
适合人群
自动驾驶、计算机视觉、机器人、AR/VR相关研究方向的本科/硕士/博士;
自动驾驶、计算机视觉、机器人、AR/VR相关方向算法工程人员;
想要转入自动驾驶、计算机视觉、机器人、AR/VR方向,并希望能够深入相机标定算法的小伙伴;
本课程需要具备的基础
具有一定的C++或python基础,熟悉深度学习常用的一些基础算法;
对自动驾驶中的相机传感器的应用有一定了解;
一定的高等数学、线性代数、矩阵理论基础;
学后收获
对相机标定所有主流方案的原理有着深入理解,在产线、离线、在线标定中精度能达到量产级别;
学习到自动驾驶相机标定的算法,从根本上学会如何进行手动和自动标定;
能够精通常用相机标定算法,理论实践并重,无论是学术界抑或工业界都能直接复用;
学完本课程能够达到2年左右的相机标定工程师水平;
能够结识许多行业从业人员与学习合作伙伴;
拥有实战项目和解决实际问题的能力,可直接写入简历,且含金量高。
开课时间
2024年4月15号正式开课,加入我们一起学习,开课后2个月结课,离线教学,微信群内答疑(交流环境非常好,非常重要的部分)!购买后3天内,支持退款。
课程咨询
1)早鸟优惠扫码学习
2)添加小助理咨询更多
版权声明
自动驾驶之心所有课程最终版权均归自动驾驶之心团队及旗下公司所属,我们强烈谴责非法盗录行为,对违法行为将第一时间寄出律师函。也欢迎同学们监督举报,对热心监督举报的同学,我们将予以重报!
投诉微信:AIDriver004(备注:盗版举报)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









