






作者 | 一凡 编辑 | 智能车参考
点击下方卡片,关注“自动驾驶之心”公众号
戳我-> 领取自动驾驶近15个方向学习路线
本文只做学术分享,如有侵权,联系删文
“第一批聪明的人,已经堵在路上。”
年关将至,这样的话题登顶热搜。其中是不是包括了屏幕面前的你 ?
?

但也有车主感慨,幸好有智驾:
AI上车的便利和威力,正在越来越显性——
不管是长途跋涉,还是短途通勤,不知疲倦的AI司机正在帮车主解乏,并且基于先进成果,不断进化。
从早年的CNN,到后来的Transformer负责感知,再到当下的端到端结合VLM统揽全局,AI不断改善出行体验。
但智驾技术和体验的变革,可能还不是终点,或者正在迎来更大的机遇,甚至会改写竞速规则。
因为就在岁末年初,一种全新的技术范式正在开启落地,头部玩家有了爆款证明,引领行业跟进对齐,隐隐成为共识趋势……这种技术范式,就是——
VLA。
今年要上车的VLA,到底是什么?
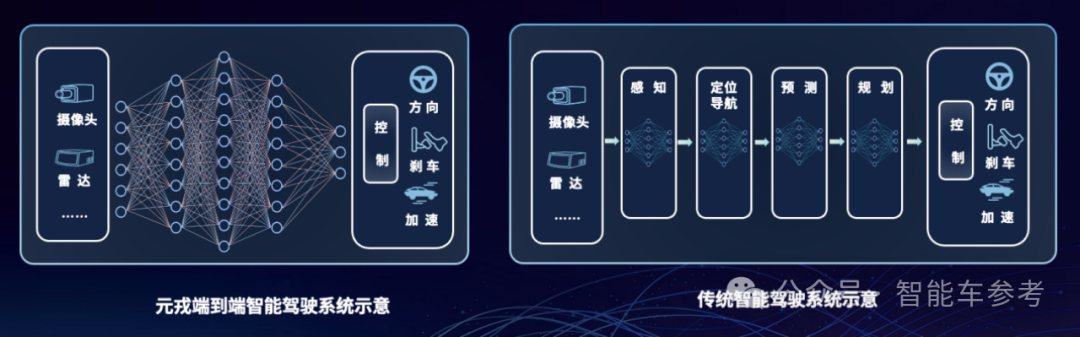
所谓“VLA”,就是视觉语言动作模型(Vision-Language-Action Model)。
最早由DeepMind于2023年提出,应用在机器人领域,输入给定的文本和视觉数据,输出机器人可执行的动作,天然便带有AI与物理世界交互的基因。
近期受到自动驾驶领域的热捧,被部分玩家视为端到端的下一个阶段。
2025年,也被称为“VLA上车元年”。
VLA,听上去和现有的VLM(视觉语言模型Vision-Language Model)有点像。
二者有什么区别吗?
从整体框架上,可将VLA模型视为VLM与端到端模型的合体,多模态大模型不再只是偶尔提个醒,“监督你开车”。
而是超绝AI老司机亲自上阵,长期在线,直接“替你开车”。

具体到能力上,VLA模型的泛化性将进一步增强,而且智驾系统全程可求导,可向用户展现系统推理过程,解释自己为什么这么开,让用户更信任智驾。
为什么VLA能有这样的进步?
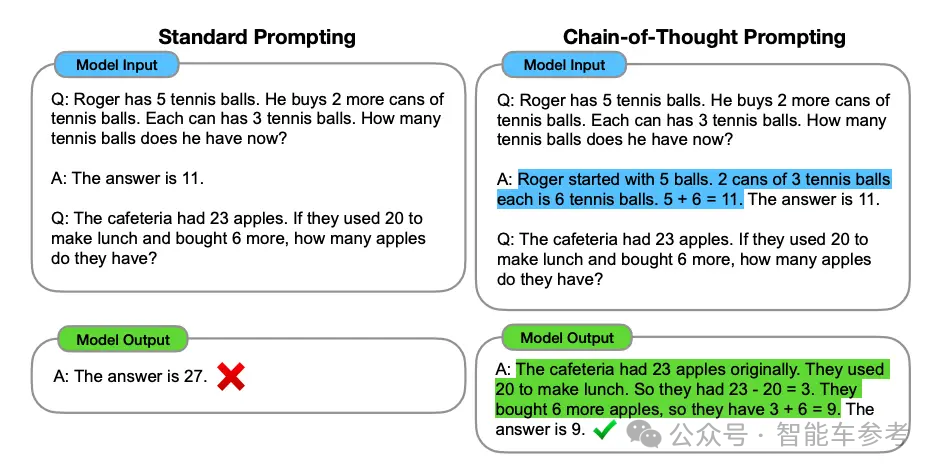
关键要素是,VLA引入了思维链,具备了“类人”的思维,让模型通过全局上下文(Global Context),能了解多重路况信息,在和其他车辆不断博弈中,做出安全的最优解。
具体来看,据率先推进VLA落地的元戎启行透露,VLM大概只能推理出未来7秒钟左右的路况,VLA却能推理出几十秒,能更好地理解一些复杂情况,比如施工现场、潮汐车道、交通指挥手势等等。
所以,VLA还是对端到端范式的进一步应用,意味着端到端来到了新的阶段。
在此前,行业还处于对端到端的探索期,证明了新范式可行。
现在,随着行业对端到端的理解更深刻,进入到端到端的竞速期,衍生出对端到端的不同路线思考。
VLA是其中的热门方向。
不仅在国内受到头部主机厂理想和头部供应商元戎启行的双双认可,率先热推。
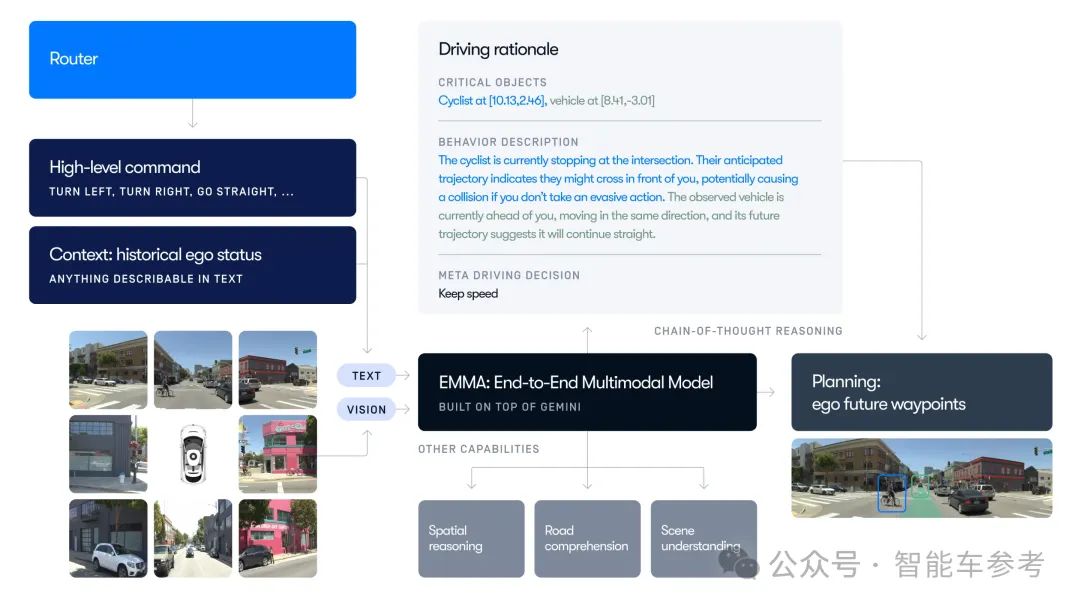
在海外,Waymo不久前基于Gemini打造的EMMA,也被从业者视为VLA。
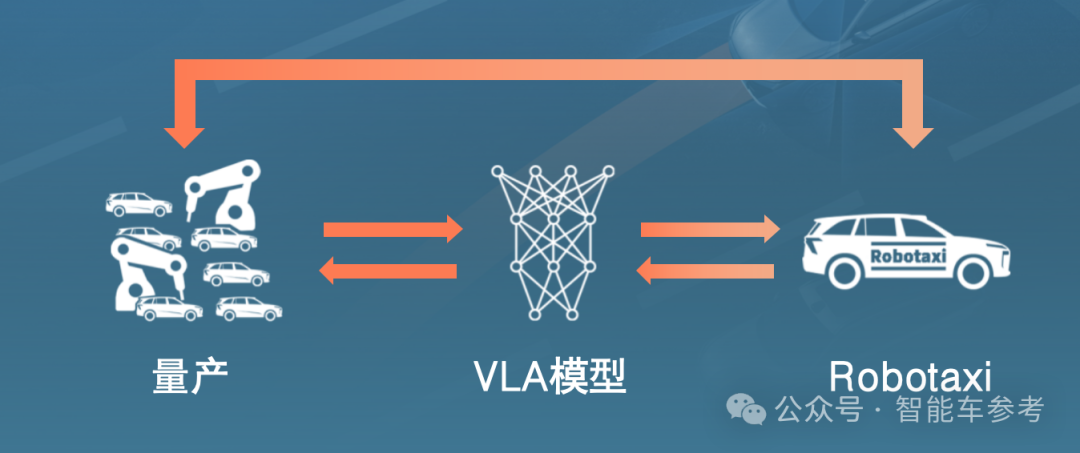
国内,代表性玩家正是以AI技术性著称的智驾黑马元戎启行,据其透露的落地规划显示,已和头部车企达成量产合作,将在今年基于英伟达Thor,推出搭载VLA模型的智能车。
因此,站在2025年的起点上,展望新一轮智驾角逐,VLA已成为争夺智驾第一梯队的理论基础之一。
但理论基础,还不是全部。
智能驾驶的“爆款思维”
什么样的玩家能够在智能驾驶竞赛中领先?行业正在出现的共识,主要有以下两个方面:
首先,是要有领先的技术范式支撑。
这已经在2024年验证过了。
比如在ADS 3.0转向端到端的华为,利用“VLM+E2E”迎头赶上的理想,以及提出“不是真无图,谈何端到端”的元戎启行。
然后,还要有将技术落地的实力证明,即能不能打造爆款。
证明实力,为什么要看爆款?
爆款,意味着车型热销。

对主机厂来说,没有爆款车型,等于在智驾层面掉队。
毕竟,车子卖不好就没有数据,没有数据就做不好智驾,等于在智能化竞争中落后了。
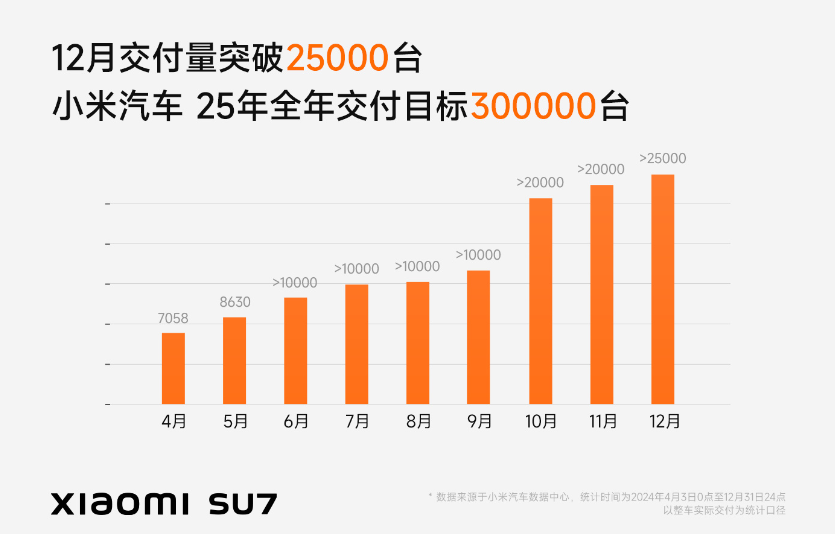
2024年,最成功的例子就是小米汽车。
小米SU7销量迅速突破10万级,为小米提供了数据基础,然后自研智驾快速追赶。
当然,也有很多从业者认为,不是所有的主机厂,都需要自研,也可以选择智驾供应商。
但殊途同归,对供应商来说,与主机厂合作打造爆款也很重要。

据了解,定点的多少,实际上和技术进步没有必然联系。
定点多,只代表着算法上车的车型多,并不一定意味着销量大。
车辆成为爆款,在技术上加速供应商算法迭代。
在商业化上,不仅让主机厂受益,更能证明供应商实力,获取更多定点。
所以说,打造爆款就是求质,求质本身就是在求量。
这在2024年已经得到了印证。
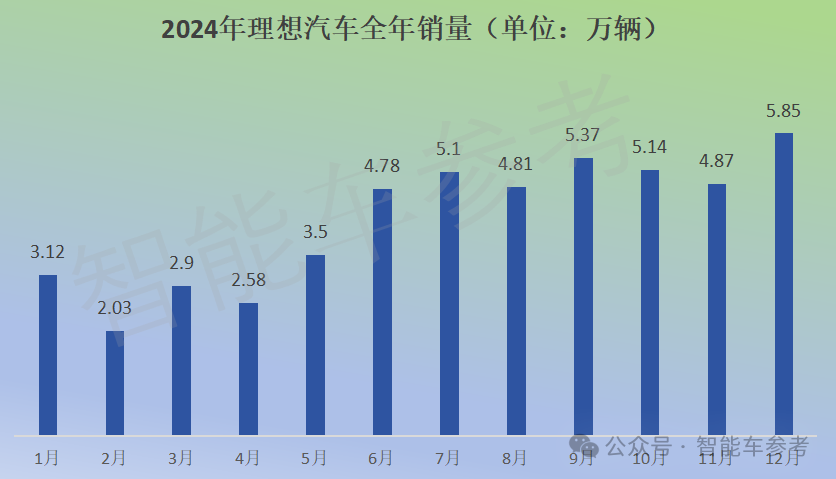
比如主机厂中的理想汽车,2024年销量突破了50万辆,特别是在下半年智驾突飞猛进后,月均销量突破5万台,站上新台阶。用爆款奶爸车,领跑新势力。
小米汽车则通过一款SU7,上市不到10个月交付13.5万台,快速积累起数据,半年多的时间,从城区NOA迈向「全国都能开」,近期又推送了端到端先锋版。
供应商也有两家打造爆款,在2024年引起行业关注。
一家是华为,用智能化赋能问界大卖。
其中问界M7在2024年交付超19万台,问界M9同期交付超15万台,重塑了豪华新格局。
另一家正是元戎启行,助推魏牌蓝山上市后销量节节攀高,用4个月的时间,迅速在细分市场获取10%的市场份额。
有意思的是,智驾行业和2022年的AI行业非常相似,上一轮技术浪潮塑造的格局尚未稳定,新一轮技术浪潮的冲击又在极短时间内证明了颠覆性变革的潜力。
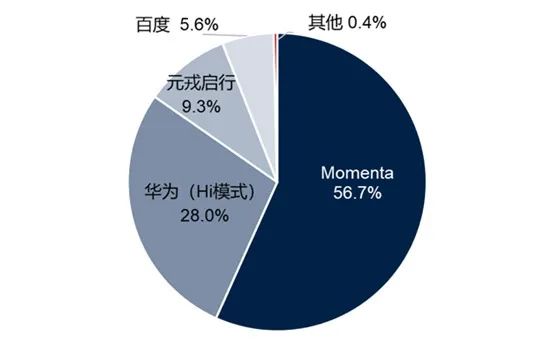
△数据来源:企业调研、上险量数据,车百智库研究院整理
在AI领域,一度“边缘”的黑马OpenAI靠着生成式AI,绑定巨头微软,实现了AI游戏规则和格局的剧变;在智驾领域,同样作为技术黑马的元戎启行,借助端到端、VLA,与长城、吉利等巨头合作,用效果和爆款速度,宣示全新的浪潮。
生成式AI变革之前,AI已经在感知领域实现了高成熟度渗透;而当前智驾市场,VLA变革前夜,高阶智驾也攻入了城区,距离完整的端到端体验,只差质变一脚。
这种质变,VLA技术为引擎,爆款车型带来的数据为飞轮,然后在Scaling Law作用下滚动雪球。
这不是趋势和预测,这是对已经发生的事实和现象的总结。
城区NOA爆发前夜,用爆款跑出加速度
经过两年时间的快速发展,城区NOA已来到了爆发前夜。

2023年被称为城区NOA上车元年,行业拼命卷“开城”。
虽然当时已经有玩家开始路测端到端,但大多数玩家的智驾算法,还依赖先验信息,尚未摆脱高精地图。
再加上用户对智驾尚不感冒,最后据统计城区NOA在当年渗透率还不到1%。
到了2024年,行业逐渐摆脱高精地图依赖,一夜解锁「全国都能开」,并向「车位到车位」演化。
智能驾驶开始占领用户心智,高阶智驾成为智能车核心卖点,到店试“驾”,既是试车也是试智驾产品。
这一年,城区NOA加速上车,但从全年来看,渗透率仍然是个位数,城区NOA至少拥有数百万量级的增长空间。
因为城区NOA搭载的车型售价,往往在20万元以上,这一价格区间的车型在乘用车市场占比大约为20%。
而根据中汽协数据,2024年全国乘用车销量为2756.3万辆,假设20万元以上车型的智驾选装率为80%,简单计算一下可知,未来每年搭载城区NOA的新车数量为366万辆,是当前的数倍之多。
所以,城区NOA市场份额的争夺,才刚刚开始。
什么样的玩家能够脱颖而出?
底层逻辑不外乎技术的领先和落地体验领先。
回顾城区NOA的发展历程,从「开城」到「全国都能开」,再到「车位到车位」,用户体验不断优化,背后是去高精地图转向无图NOA,再到端到端技术范式的转变。
所以乾坤未定,但黑马并不多,利用新范式快速崛起,2024年最受瞩目的有两匹。
一家是主机厂中的理想,去年10月23日官宣“端到端+VLM”全量推送,一方面,智驾系统能力更强,应对环岛通行、U型掉头、拥堵路况和复杂路口等情况,决策更果断,智驾更拟人。
另一方面,系统解释性能力也更强,VLM可将感知到的画面投到车机上,配合文本和图像,讲解模型驾驶背后的思考。
在2024年12月底的AI Talk上,理想透露,下一步还要用VLA做智能驾驶。

另一匹黑马则是元戎,在过去多次提前押中技术路线:
2020年,启动去高精地图的方案,2023年不随大流卷“开城”,率先落地“无图”NOA。
后来基于“无图”方案,元戎在2023年8月完成了端到端架构下的道路测试。
端到端正式量产上车后,元戎启行在2024年11月初也提出要用VLA作为下一阶段智驾底座。
智驾玩家们正通过打造爆款,为算法迭代收获加速度,更快接近终局。
智驾算法不断迭代,用户体验随之不断增强。目前最领先的功能体验,毫无疑问,当属「车位到车位」。
理想率先全量推送,华为系陆续上车,雷军更是亲自上阵,CEO直测。
一众供应商也在快速跟进,比如元戎启行,今年一季度也要推出「车位到车位」。
2025年,全新的VLA技术范式,全新的「车位到车位」体验,也预示着城区NOA的赛道不会像过年回家的路那样拥堵。
因为VLA的技术门槛依然存在,就像OpenAI宣示大模型作用后,模仿者和复刻者一个接一个,但最后都只能跟随,难以超越。真正有技术洞察的玩家,率先享受认知红利。
所以带来的结果也不难推测,刚刚初见雏形的智驾1.0格局,只是上半场结束的短暂休息,决定终局的下半场——智驾2.0竞速已经开始。
谁会是VLA浪潮下最后的智驾最大赢家?
① 2025中国国际新能源技术展会
自动驾驶之心联合主办中国国际新能源汽车技术、零部件及服务展会。展会将于2025年2月21日至24日在北京新国展二期举行,展览面积达到2万平方米,预计吸引来自世界各地的400多家参展商和2万名专业观众。作为新能源汽车领域的专业展,它将全面展示新能源汽车行业的最新成果和发展趋势,同期围绕个各关键板块举办论坛,欢迎报名参加。

② 国内首个自动驾驶学习社区
『自动驾驶之心知识星球』近4000人的交流社区,已得到大多数自动驾驶公司的认可!涉及30+自动驾驶技术栈学习路线,从0到一带你入门自动驾驶感知(端到端自动驾驶、世界模型、仿真闭环、2D/3D检测、语义分割、车道线、BEV感知、Occupancy、多传感器融合、多传感器标定、目标跟踪)、自动驾驶定位建图(SLAM、高精地图、局部在线地图)、自动驾驶规划控制/轨迹预测等领域技术方案、大模型,更有行业动态和岗位发布!欢迎扫描加入

③全网独家视频课程
端到端自动驾驶、仿真测试、自动驾驶C++、BEV感知、BEV模型部署、BEV目标跟踪、毫米波雷达视觉融合、多传感器标定、多传感器融合、多模态3D目标检测、车道线检测、轨迹预测、在线高精地图、世界模型、点云3D目标检测、目标跟踪、Occupancy、CUDA与TensorRT模型部署、大模型与自动驾驶、NeRF、语义分割、自动驾驶仿真、传感器部署、决策规划、轨迹预测等多个方向学习视频(扫码即可学习)

④【自动驾驶之心】全平台矩阵


















 746
746

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









