






蓝桥杯外设配置
一、新建工程
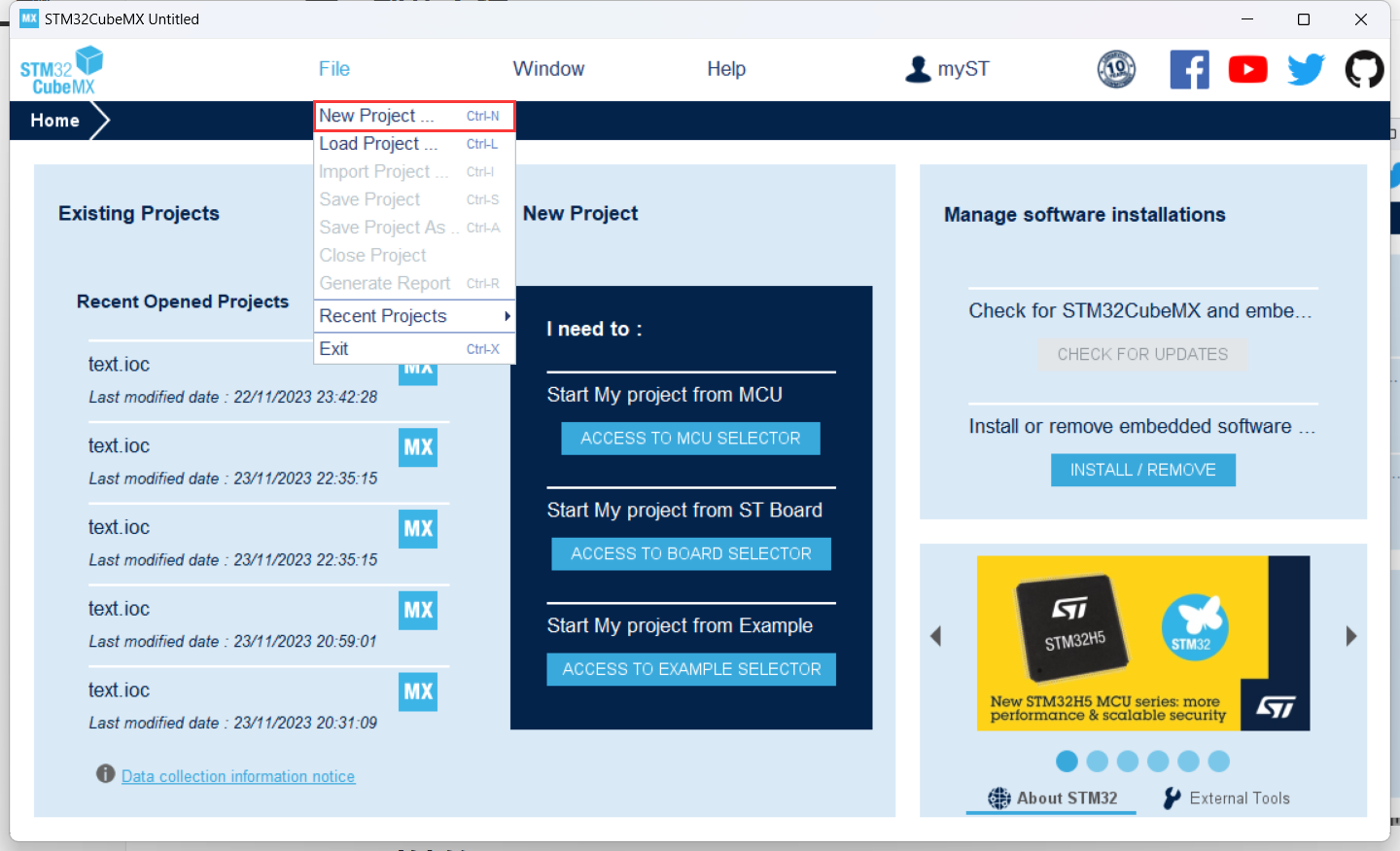
选择File->new project
由资源配置表可以看到MCU的型号是STM32G431RBT6
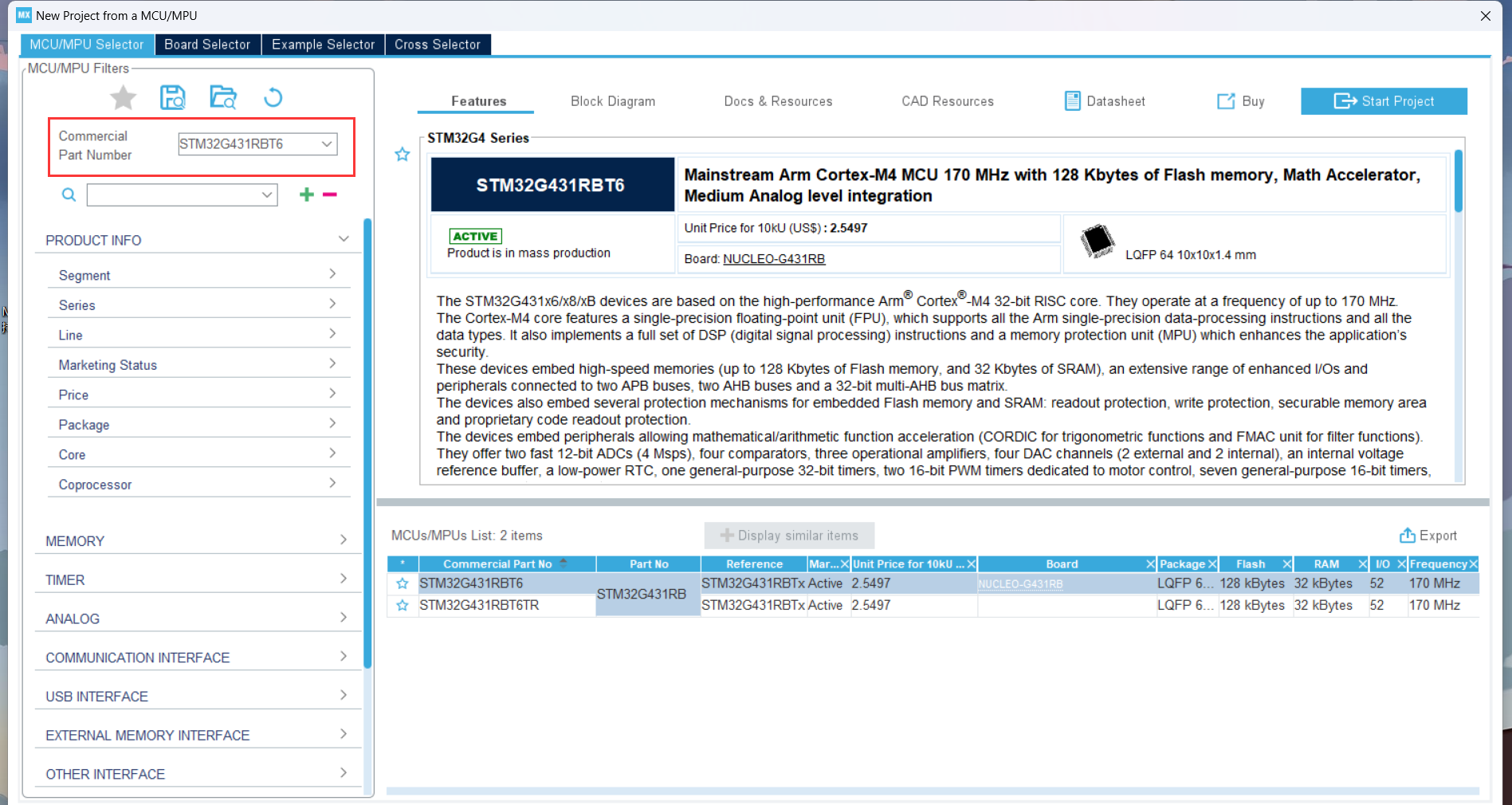
在Commercial Part Number 中输入STM32G431RBT6。
选择第一个就行

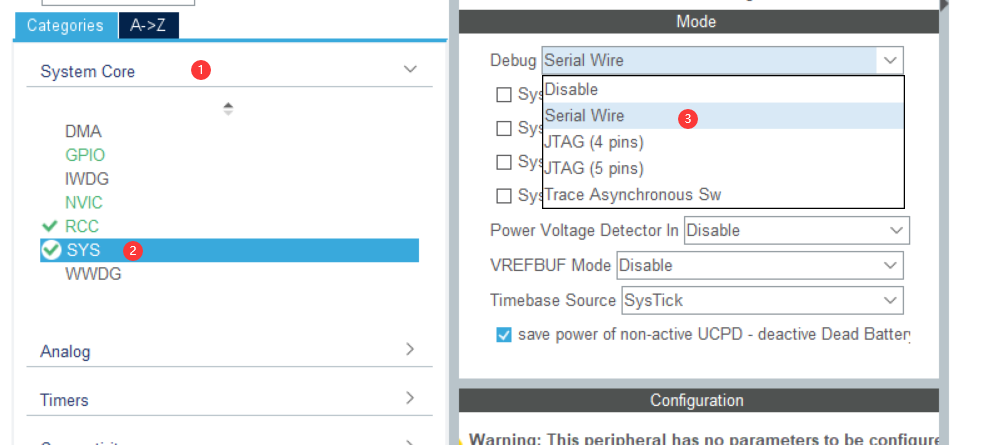
下载方式改为通过串行线
配置工程
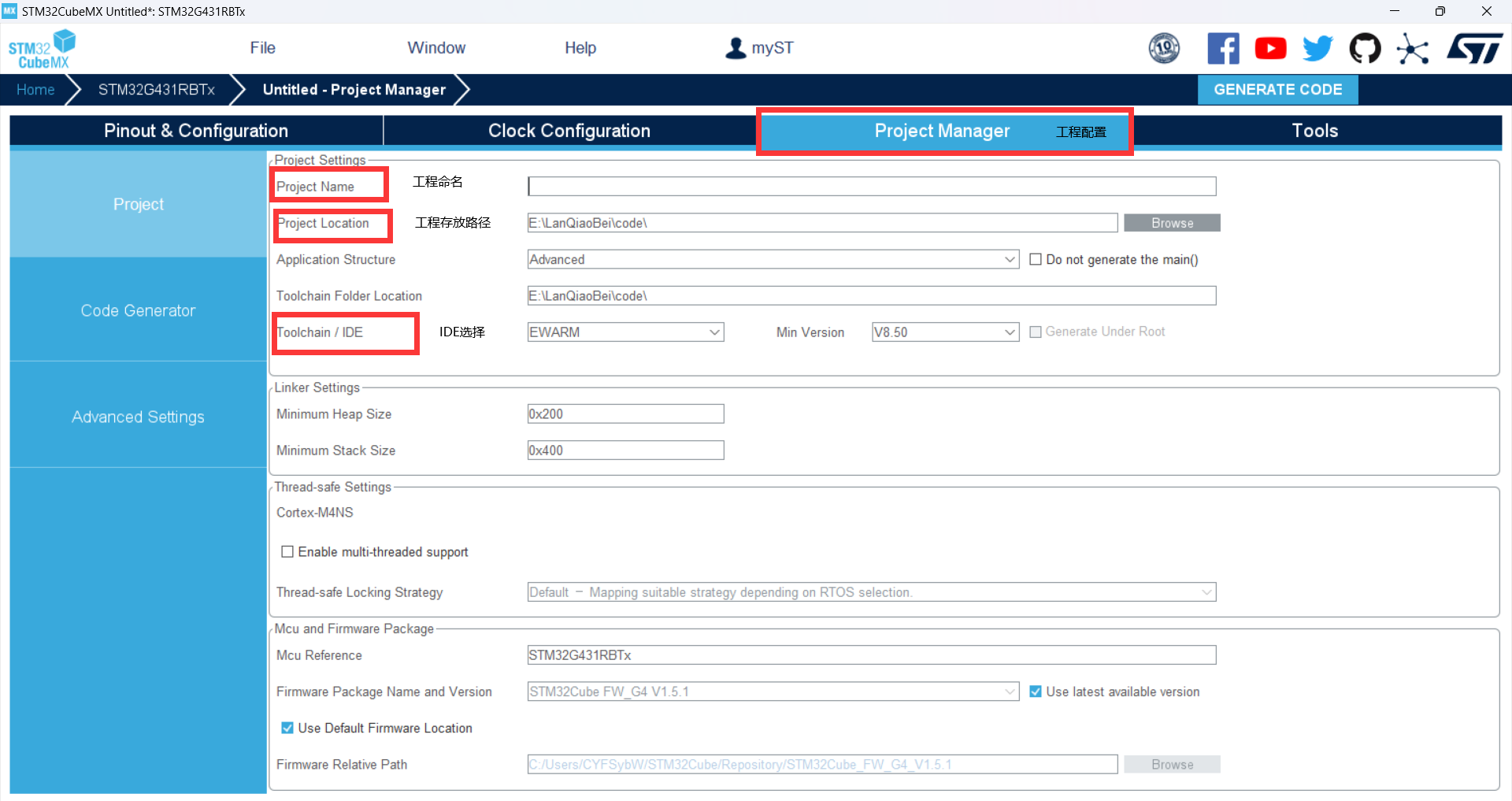
注意:工程的命名以及存放路径必须是英文不然会导致cubemx导出失败。
至于IDE的选择,因为我用的是keil所以这里选择MDK-ARM

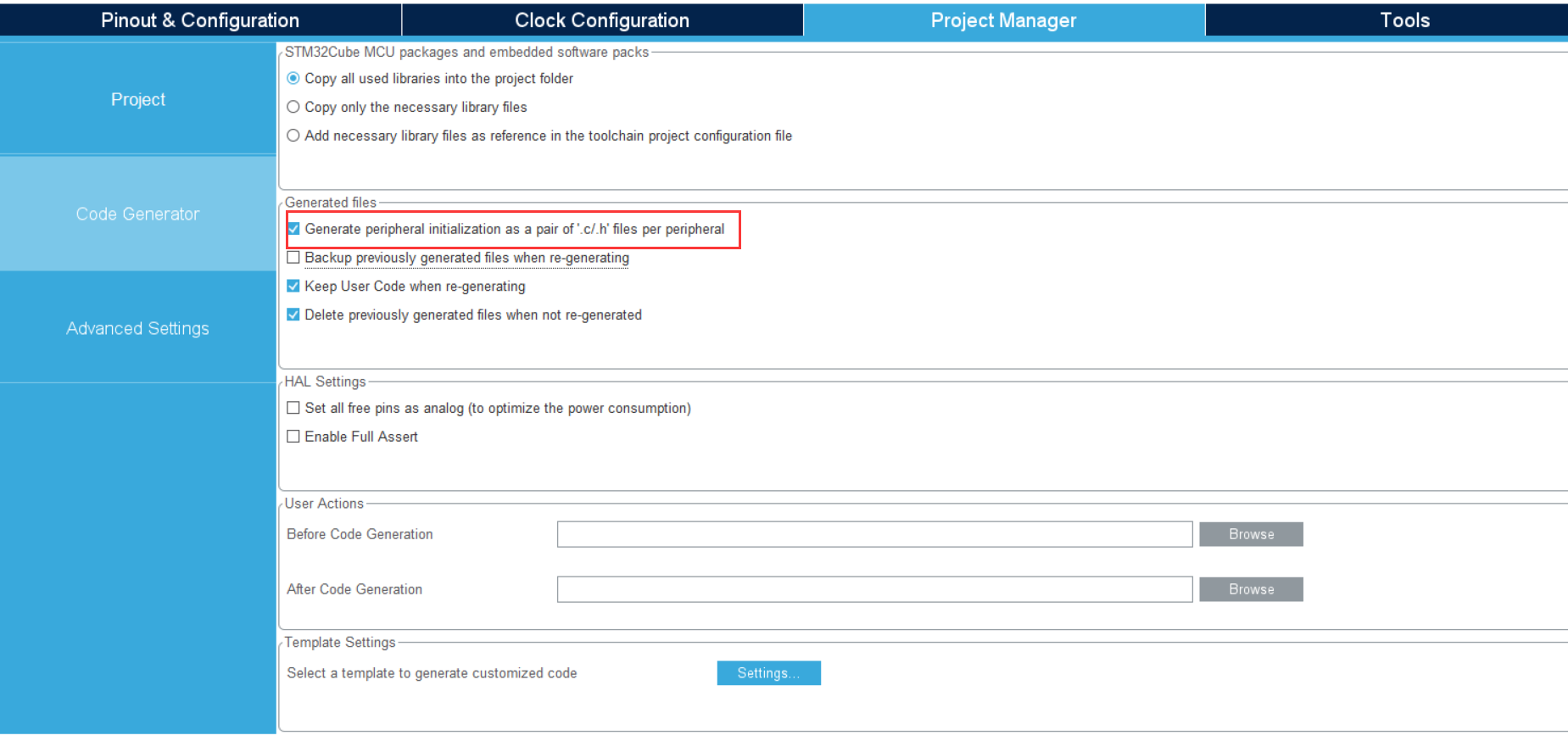
至于生成的代码配置,只需要把为每一个外设生产.c.h,其他默认不变。
打开所生成的文件。
我们可以新建一个文件夹Bsp(板载支持),用于存放我们自己的模块代码。
二、时钟的配置
设置外部的高速时钟
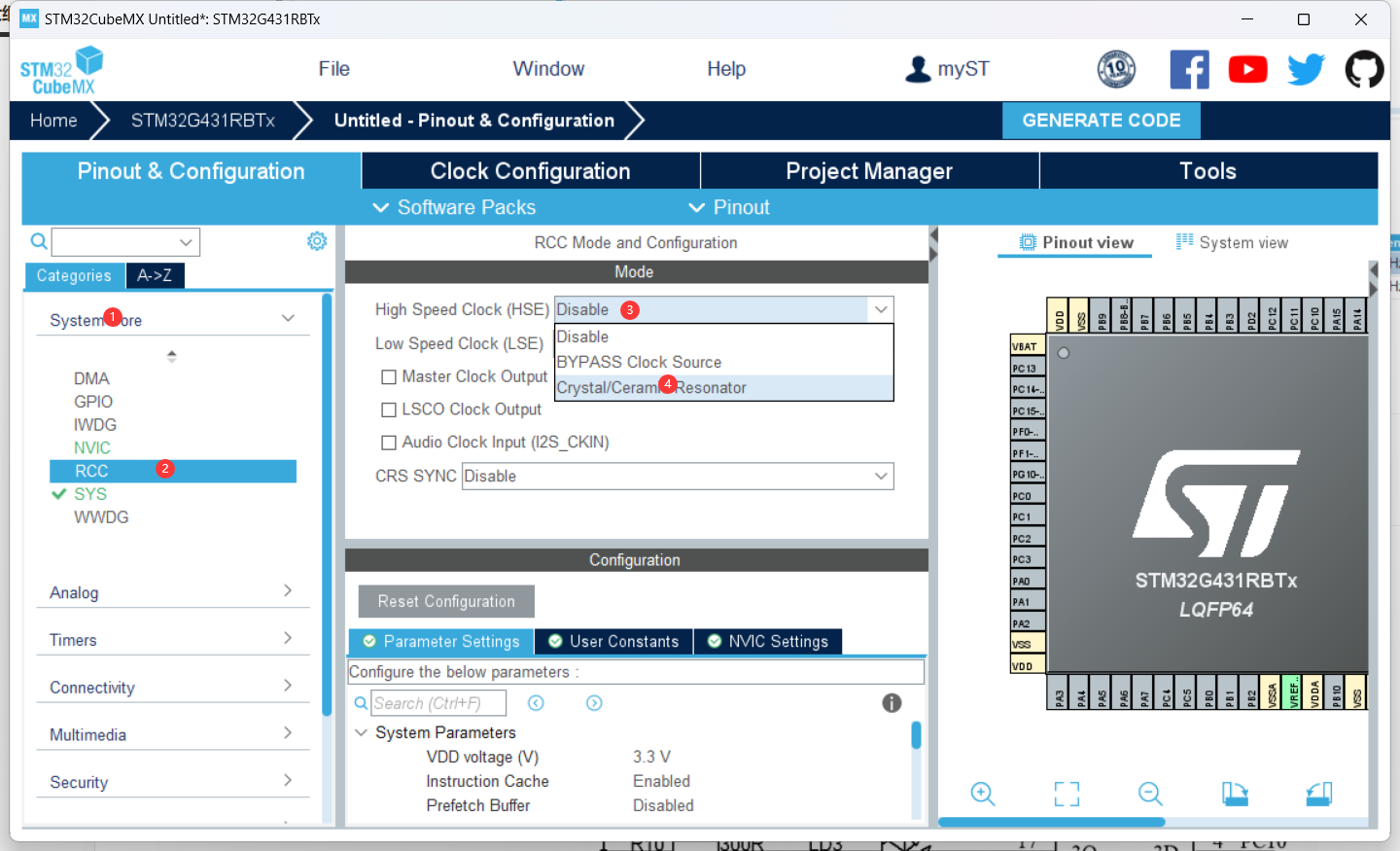
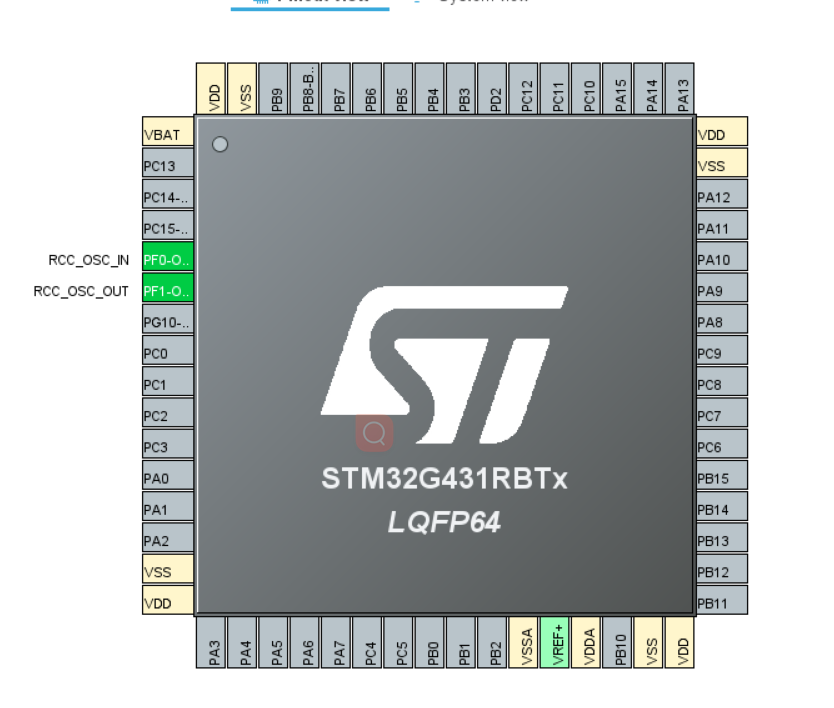
此时可以看到PF0和PF1已经作为外部晶振的输入口
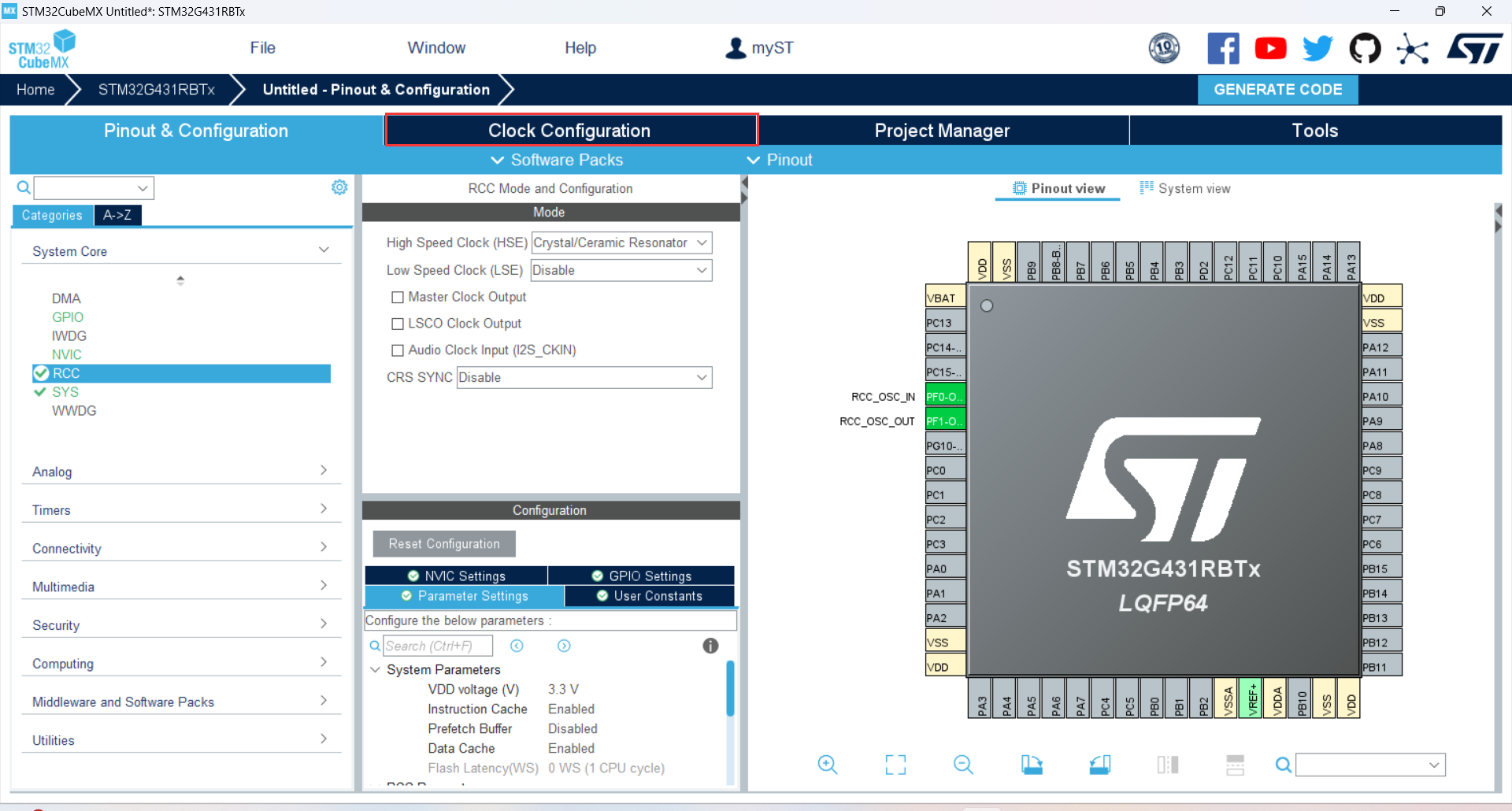
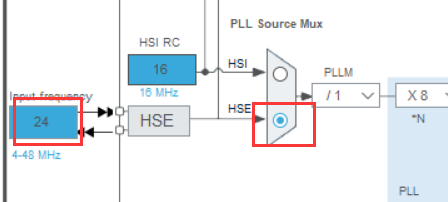
接下去还需要配置时钟总线
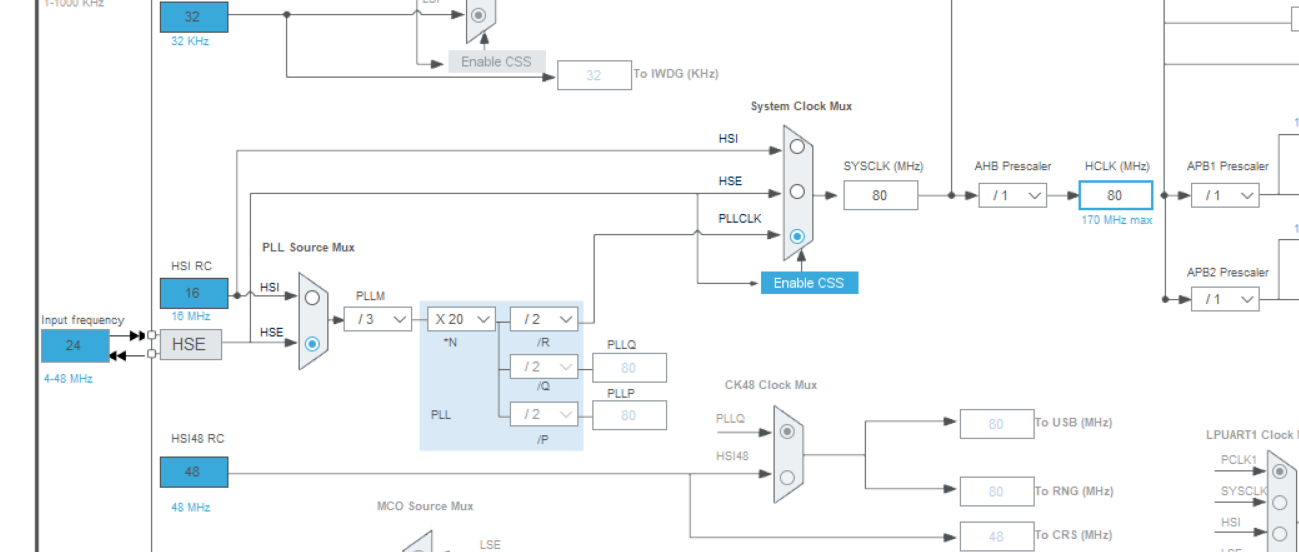
通过产品手册我们可以发现,板载的外部时钟为24MHZ
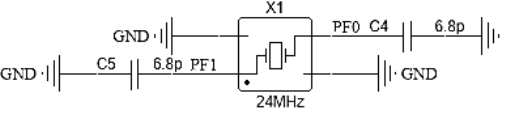
所以我们要不外部时钟改为24MHZ,并且把时钟源改为外部时钟。
把System Clock Mux改为PLLCLK
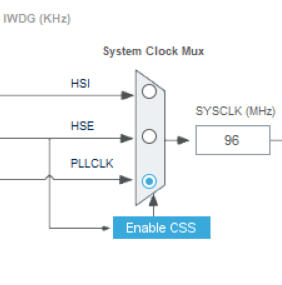
在把AHB总线的时钟频率配置成80MHZ然后回车就行

基本的配置都已经好了,这时候我们只需要点击生成代码就行。
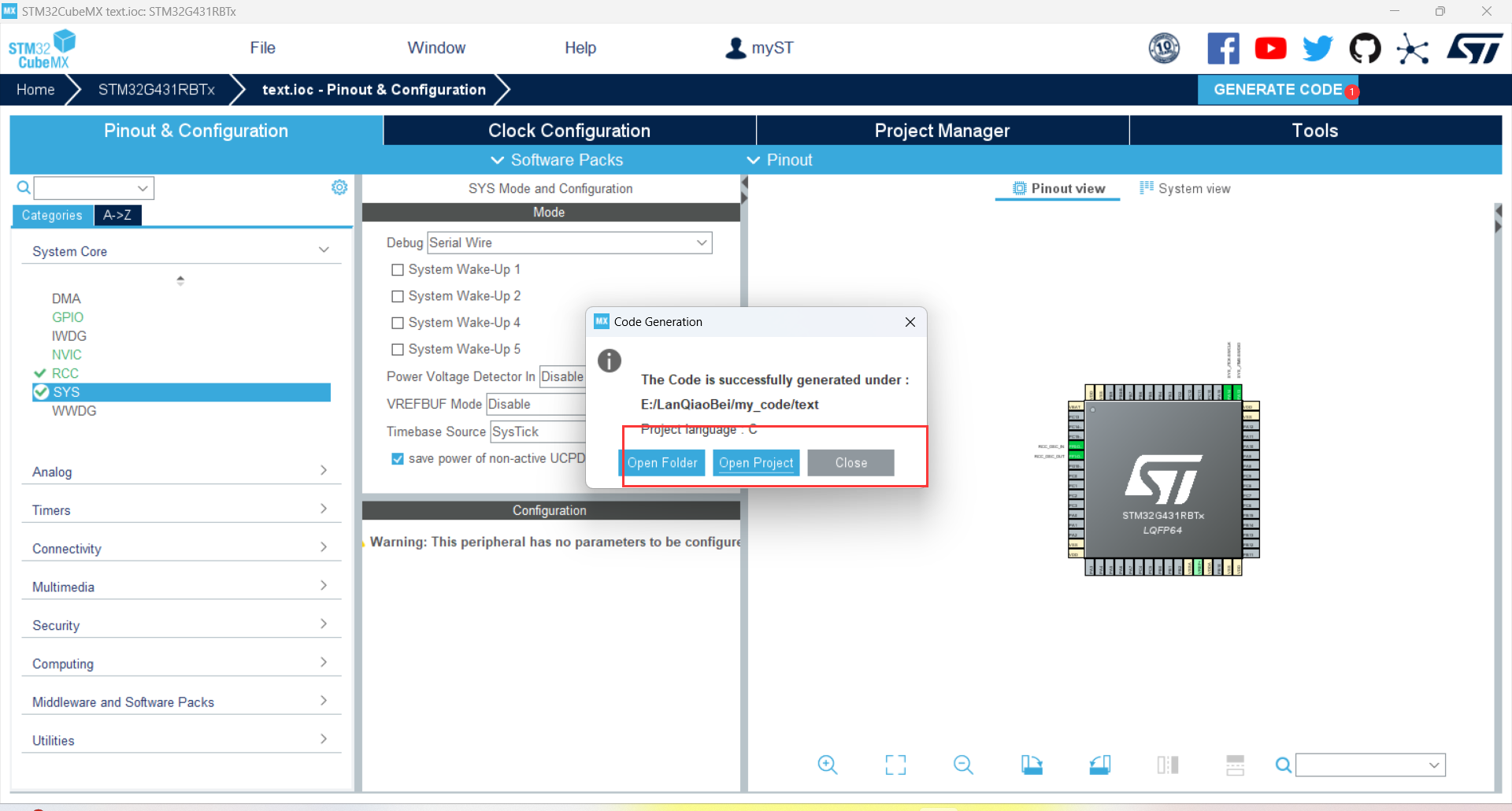
打开工程文件这时候就可以看到,cubemx已经自动帮我们生成了一下文件。
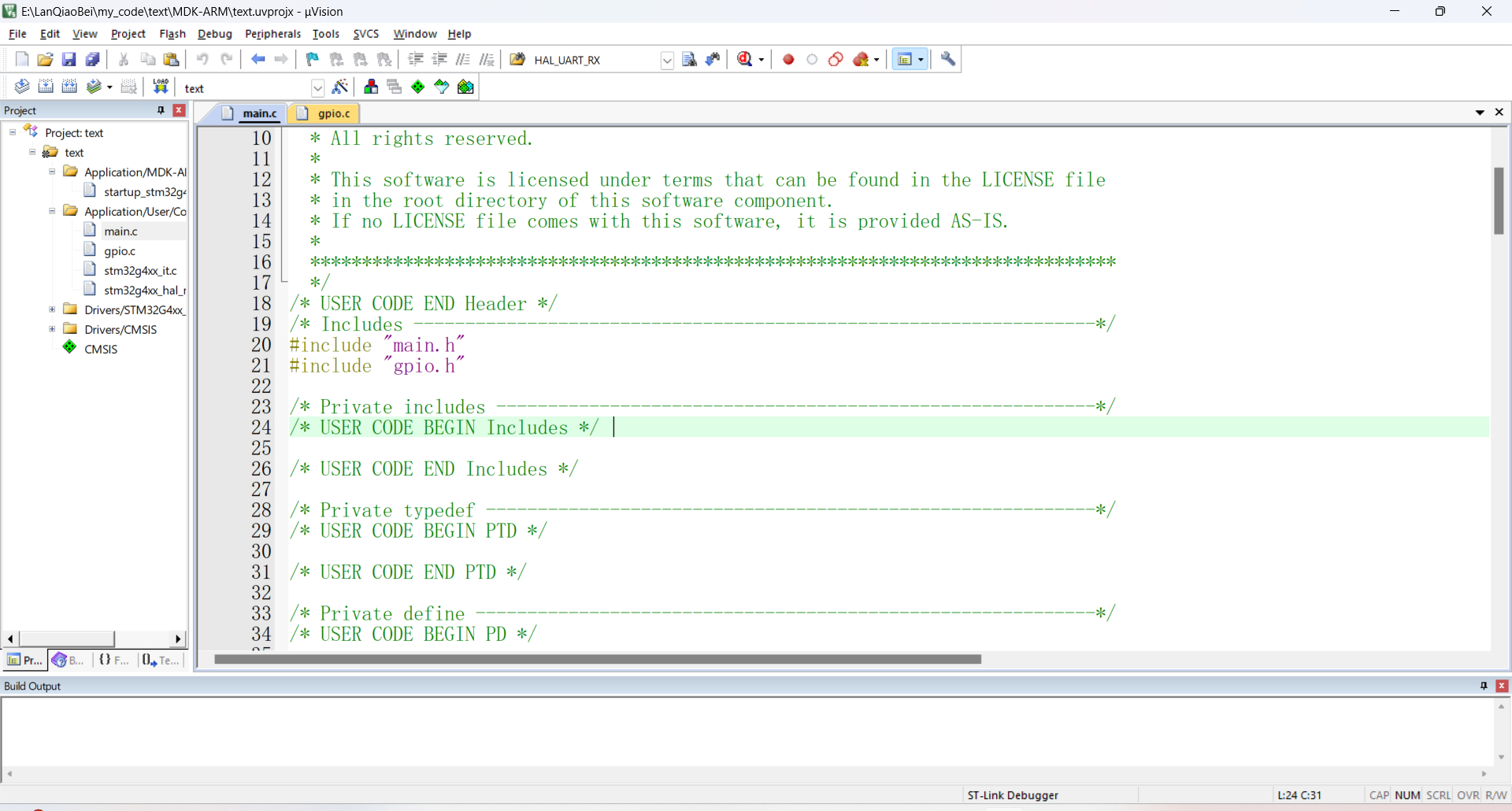
三、编写代码的注意事项
自己的代码必须写在规定的范围里,不然每次用cubemx重新生成代码时,自己所编写的代码可能被覆盖掉。
cubemx生成的main.c文件规范了,我们所编写代码存放的地方。
1.头文件

2.类型定义

3.宏定义

4.宏实现

5.变量

6.函数声明

7.用户的代码

自己编写的代码必须在 USER CODE BEGIN之后 USER CODE END之前。
四、采用分任务的方式
这里我们利用滴答时钟来实现分任务,我们可以新建一个数组,来表示任务多久时间运行一次,然后在SysTick_Handler中把这个数组的值减减,当这个时间数组的值为0是就运行这个任务,可能语言描述有点难以理解,这边直接用代码来理解。
这边假设有两个任务,一个是LCD的任务,一个是LCD的任务。
#define TASK_MAX 2
#define LEDTaskTimer sysTimer[0]
#define LCDTaskTimer sysTimer[1]
u32 sysTimer[TASK_MAX];//u32需要包含官方提供的lcd.h
void SysTick_Handler(void)//注意该函数在CubeMx生成代码的时候就会有,所以要在对应的stm32g4xx_it.c把他拷贝过来自己对应的.c文件
{
HAL_IncTick();
for(u8 i = 0;i < TASK_MAX;i++)
{
if(sysTimer[i])
{
sysTimer[i]--;
}
}
}
这个就是我们具体的分任务实现,那么任务该怎么写呢?
void LED_Task(void)
{
if(LEDTaskTimer)return;
LEDTaskTimer = 100;
/* 进行LED的任务逻辑*/
}
为了方便我们也可以把想什么时候运行一次的时间,用宏定义,方便修改
#define LEDTaskTimerPorid 100
#define LCDTaskTimerPorid 10
因为SysTick_Handler是1ms进一次中断,所以对应的任务时间数组,要经过对应的时间,才会被清0,才能进入对应的任务逻辑。
题目对应的模块我们就可以为他们依次建一个任务来运行,这样逻辑性就比较强,而且也方便实现。
五、LED的配置
1.CubeMX的配置
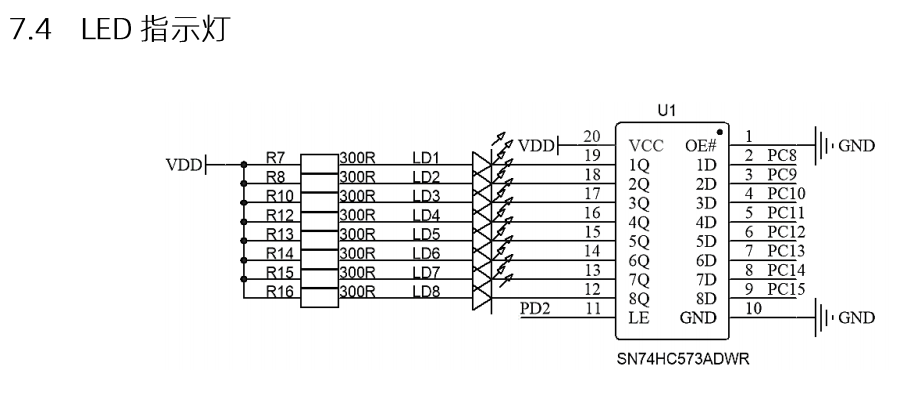
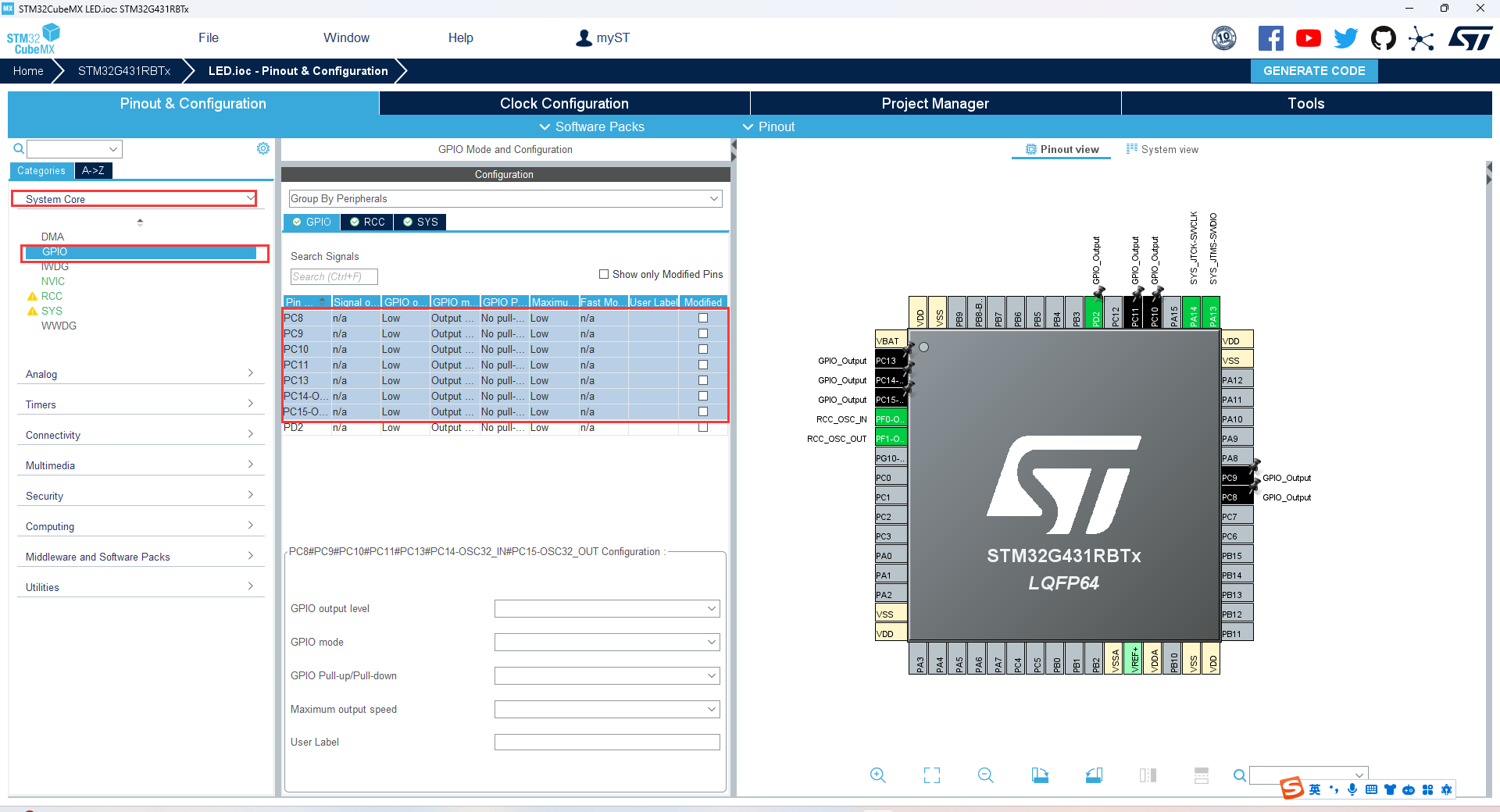
可以看到板载的LED灯是间接连接到PC8—PC15的,还要通过D 型锁存器(SN74HC573ADWR),D 型锁存器特别适用于实现缓冲寄存器、I/O 端口、双向总线驱动程序和工作寄存器。所以会发现直接操作PC8—PC15,LED灯是没有作用的,还要把锁存器打开。
当锁存使能 (LE) 输入为高电平时,
Q 输出响应数据 (D) 输入。 当 LE 为低电平时,输出被锁存以保留设置的数据。
用CubeMX配置所需要的引脚,把PC8—PC15和PD2的引脚配置为GPIO_Output.
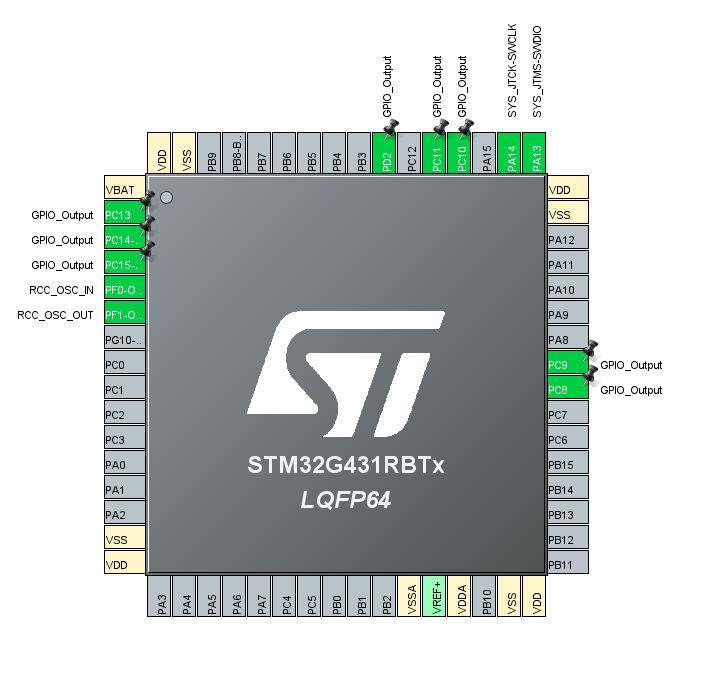
初始化状态灯应该是熄灭的,根据LED的的电路图,要把LED的引脚制高电平。
可以按住shift全选LED的引脚,设置为高电平。
这样就完成LED灯的初始化。
2.代码部分
接下来我将介绍如何让LED灯亮。
我先介绍一个HAL库函数。
void HAL_GPIO_WritePin(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState);
我们可以看到函数的参数有三个。
见名思意第一个参数是GPIO的端口。比如:GPIOA、GPIOB。
第二个参数是GPIO引脚。比如:GPIO_PIN_0,或者可以多个引脚组合GPIO_PIN_0 | GPIO_PIN_1(应该每一个引脚对应的二进制的每一个位)。
第三个参数就是引脚的输出状态了。GPIO_PIN_RESET(低电平)或者GPIO_PIN_SET(高电平)。
点亮LED灯只需要所对应的引脚置低电平,并且刷新一下锁存器。
所以我们可以建立一下专门控制LED灯亮灭的函数。
void LED_Disp(char pin)
{
GPIOC->ODR = ~(pin << 8);
//刷新锁存器
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
解释一下~(pin<<8)
- 这行代码将 GPIOC 端口的输出数据寄存器(ODR,Output Data Register)的值设置为
~(pin << 8)。 pin左移 8 位,然后将其取反,即将高位置0,低位置1。这个值被写入 GPIOC 的 ODR 寄存器,以控制相应的引脚输出低电平。
这样我们就完成对LED灯的控制。
3.分任务的形式
我们可以创建一个分任务用于控制LED,因为很多时候题目都是要求LED灯在特定的条件下做出提示。
所以我们就可以定义一个LED灯状态的值,通过分任务的形式来控制LED灯的闪烁或者常亮。
#define LEDTaskTimerPorid 100
char LEDState = 0x00;
void LED_Task(void)
{
if(LEDTaskTimer)return;
LEDTaskTimer = LEDTaskTimerPorid;
/* 进行LED的任务逻辑*/
if(flag)//假设某种状态下LED1要0.1 秒为间隔亮、灭闪烁
{
LEDState ^= 0x01;
}
else
{
LEDState &= ~0x01;
}
LED_Disp(LEDState);
}
六、LCD
1.LCD移植
在考试的时候,官方会提供给我们一个文件。
可以看到有一个液晶驱动参考历程。
点进去就会发现有个hal库的历程。
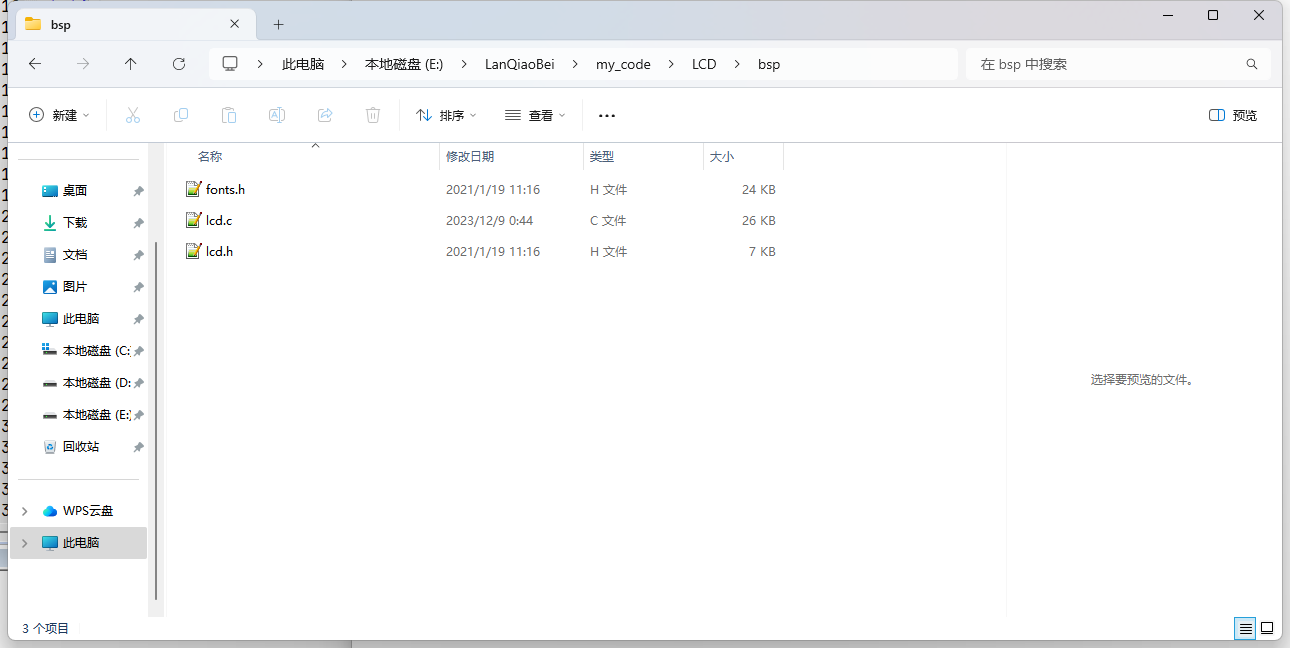
点进去可以看到有工程文件夹,在Inc中把lcd.h、fonts.h 和 Src 的lcd.c复制移植到我们的bsp文件中。
接下来我们来看看官方给的历程是如何使用LCD的。
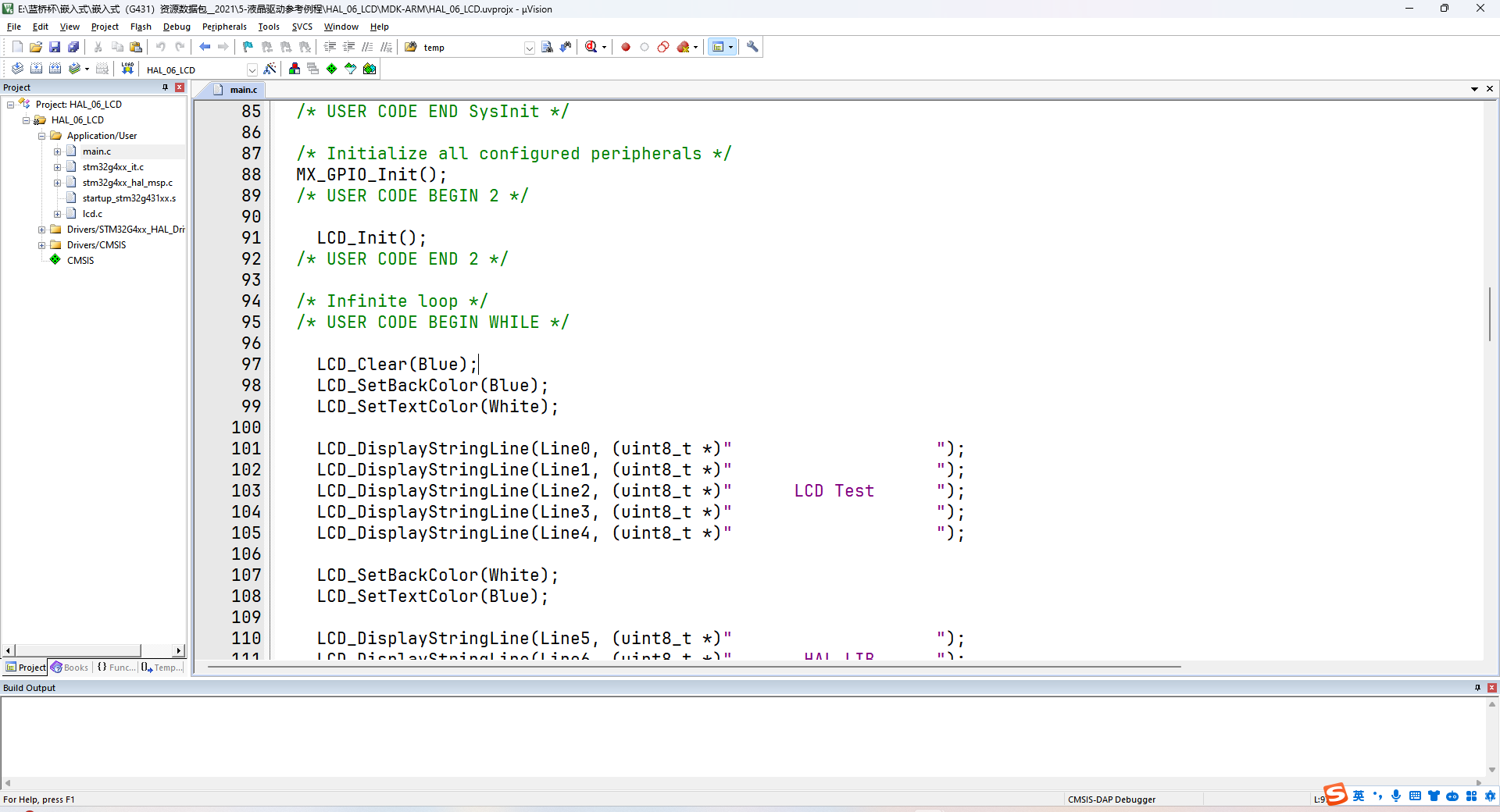
- 可以看到先调用LCD_Init()对LCD进行初始化
- 调用LCD_Clear(Blue)对LCD屏进行清屏(用蓝色填充)
- 调用LCD_SetBackColor(Blue)设置背景颜色为蓝色
- 再调用LCD_SetTextColor(White)设置字体的颜色为白色
- 以及LCD的显示函数
所以在我们的代码中只需要跟着照做就行,先对lcd进行初始化,然后并清屏设置自己所需要的颜色。
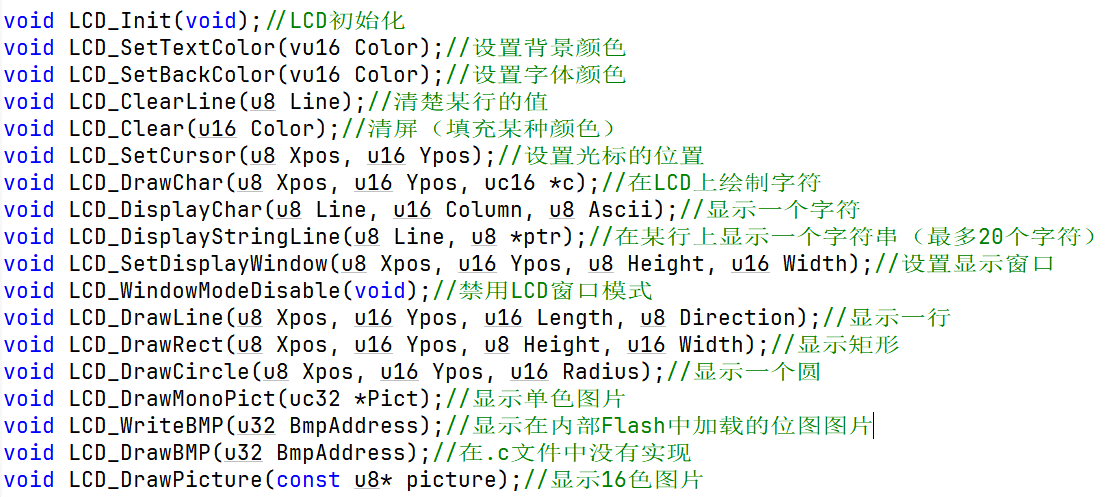
接下来带大家了解一下官方提供了那些LCD的函数以及宏。
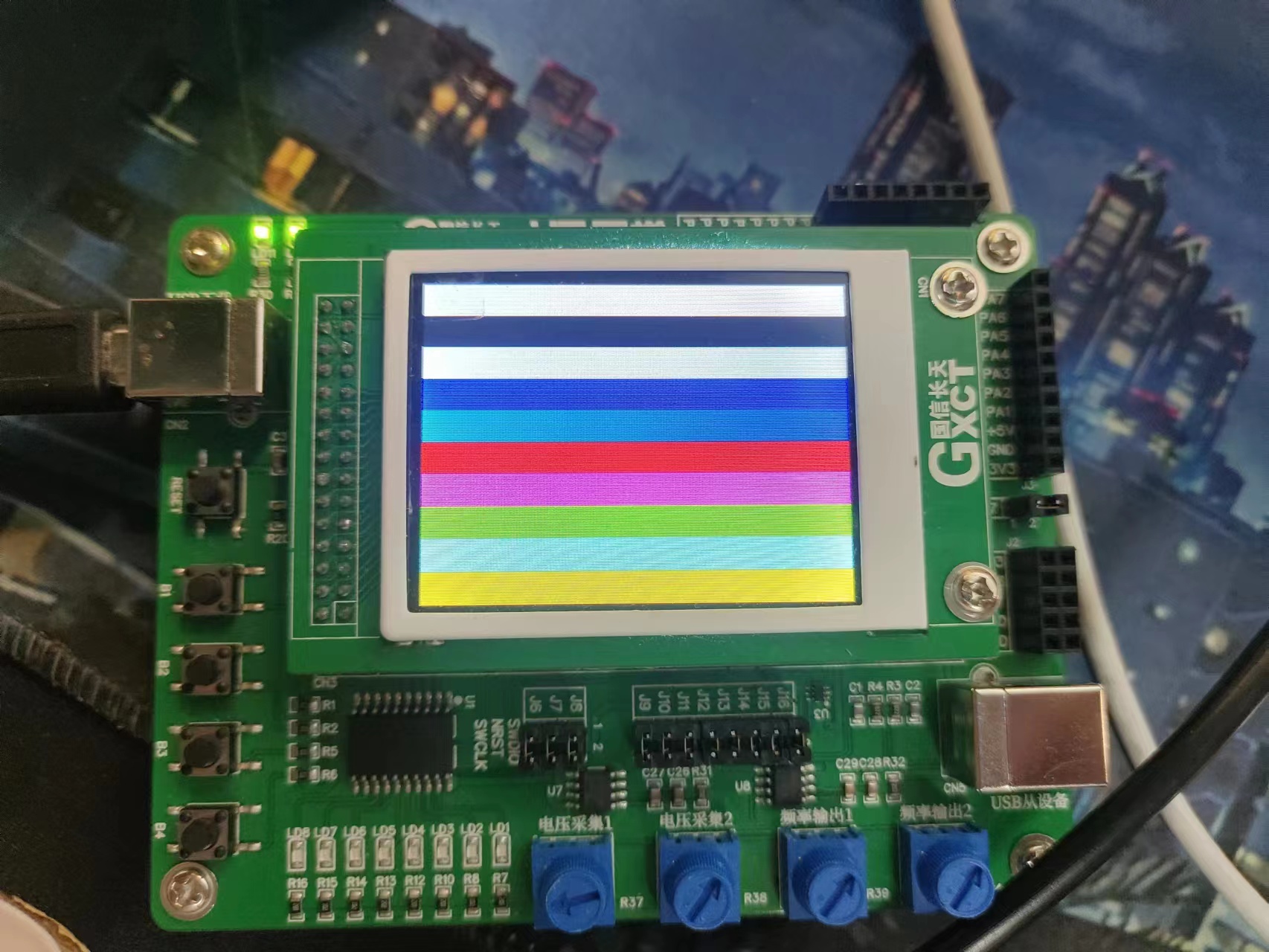
先来看一下官方提供了那些颜色
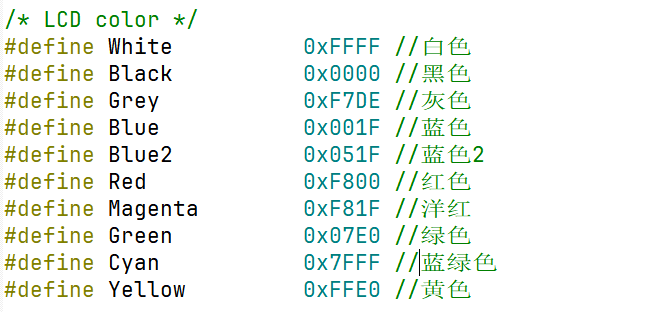
大家可以自己尝试一下这个颜色都是什么样的,下面我带大家看一下这些颜色,顺序是跟上面对应的。
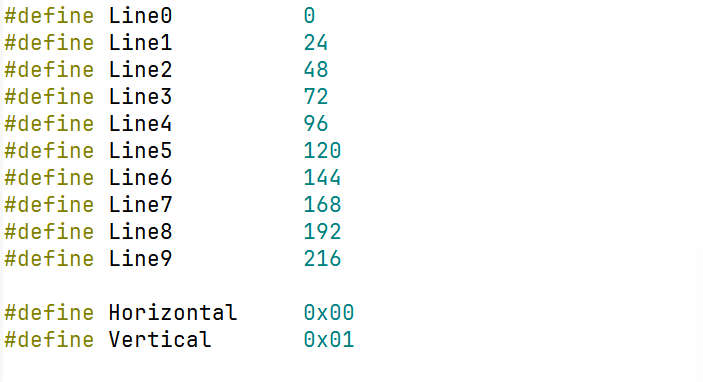
下面是行号和显示状态(水平或者垂直)
下面是提供的方法,大家可以自己尝试一下具体的作用。
2.分任务的形式
同上面一样,我们也采用分任务的形式来显示题目对应的内容,因为有时候题目要求我们要显示一个变化的值,这时候我们就可以采用c语言的库函数sprintf,他和printf的区别就是他多了个参数,用于接收对应的内容,printf是把我们输入的内容打印到标准的输出流,也就是屏幕,而sprintf是把对应的内容输出到数组中去,所以我们就可以利用这个特性来比较简单的显示一些变量。
#define LCDTaskTimerPorid 200//只是方便展示,这个对应的任务时间应该放在一起,方便修改
char view = 0;
float fre = 100;//其他任务更新这个值
char text[30];
void LCD_Task(void)
{
if(LCDTaskTimer)return;
LCDTaskTimer = LCDTaskTimerPorid;
if(view == 0)//不同的界面
{
sprintf(text," fre : %.2f ",fre);
LCD_DisplayStringLine(Line0,(u8*)text);
}
else if(view == 1)
{
sprintf(text," ");//如果对应的第二个界面这一行不用显示,
//不要用清屏函数,直接用空白字符覆盖进行就行
LCD_DisplayStringLine(Line0,(u8*)text);
/* 显示其他内容 */
}
}
3.LCD翻转
-
垂直方向
改变LCD的R1
//从上到下 LCD_WriteReg(R1,0x0000); //从下到上 LCD_WriteReg(R1,0x0100); -
水平方向
改变LCD的R96
//从左到右 LCD_WriteReg(R96,0x2700); //从右到左 LCD_WriteReg(R96,0xA700);
七、Timer定时的配置
1.CubeMX的配置
选择一个Timer,可以看到STM32G431RBT6的Timer资源很丰富。
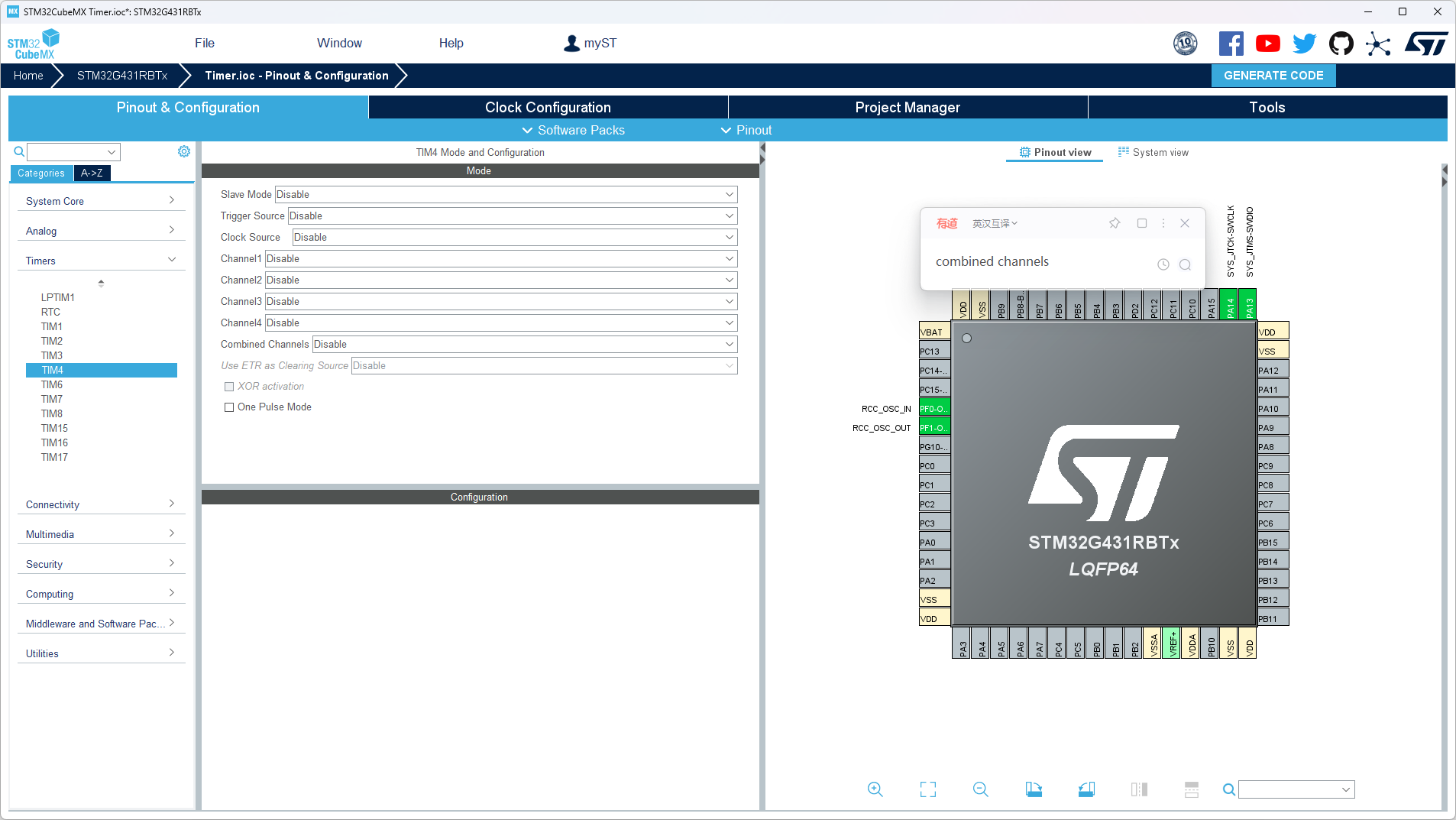
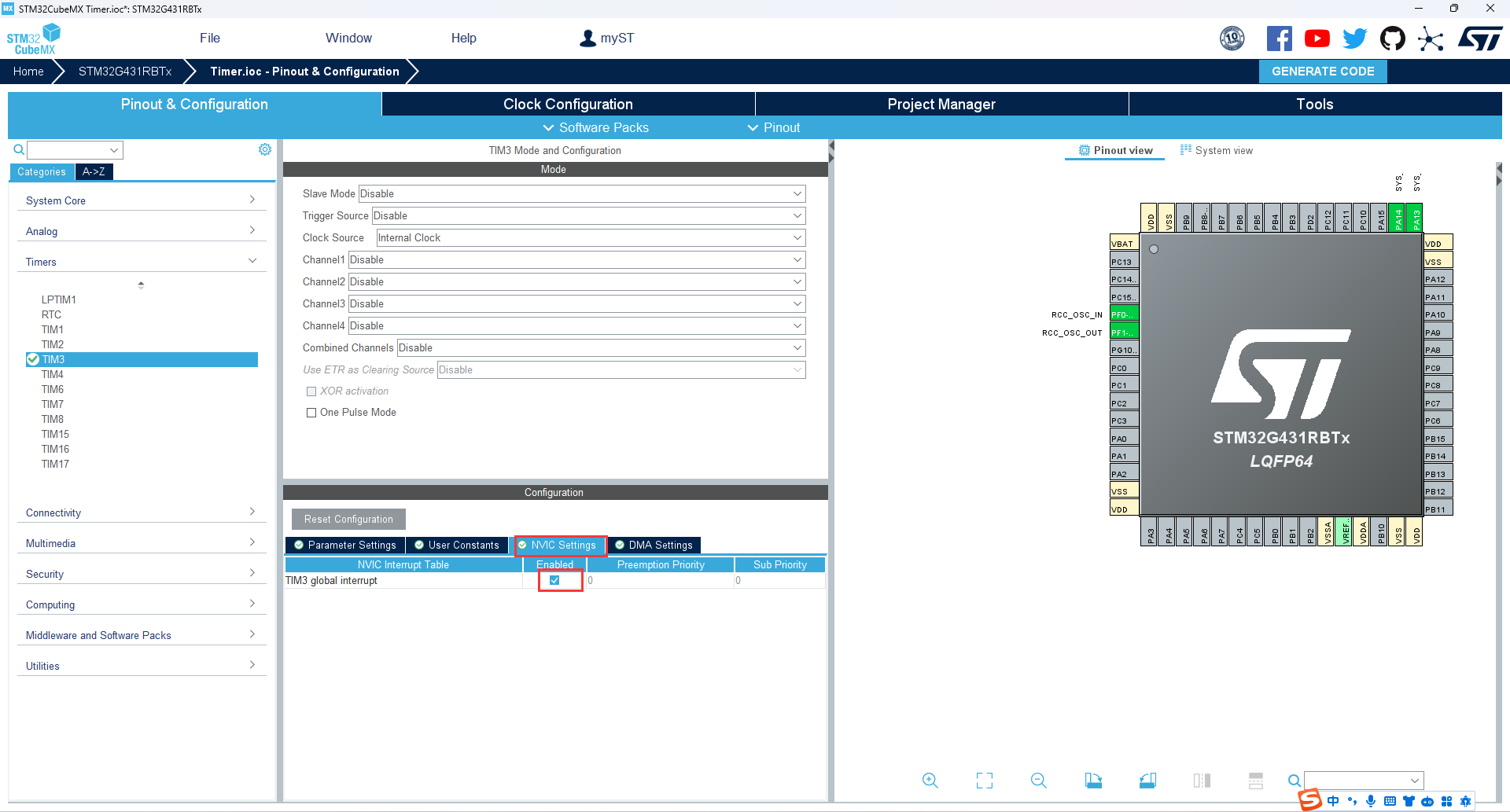
我们选择任意一个Timer来完成定时功能。这里我选择TIM3。
可以看到定时器有很多配置:Slave Mode(从模式)、Trigger Source(触发源)、Clock Source(时钟源)以及通道的配置。
作为定时功能只需配置时钟源和开启中断就行。
那么定时多少进一次中断,是如何配置的呢。
定时器进入中断的频率取决于定时器的配置,具体来说是定时器的分频器(prescaler)、重载值(reload value)以及系统时钟频率。计算中断频率的公式如下:
中断频率 = C K P S C ( P S C + 1 ) ∗ ( A R R + 1 ) = 时钟频率 (分频系数 + 1 ) ∗ (重装值 + 1 ) 中断频率 = \frac{CKPSC}{(PSC + 1)*(ARR+1)}=\frac{时钟频率}{(分频系数+1)*(重装值+1)} 中断频率=(PSC+1)∗(ARR+1)CKPSC=(分频系数+1)∗(重装值+1)时钟频率
t = 1 中断频率 = ( P S C + 1 ) ∗ ( A R R + 1 ) C K P S C t=\frac{1}{中断频率}=\frac{(PSC+1)*(ARR+1)}{CKPSC} t=中断频率1=CKPSC(PSC+1)∗(ARR+1)

在一开始的时钟配置的时候,我们把CK_PSC设为80MHZ。
如果我要10ms进一次中断,那么psc的值和arr的值该怎么设置。
为了方便计算一般把PSC设置为 8 ∗ 1 0 n − 1 8*10^n-1 8∗10n−1,然后再计算ARR的值。
这边我把PSC的值设为80-1,所以ARR的值是
0.01 = ( a r r + 1 ) ∗ 80 80000000 0.01=\frac{(arr+1)*80}{80000000} 0.01=80000000(arr+1)∗80
所以arr的值为100000 -1。PSC和ARR的值可以自己设定,只要不超过范围就行。
最后一步只要开启中断,CubeMx的配置就完成了。
2.代码的配置
手动启动定时器

CubeMx只是设置了定时器的各种参数,但它并不会自动开始计数或触发中断。启动定时器的具体操作需要在应用程序中手动调用相应的函数。htim3就是由CubeMx生成的。
那么该如何编写中断服务函数呢?
void HAL_TIM_IRQHandler(TIM_HandleTypeDef *htim)是处理TIM中断请求。在这个函数中有个回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)所以我们只需在这个函数中处理我们所需要的逻辑。
先判断定时器是不是TIM3,然后再进行处理

此时每10ms进一次中断。
八、按钮的配置
1.CubeMx的配置
通过查看产品手册可以看到,官方提供的开发板有四个按钮分别是PB1 PB2 PB3 PB4,并且还是并联一个上拉电阻,所以GPIO应该设置为输入模式并且是上拉模式。
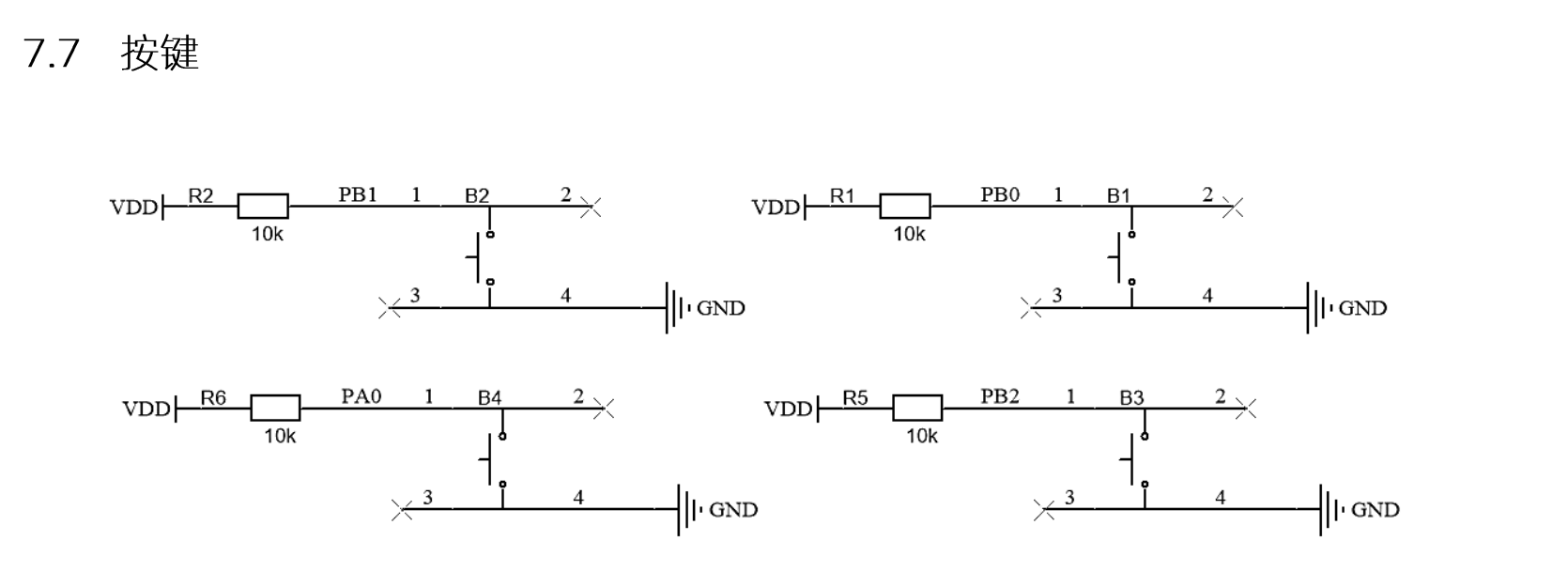

这样就完成看按钮的配置,那我们如何来判断按钮。
2.代码部分
由于按钮是机械结构,被按下是会产生抖动,使得电路信号也会抖动,常见的处理就是硬件防抖(加个电容)或者软件防抖。
软件防抖的方式有延时和状态机。这里推荐用状态机的写法。
定义一个结构体来表示按钮的状态。
typedef struct
{
char keyMode;//按钮的模式
bool keyState;//按钮的状态
bool keyLongFlag;//按钮长按的标志
bool keyShortFlag;//按钮短按的标志
uint32_t keyTime;//按钮被按下的时间
}keyFlag;
开启一个定时器,定时时间为10ms进一次中断。
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM4)//判断是Timer几产生的中断
{
//读取按钮状态
key[0].keyState = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1);
key[1].keyState = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_2);
key[2].keyState = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3);
key[3].keyState = HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4);
for (int i = 0; i < 4; i++)
{
switch (key[i].keyMode)
{
case 0:
// 模式0:按键空闲状态
if (key[i].keyState == 0)
{
// 如果按键被按下
key[i].keyMode = 1;
key[i].keyTime = 0; // 重置按键时间
}
break;
case 1:
// 模式1:按键按下检测中
if (key[i].keyState == 0)
{
// 如果按键仍然被按下
key[i].keyMode = 2;
key[i].keyTime++;//按下时间加一
}
else
{
// 如果按键被释放
key[i].keyMode = 0;
}
break;
case 2:
// 模式2:按键释放和长按检测中
if (key[i].keyState == 1)
{
// 如果按键被释放
key[i].keyMode = 0;
if (key[i].keyTime < 70)
{
// 如果按键时间短,标记为短按
key[i].keyShortFlag = 1;
}
}
else
{
// 如果按键仍然被按下
key[i].keyTime++;
if (key[i].keyTime > 70)//因为定时器是10ms进一次,所以就是70*10=700ms
{
// 如果按键时间长,标记为长按
key[i].keyLongFlag = 1;
}
}
break;
}
}
}
}
九、UART配置
1.CubeMx的配置
对于串口来说CubeMx的配置很简单,只需把usart1的模式改为Asynchronous(异步模式)。
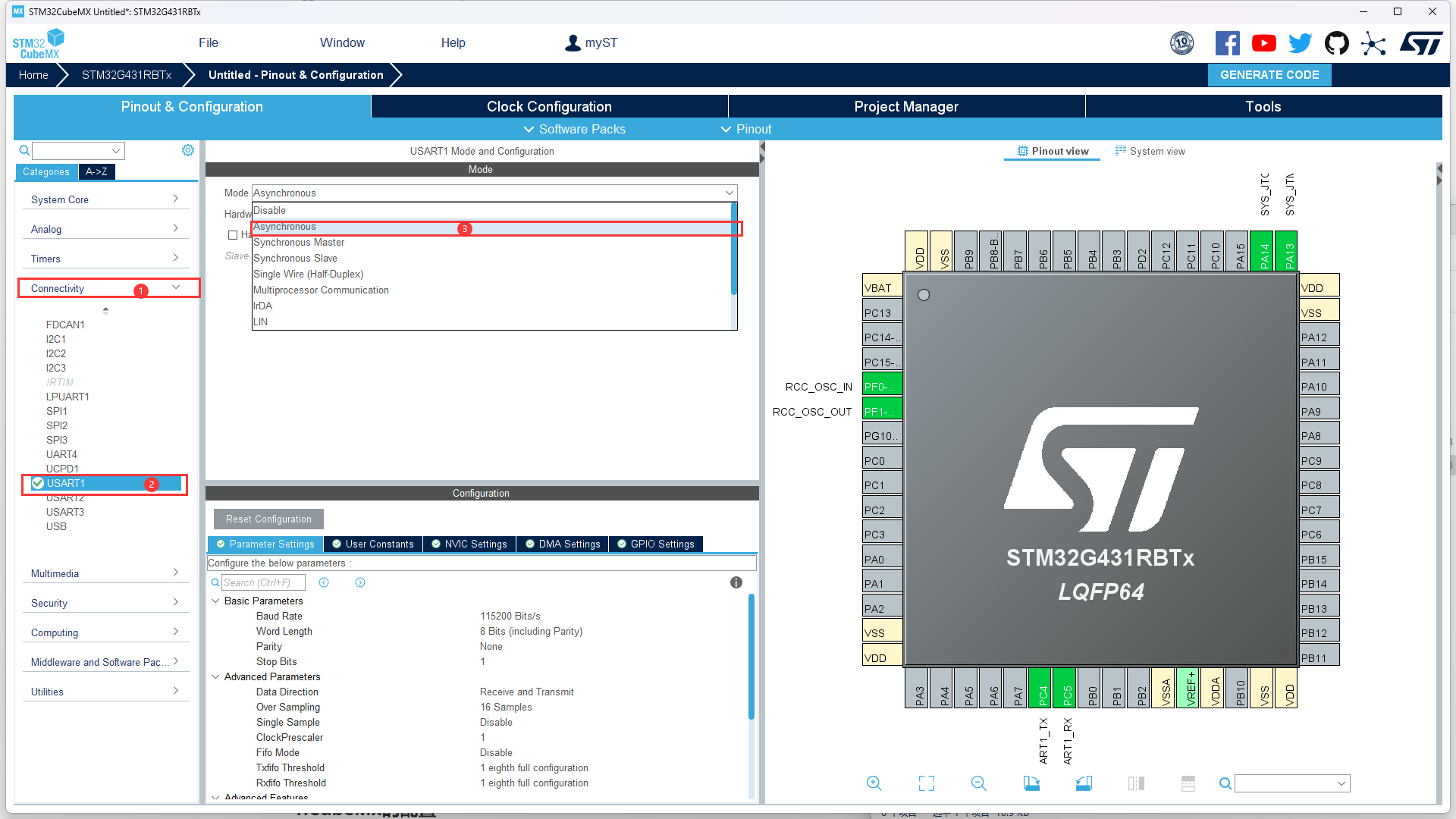
我们可以看到此时的PC4、PC5作为串口一的TX、RX。但是实际上开发板的串口一是和daplink的RX、TX连接,然后转发给电脑。
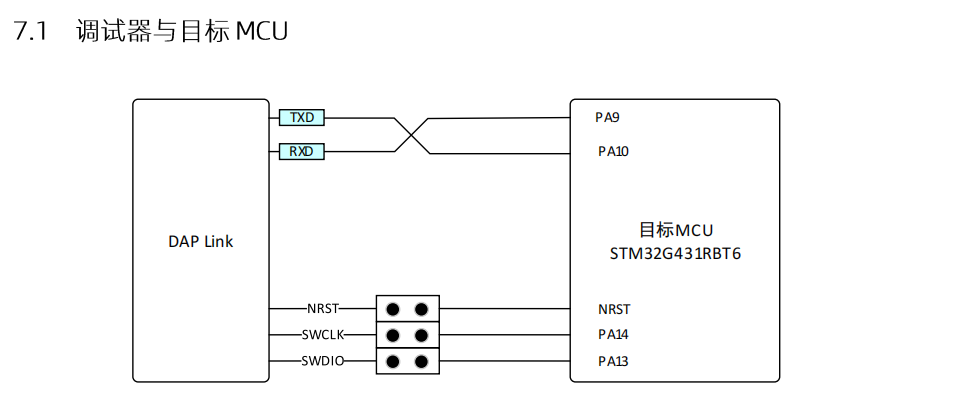
所以如果改完模式的时候,默认的串口TX、RX不是PA9、PA10,需要手动更改为PA9、PA10.
接下来是串口的参数配置
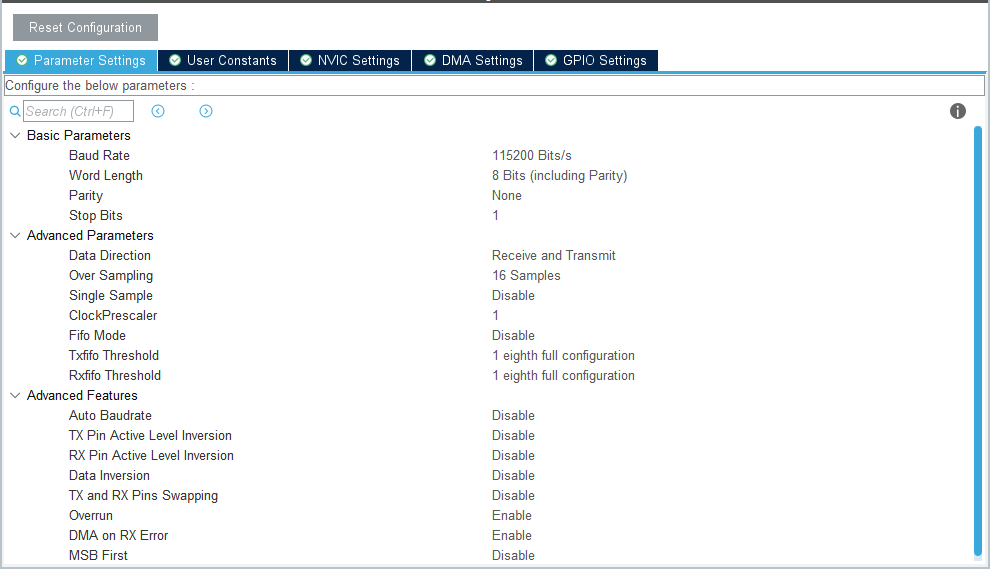
- Baud Rate:串口的波特率
- Word Length :数据位
- Parity:效应位
- Stop Bits:停止位
这些参数根据题目的要求设置。
如果要接收数据,我采用的方法是DMA+串口空闲中断
首先配置串口的RX的DMA
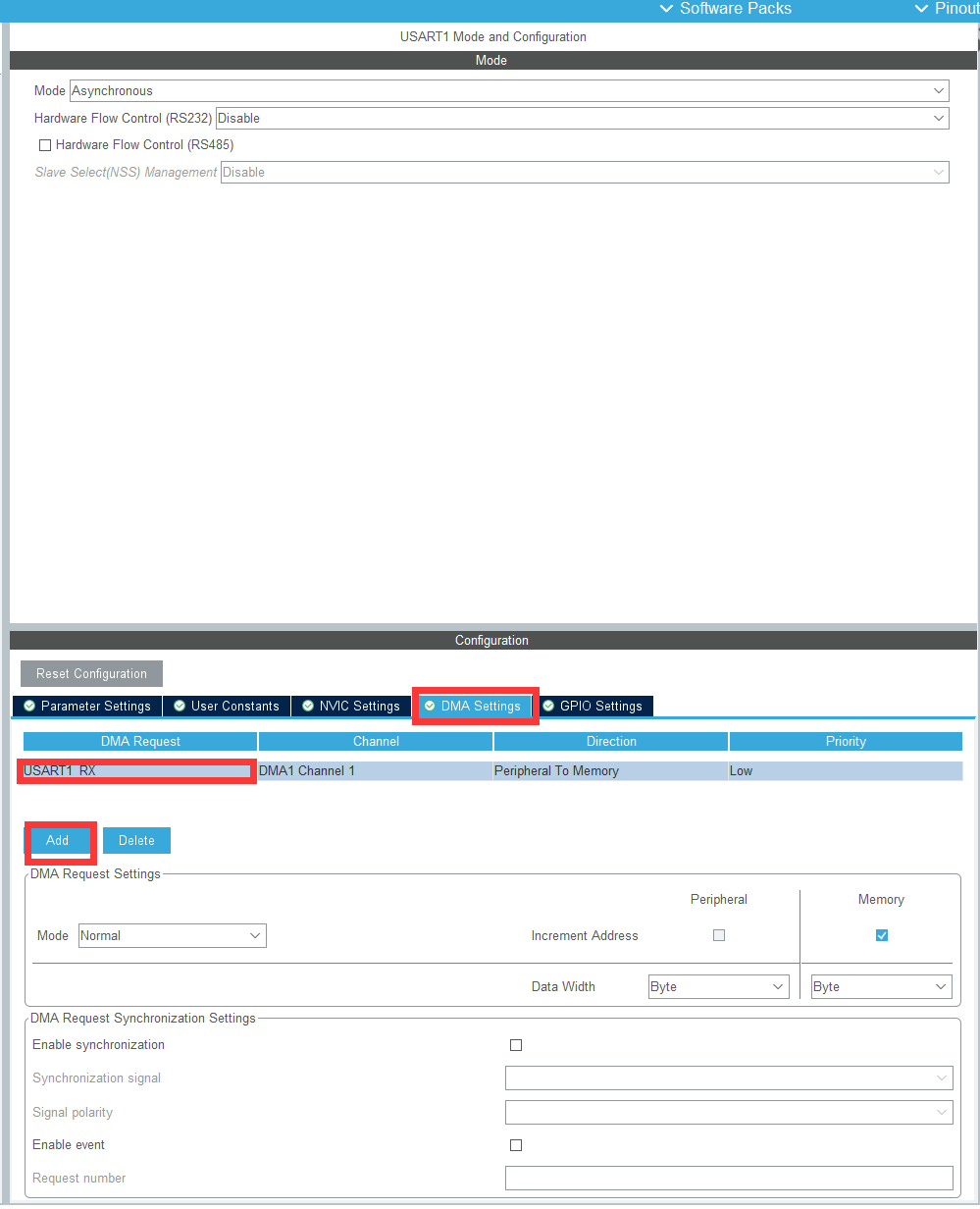
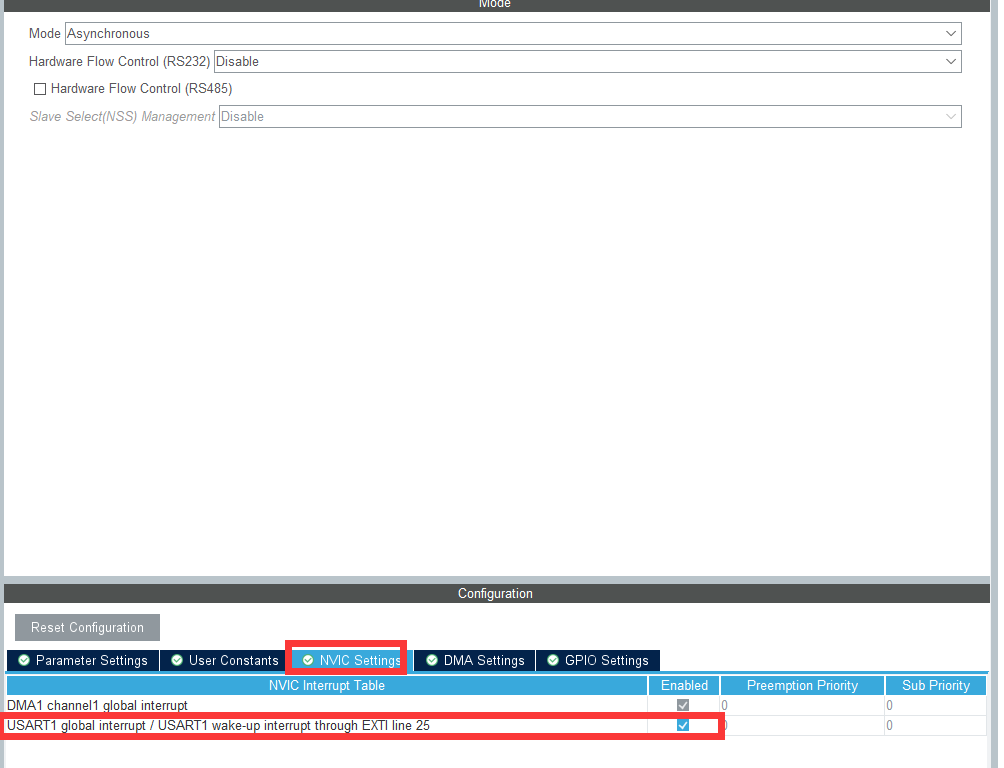
使用串口空闲中断,必须开启串口全局中断
2.代码编写
- 串口发送
串口的发送函数HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, const uint8_t *pData, uint16_t Size, uint32_t Timeout)
char text[] = "Hello world\r\n";
HAL_UART_Transmit(&huart1,text,strlen(text),HAL_MAX_DELAY);
- 串口的接收
只需要在初始化后开启HAL_UARTEx_ReceiveToIdle_DMA,串口接收完成数据,就会触发空闲中断,此时我们只需要在中断回调服务函数中处理接收的数据即可
int main(void)
{
//init
......
//开启串口接收
HAL_UARTEx_ReceiveToIdle_DMA(&huart1,text,30);//后面的参数意思是允许接收最大的字节
}
//中断回调函数
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
if(huart == &huart1)
{
HAL_UART_Transmit(&huart1,text,Size,HAL_MAX_DELAY);
HAL_UARTEx_ReceiveToIdle_DMA(&huart1,text,30);//再次开启接收
}
}
注意:串口的过半中断也可以触发上面的中断服务函数
解决方法:
- 把接收数组设置大点
- 把过半中断关闭:
__HAL_DMA_DISABLE_IT(&hdma_usart1_rx,DMA_IT_HT;(hdma_usart1_rx可能需要extern声明外部变量)
十、PWM输出(PWM模式)
1.CubeMx配置
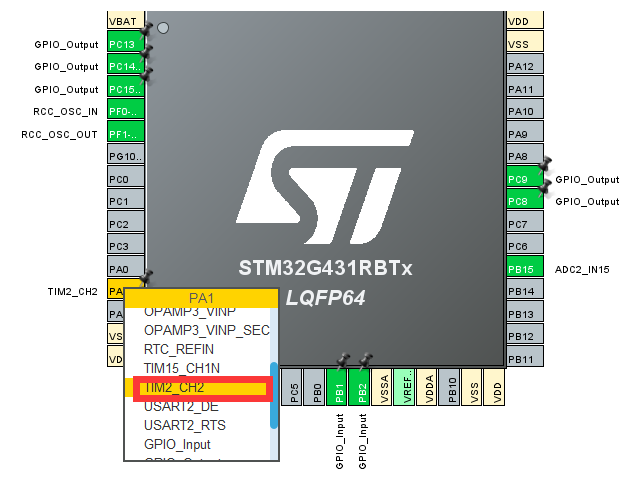
选择要输出的引脚,配置成定时器通道TIMX_CHX
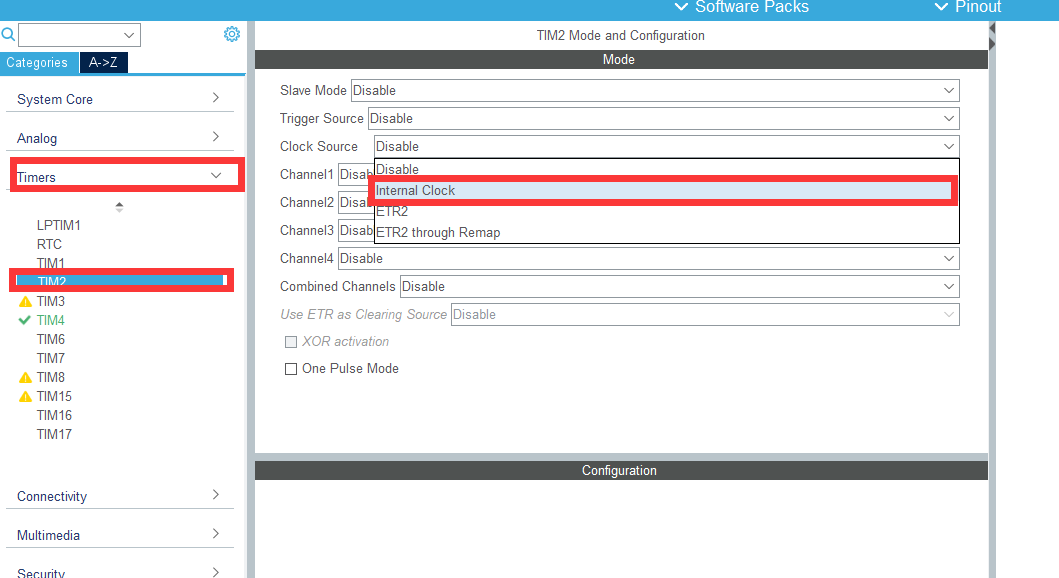
接下来在Timers中选择对应的定时器,指定时钟源为内部时钟。
选择对应的通道输出PWM Generation CH4
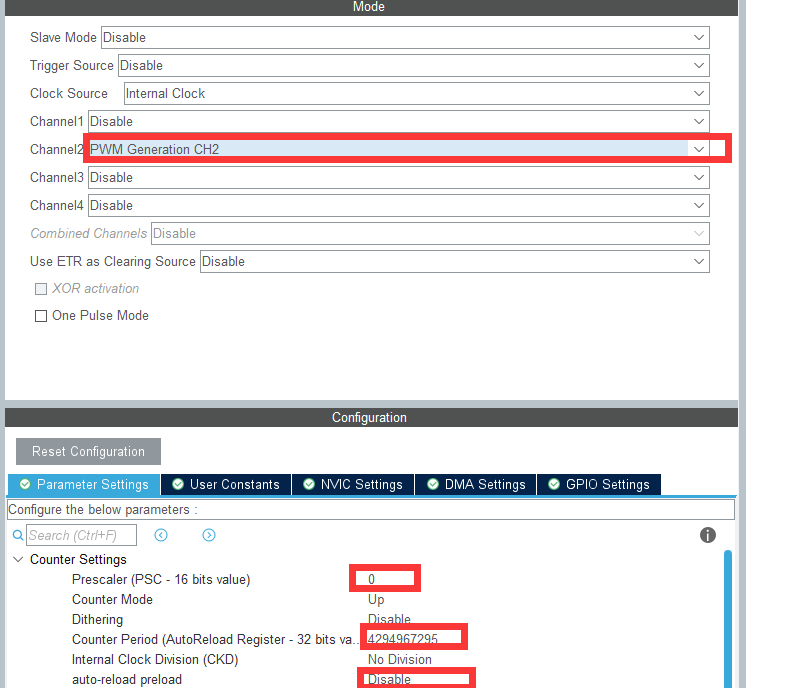
Prescaler:时钟预分频数(PSC),这边为了方便计算可以设为80 - 1Counter Mode:计算模式,Up向上计数Counter Period:自动重装载值(ARR)。auto-rekoad preload:自动重装载使能

Mode:定时模式,PWM mode 1Pulse:计数比较值(CCR)Output compare preload:输出比较预加载Fast Mode:脉冲快速模式CH Polarity:输出极性
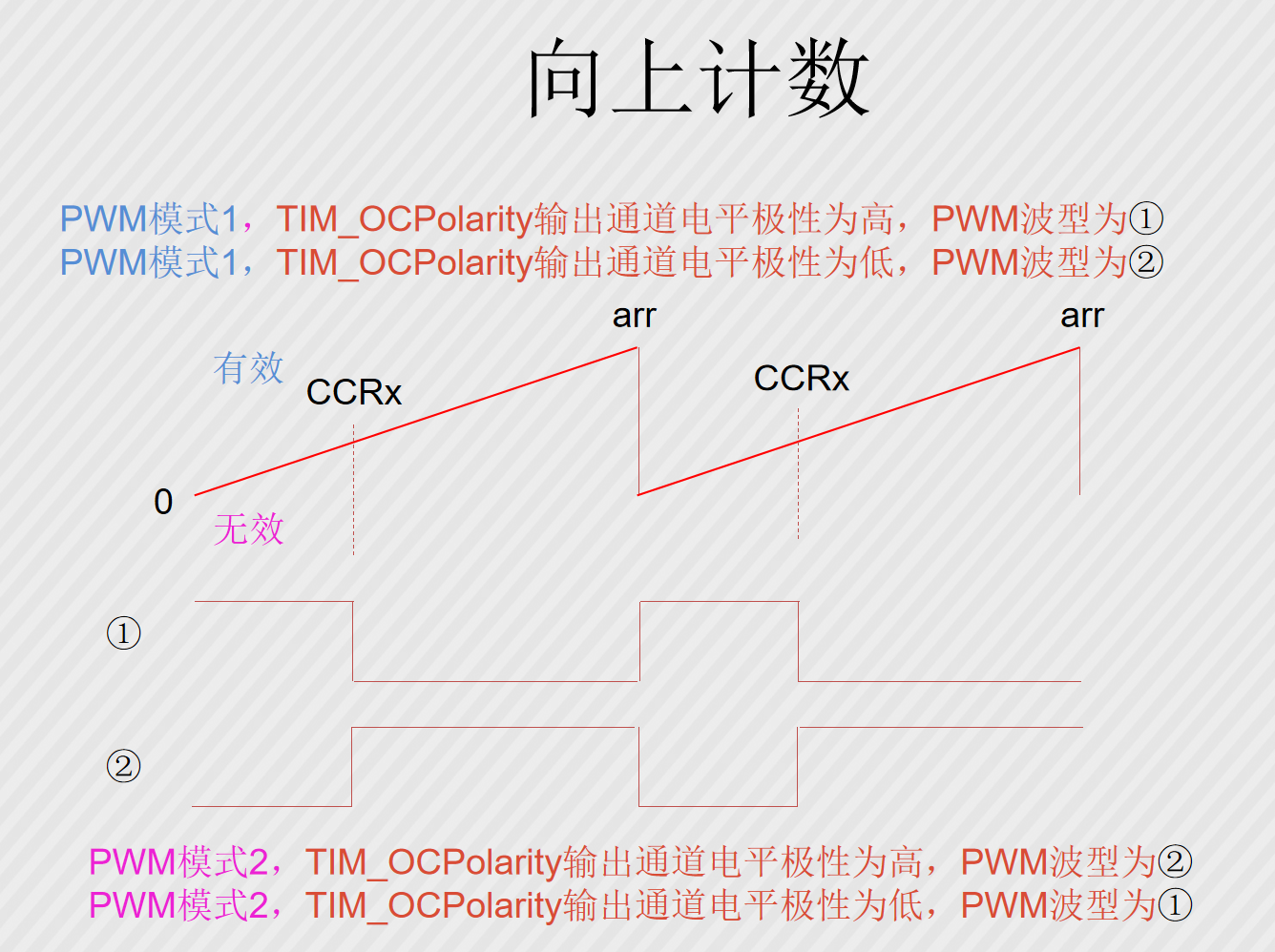
PWM选择模式1,这样CCR/ARR就是对应高电平的时间,也就是占空比。
假设我们这边要输出一个 1KHz的方波。
PSC 可以设为 80 -1 ARR:1000-1 CCR: 500 - 1
因为时钟的频率是80MHZ,所以输出的PWM频率就是80000000/80/1000=1000
2.代码的编写
我们已经把PWM的输出配置好了,但是要开始产生PWM输出,我们还需要调用
HAL_StatusTypeDef HAL_TIM_PWM_Start(TIM_HandleTypeDef *htim, uint32_t Channel)
因为我们这边是TIM2的通道2,所以要HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
此时PA1引脚才正式的输出PWM
3.变化频率以及占空比
想要变化频率就要改变ARR的值,想改变占空比就改变CCR的值。
- 改变频率
__HAL_TIM_SetAutoreload():改变ARR的值
例:__HAL_TIM_SetAutoreload(&htim2,500-1);
-
改变占空比
__HAL_TIM_SetCompare()例:
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,50);可以直接改变TIMx->CCRx的值,来改变CCR
十一、PWM输出(输出比较模式)
通过定时器TIM的输出比较模式得到的预定频率与占空比的PWM波形;其中定时器 的输出比较模式与PWM模式的区别在于PWM模式在同一个TIM下所有输出口的频率一致不能单独控制单个频率,而输出比较就弥补了这一缺点,可以对同一个TIM下的各个输出口分别设置频率。
重要的是比赛要求的输出不同占空比和频率时,用此方法比较简单
1.CubeMx的配置
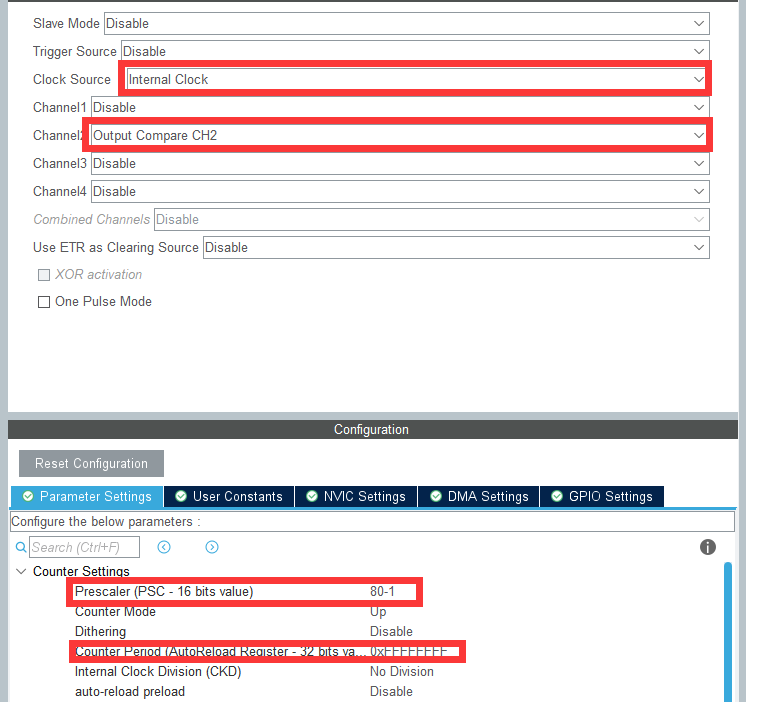
Clock Source:时钟源,选择内部时钟即可。Channel2:通道2,选择Output Compare CH2(输出比较)Prescaler:时钟分频系数,这边为了方便计算设为80 - 1Counter Period:自动预装载值,设为最大即可。
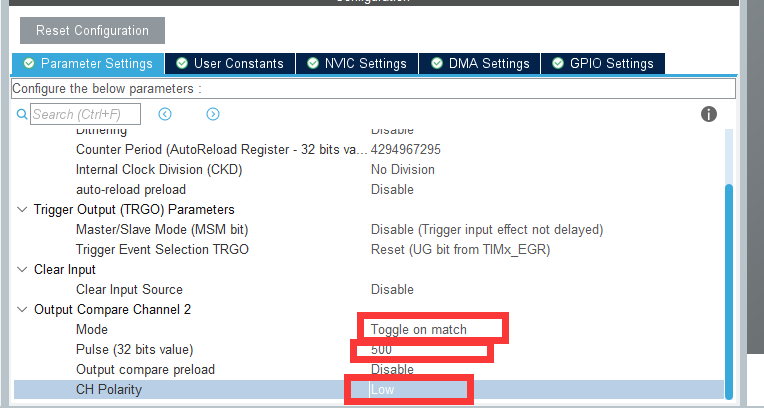
- Mode:选择 Toggle on match
- Pulse:这边只需要指不为0就行
- Ch Polarity 设为低电平(这边也可以设为高电平,但是下面的代码要有所变动)
开启全局中断

2.代码编写
int main(void)
{
//init
......
//开启输出比较
HAL_TIM_OC_Start_IT(&htim2,TIM_CHANNEL_2);
}
//编写输出比较中断回调函数
int fra = 1000;//输出的频率
float duty = 0.2;//占空比
void HAL_TIM_OC_DelayElapsedCallback(TIM_HandleTypeDef *htim)
{
static char flag = 0;
if(htim->Instance == TIM2)
{
if(htim->Channel == HAL_TIM_ACTIVE_CHANNEL_2)
{
int val = TIM2->CCR2;
if(!flag)//低电平有效时间
{
TIM2->CCR2 = val + (1000000 / fra) * (1 - duty);
}
else//高电平有效时间
{
TIM2->CCR2 = val + (1000000 / fra) * duty;
}
flag = !flag;
}
}
}
能力有限,我尽量表诉一下我的理解。
一开始的CCR值假设为100,因为我们psc设置为80-1,所以计算频率就是1Mhz,有效电平为低电平,所以当CNT == CCR的时候进入中断,电平翻转变为高电平。第一次进入中断TIM2->CCR2 = val + (1000000 / fra) * duty,此时CCR的值被增加高电平值,所以当CNT再次等于CCR,电平再次翻转变为低电平,TIM2->CCR2 = val + (1000000 / fra) * (1 - duty),CCR的值增加了低电平所需要的值。这样就形成了一个周期。
注意:输出比较对于需要突变或者在某段时间递增的时候好用,但是在需要输出高低电平的时候就有问题,对于低频信号则需要变大PSC的值。
十二、输入捕获
1.CubeMX的配置
这边以PA6来做为例子。注:基本定时器是不能入捕获。
这边我们使用定时器TIM3的通道1来捕获波形
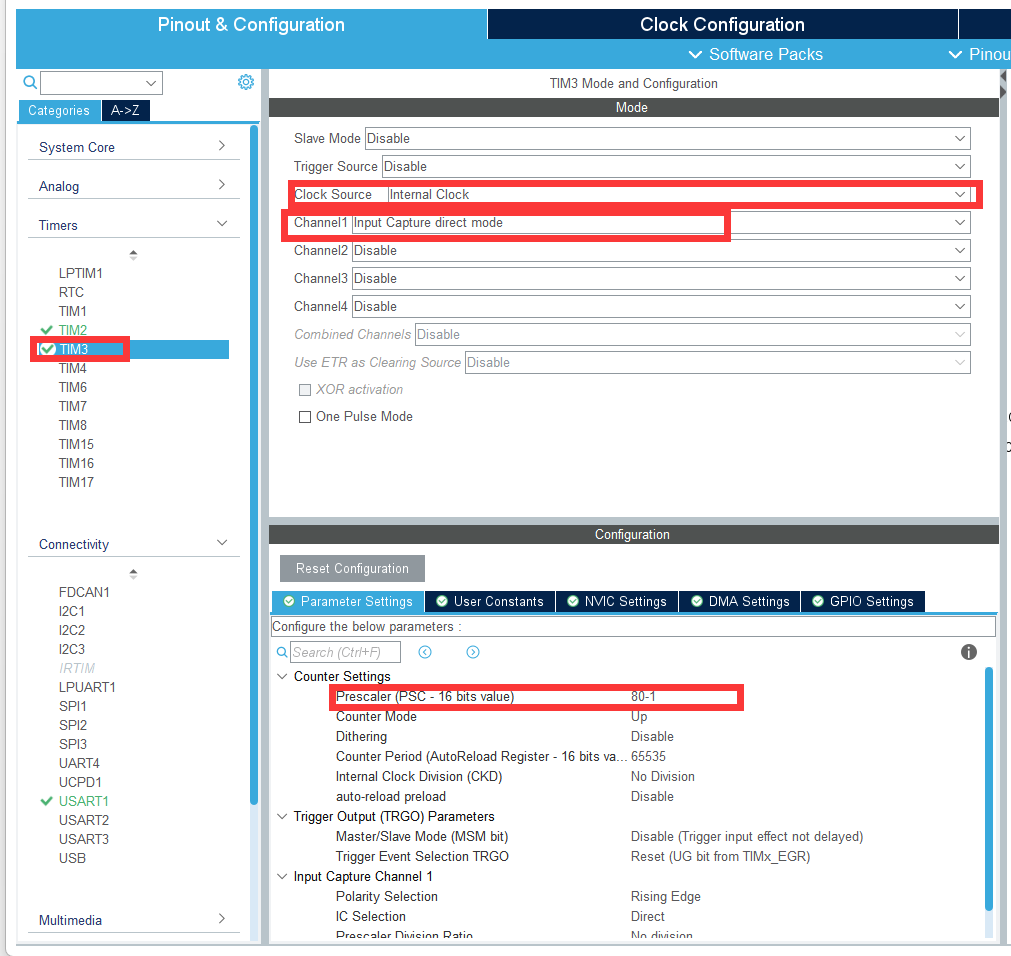
- 开启时钟
- 通道一:直接输入模式
- PSC:80-1
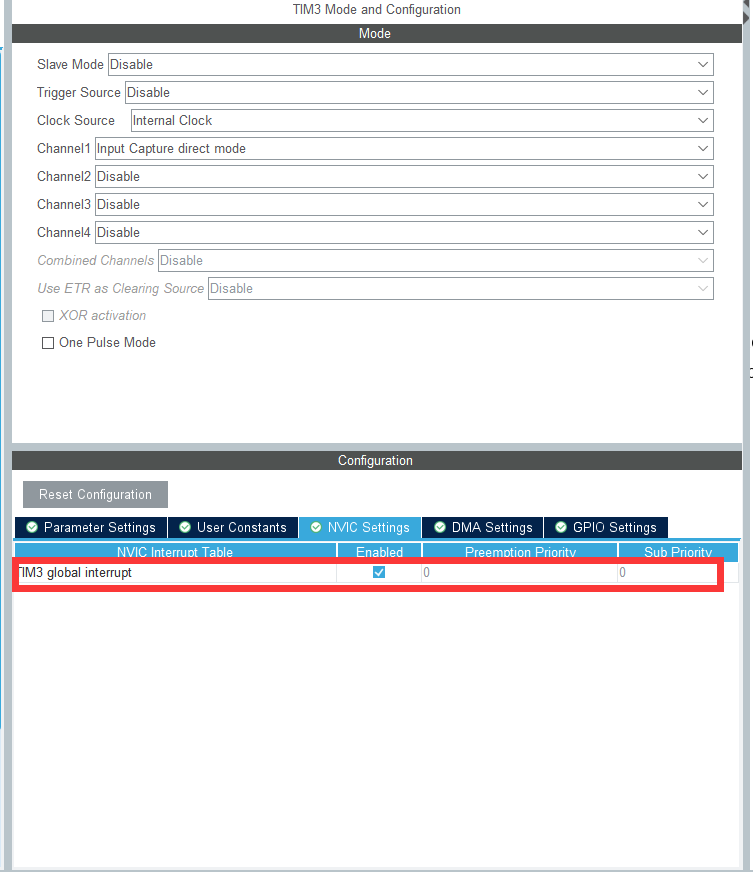
这边不要忘记开启中断
2.代码的编写
int main(void)
{
//init
....
//开启定时器3通道一的输入捕获
HAL_TIM_IC_Start_IT(&htim3,TIM_CHANNEL_1);
}
uint32_t PA6_fra = 0;
uint32_t ccr1_val2;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)
{
PA6_fra = 80000000 / 80 / (TIM3->CCR1 + 1);
TIM3->CNT = 0;
HAL_TIM_IC_Start(htim,TIM_CHANNEL_1);
}
}
}
3.测占空比
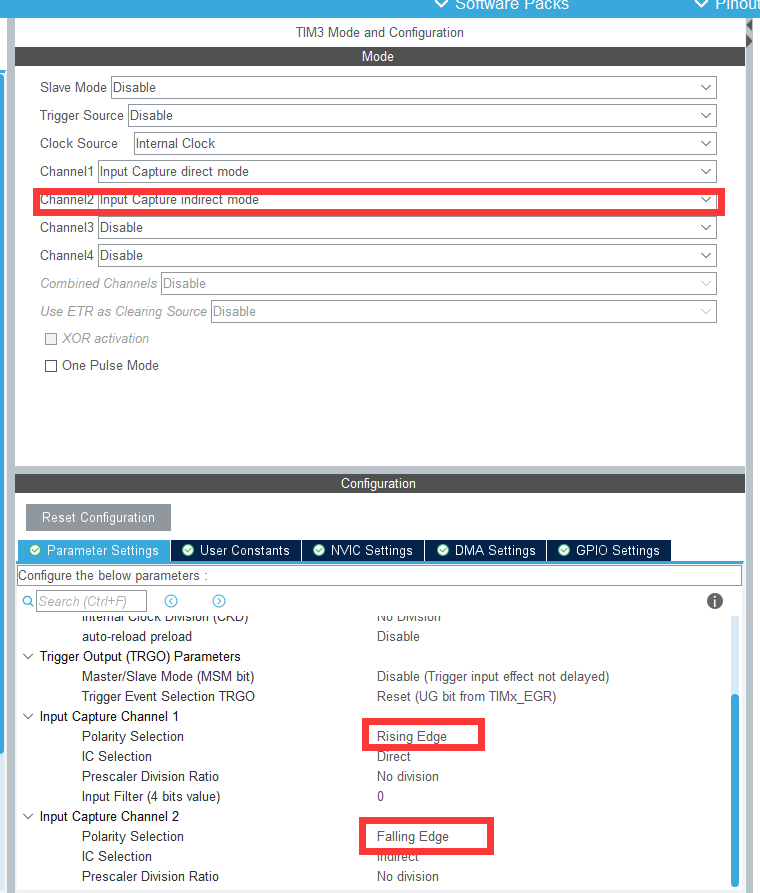
只需要开启通道二的间接模式,以及通道一上升沿触发,通道二下降沿触发。
uint32_t PA6_fra = 0;
float PA6_Duty = 0;
double ccr1_val1;
double ccr2_val2;
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
{
if(htim->Instance == TIM3)
{
if(htim->Channel==HAL_TIM_ACTIVE_CHANNEL_1)
{
ccr1_val1 = TIM3->CCR1;
ccr2_val2 = TIM3->CCR2;
TIM3->CNT = 0;
PA6_fra = 80000000 / 80 / (ccr1_val1 + 1);
PA6_Duty = (ccr2_val2 / ccr1_val1) * 100;
}
}
}
十三、EEPROM
1.iic移植
将官方提供的资源包的iic代码copy到我们的工程,并添加.c文件,并修改.c文件的错误的包含头文件。
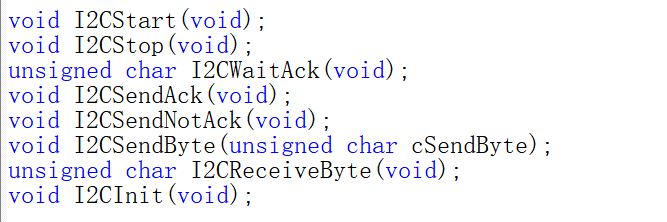
可以看到官方提供的代码
I2CStart:iic启始信号I2CStop:iic停止信号I2CWaitAck:iic等待应答I2CSendAck:iic确认应答I2CSendNotAck:iic非确认应答I2CSendByte:发送一字节I2CReceiveByte:接受一字节I2CInit:iic初始化函数
2.写EEPORM
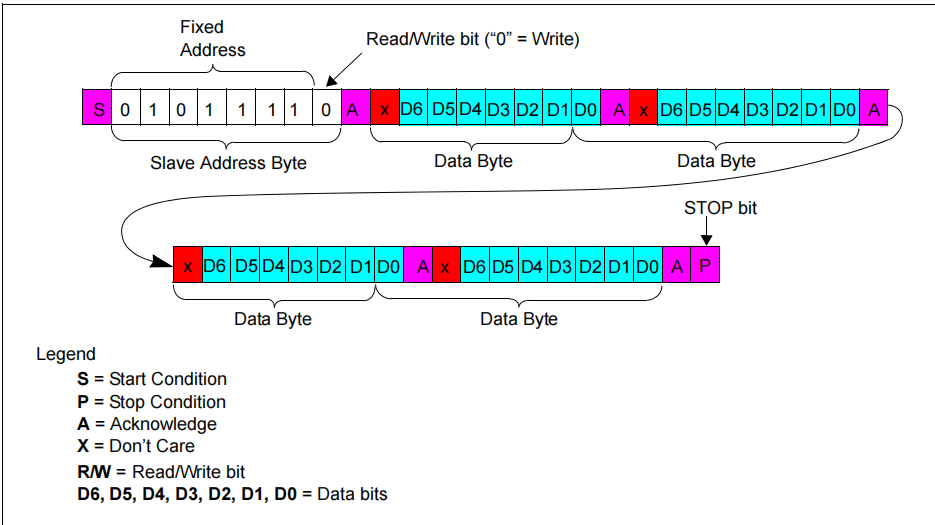
我们可以查看官方提供的AT24C02手册和板卡的产品手册。
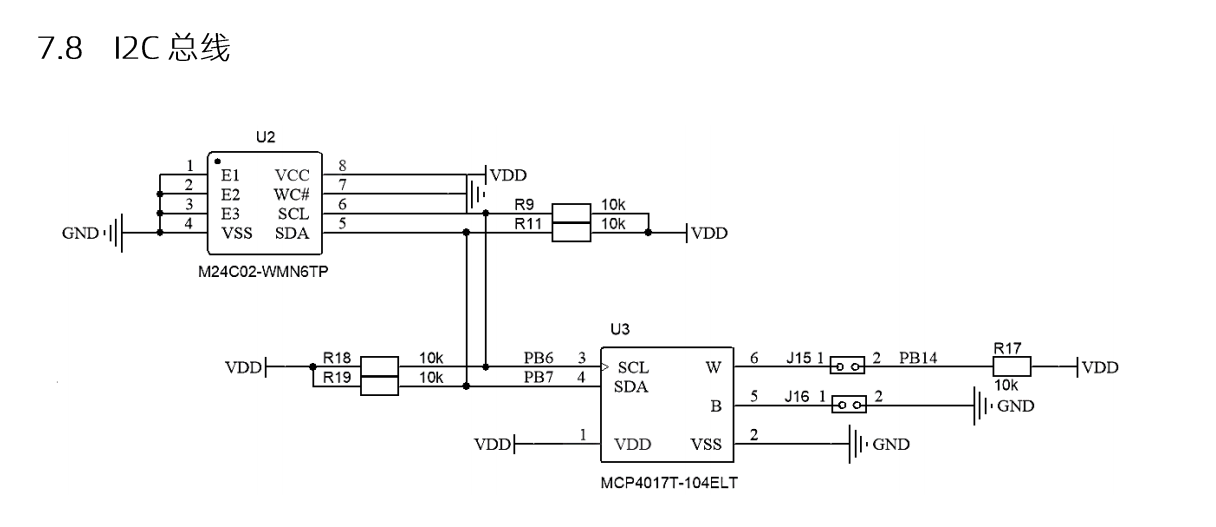
可以看到AT24C02的E1、E2、E3引脚都是接地。
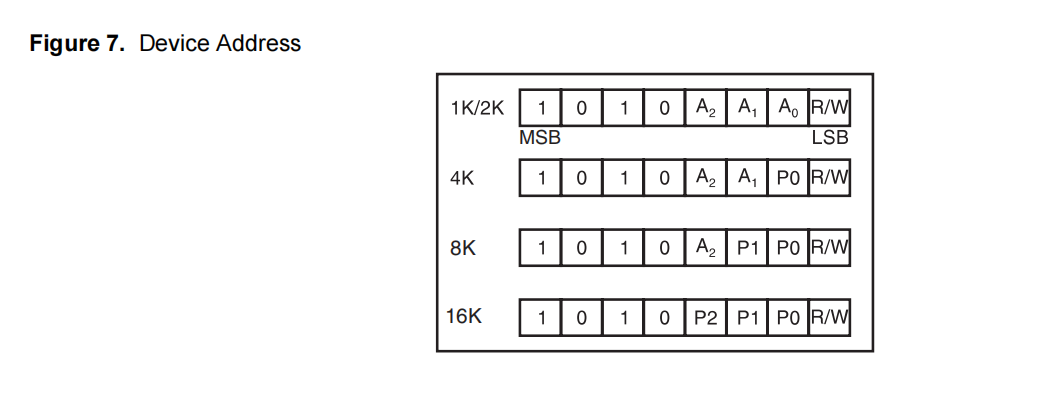
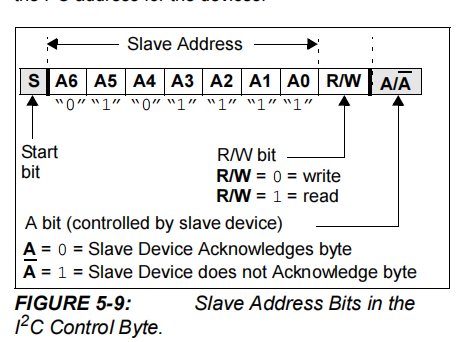
所以A2、A1、A0都是为0,而R/W位代表读写,0代表写,1代表读。
所以可以算出AT24C02的地址是10100000即0xA0
可以看到手册中有两种写方式,分别是写一个字节和写一页。这边的一页是8个字节,而且超过八个字节就覆盖(最多只能写一页)。
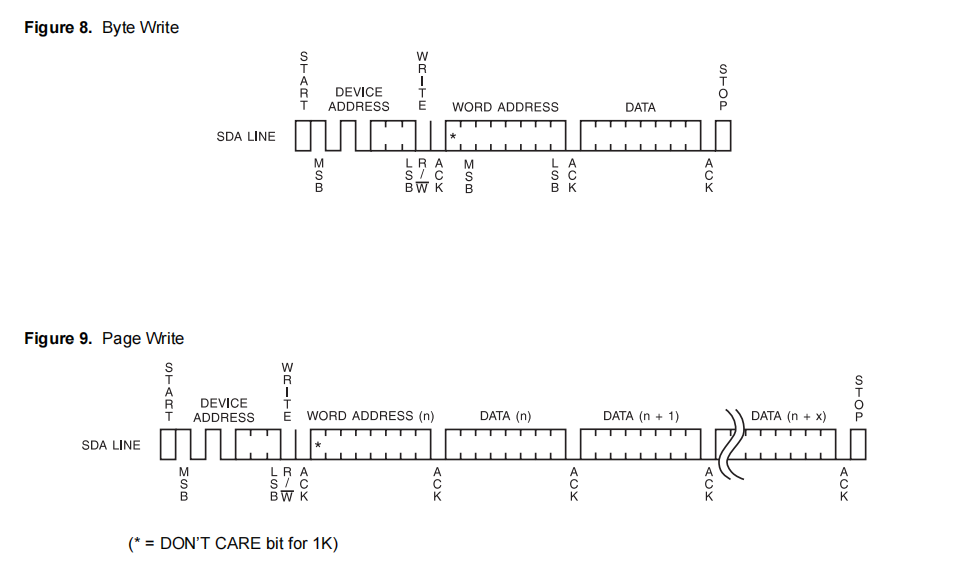
因为蓝桥储存的数据大概率是大于255的,所以我们采用第二种方式,储存四个字节。
根据图上所示,代码如下:
void save_eeprom(uint8_t addr,uint32_t data)
{
I2CStart();
I2CSendByte(0xA0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CSendByte((data>>24) & 0xFF);
I2CWaitAck();
I2CSendByte((data>>16) & 0xFF);
I2CWaitAck();
I2CSendByte((data>>8)&0xFF);
I2CWaitAck();
I2CSendByte(data& 0xFF);
I2CWaitAck();
I2CStop();
}
注:官方给的i2cinit是没有开启GPIOB的时钟,如果你的代码中没有用到GPIOB时钟,需要手动开启。
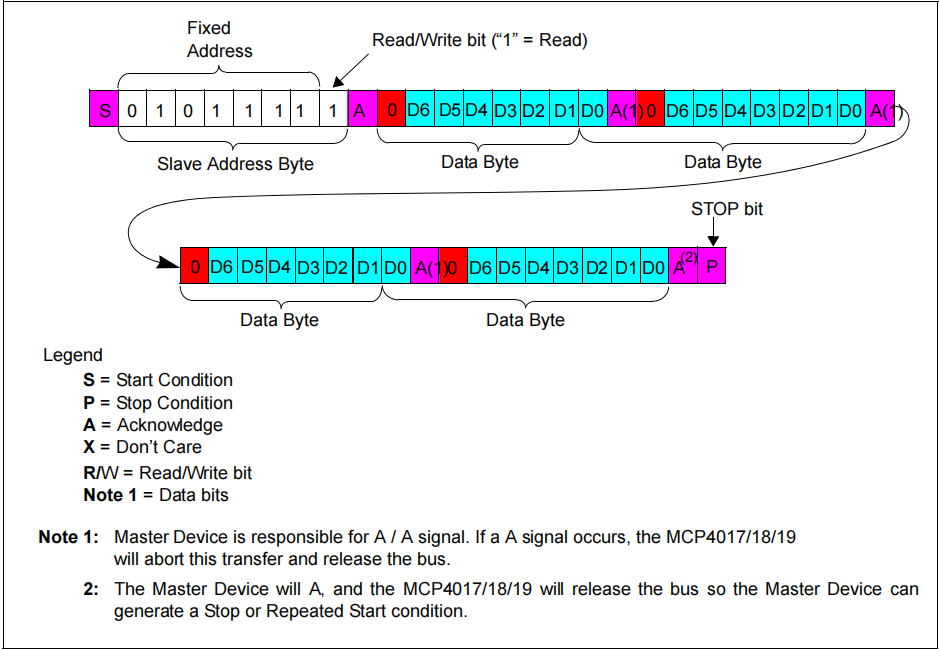
3.读EEPROM
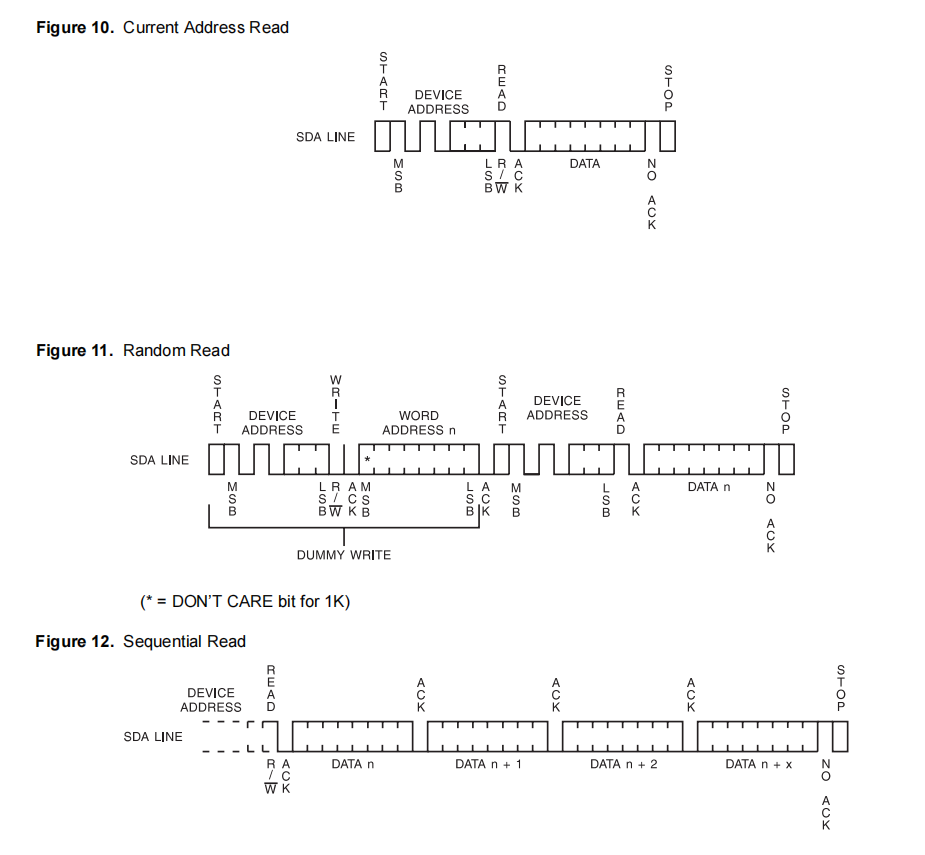
代码:
uint32_t read_eeprom(uint8_t addr)
{
uint32_t data = 0x00;
I2CStart();
I2CSendByte(0xA0);
I2CWaitAck();
I2CSendByte(addr);
I2CWaitAck();
I2CStart();
I2CSendByte(0xA1);
I2CWaitAck();
data = I2CReceiveByte();
I2CSendAck();
data = (data << 8)+ I2CReceiveByte();
I2CSendAck();
data = (data << 8)+ I2CReceiveByte();
I2CSendAck();
data = (data << 8)+ I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return data;
}
十四、RTC
1.CubeMX配置
配置RTC时钟源,选择旁路时钟源,也就是HSE。
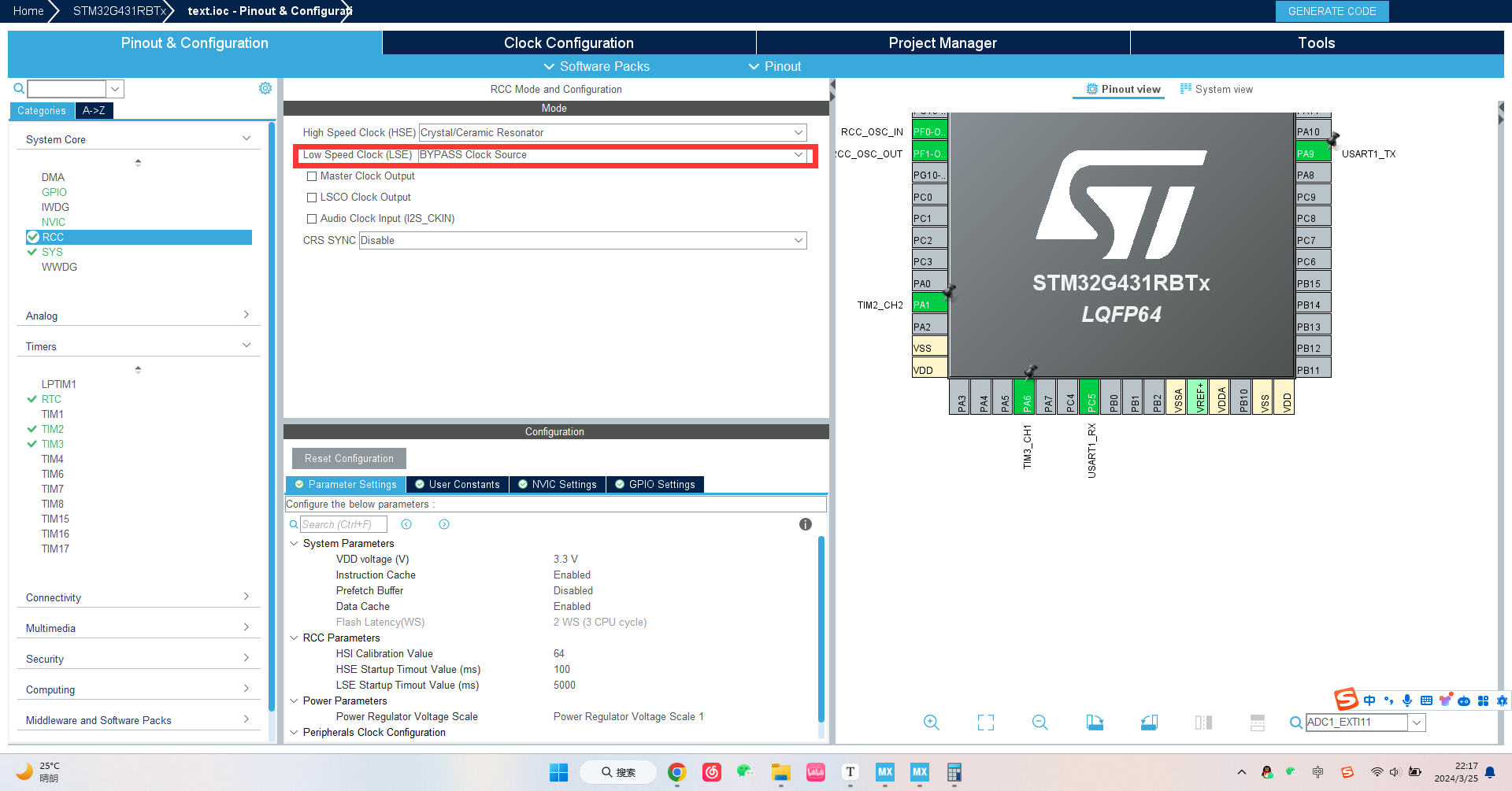
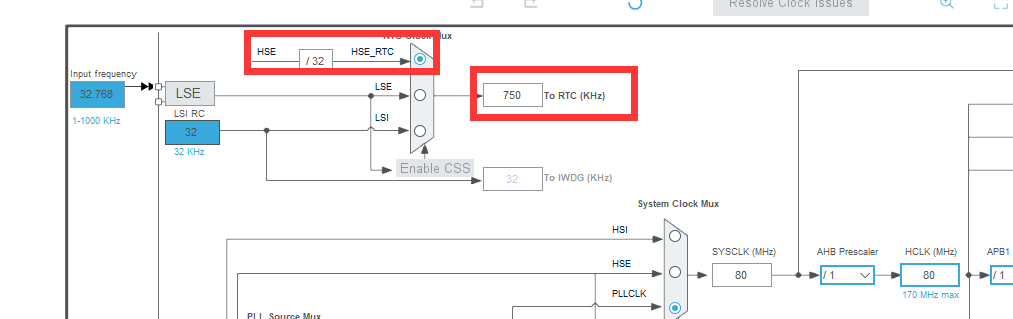
此时RTC的时钟频率是750KHZ。
使能RTC的时钟以及日期功能。
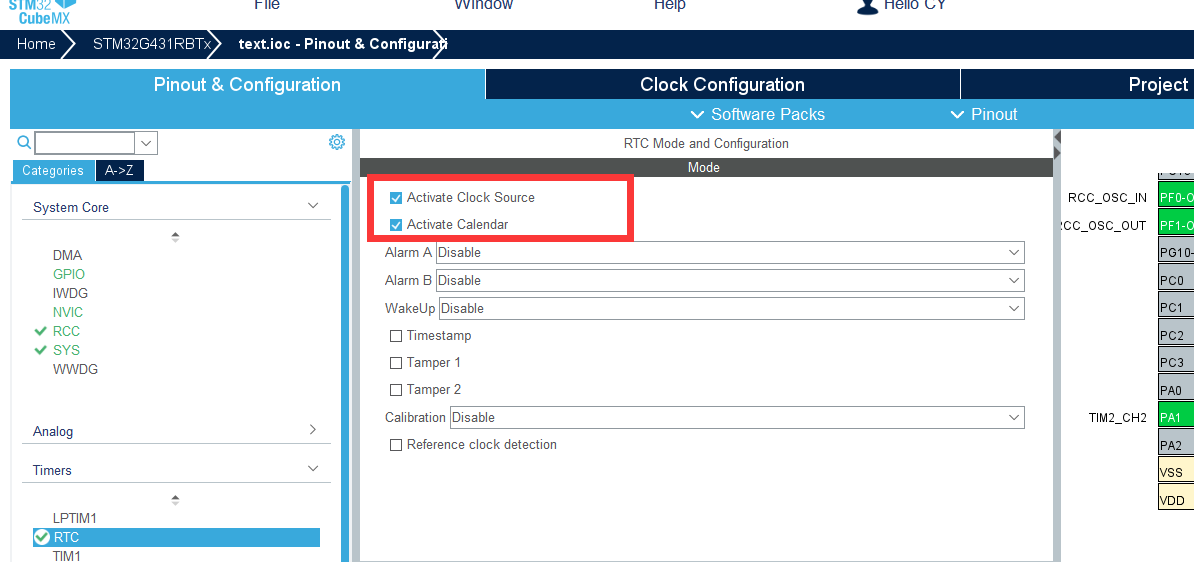

选择24小时制, Asynchronous Predivider value 为125-1, Synchronous Predivider value 为6000-1,因为750Khz/125/6000=1hz
设置时间格式为BCD,设置时间为23.55.55

设置日期为2024年3月25日

注:年份只填2024年的后两位。
RTC的闹钟功能,有两个闹钟,我们以A为例子
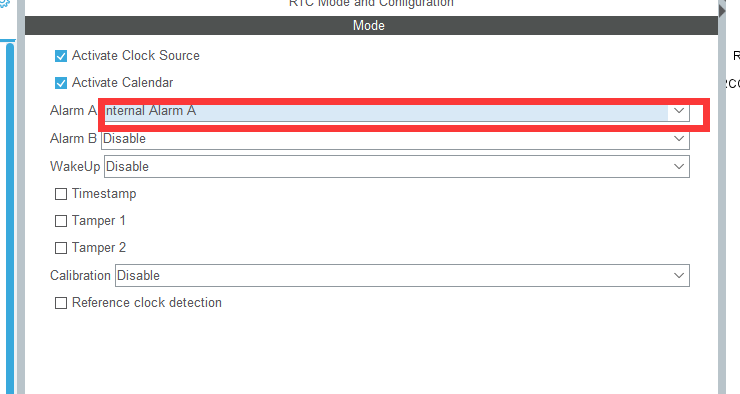
设置闹钟时间为每天的0.0.0,
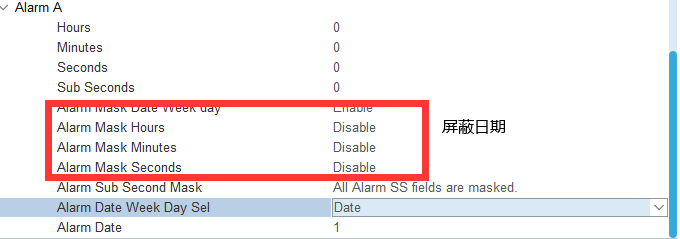
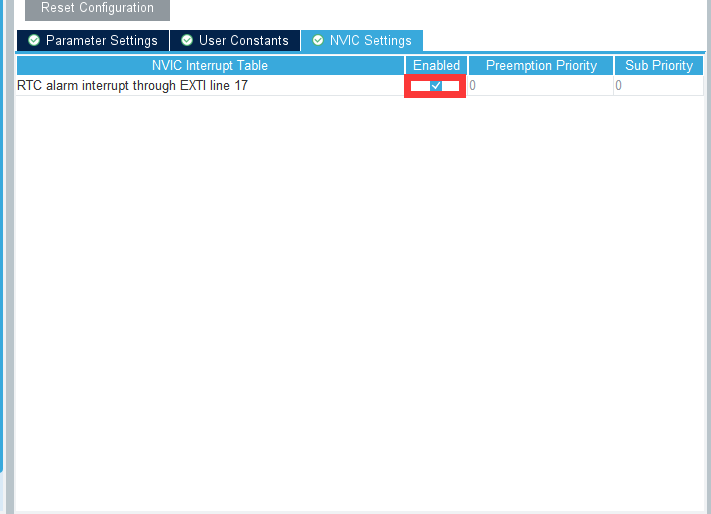
最后别忘记了,使能中断
RTC主要的函数有:
HAL_StatusTypeDef HAL_RTC_GetDate(RTC_HandleTypeDef *hrtc, RTC_DateTypeDef *sDate, uint32_t Format):得到日期HAL_StatusTypeDef HAL_RTC_GetTime(RTC_HandleTypeDef *hrtc, RTC_TimeTypeDef *sTime, uint32_t Format):得到时间HAL_StatusTypeDef HAL_RTC_SetDate(RTC_HandleTypeDef *hrtc, RTC_DateTypeDef *sDate, uint32_t Format):设置日期HAL_StatusTypeDef HAL_RTC_SetTime(RTC_HandleTypeDef *hrtc, RTC_TimeTypeDef *sTime, uint32_t Format):设置时间】void HAL_RTC_AlarmAEventCallback(RTC_HandleTypeDef *hrtc):闹钟A回调函数
注意:HAL_RTC_GetTime()和HAL_RTC_GetDate()必须同时使用。
2.获得时间
RTC_DateTypeDef sDate;
RTC_TimeTypeDef sTime;
HAL_RTC_GetTime(&hrtc,&sTime,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&sDate,RTC_FORMAT_BIN);
再次强调HAL_RTC_GetTime()和HAL_RTC_GetDate()必须同时使用。官方的解释是为了安全性,必须保证日期和时间的一致性。
3.设置时间
RTC_DateTypeDef sDate;
sDate.Year = xx;
sDate.Month = xx;
sDate.Date = xx;
HAL_RTC_SetDate(&hrtc,&sDate,RTC_FORMAT_BIN);
RTC_TimeTypeDef sTime;
sTime.Hours = xx;
sTime.Minutes = xx;
sTime.Seconds = xx;
sTime.StoreOperation = RTC_STOREOPERATION_RESET;
sTime.DayLightSaving = RTC_DAYLIGHTSAVING_NONE;
HAL_RTC_SetTime(&hrtc,&sTime,RTC_FORMAT_BIN);
这边建议用AC6的编译器,因为笔者遇到了很奇怪的bug,如果这边也有bug的可以交流一下。(bug:时间会超过24小时)
4.闹钟A回调函数
void HAL_RTC_AlarmAEventCallback(RTC_HandleTypeDef *hrtc)
{
//实现闹钟逻辑
...
}
void HAL_RTC_AlarmAEventCallback(RTC_HandleTypeDef *hrtc):闹钟A回调函数
注意:HAL_RTC_GetTime()和HAL_RTC_GetDate()必须同时使用。
2.获得时间
RTC_DateTypeDef sDate;
RTC_TimeTypeDef sTime;
HAL_RTC_GetTime(&hrtc,&sTime,RTC_FORMAT_BIN);
HAL_RTC_GetDate(&hrtc,&sDate,RTC_FORMAT_BIN);
再次强调HAL_RTC_GetTime()和HAL_RTC_GetDate()必须同时使用。官方的解释是为了安全性,必须保证日期和时间的一致性。
3.设置时间
RTC_DateTypeDef sDate;
sDate.Year = xx;
sDate.Month = xx;
sDate.Date = xx;
HAL_RTC_SetDate(&hrtc,&sDate,RTC_FORMAT_BIN);
RTC_TimeTypeDef sTime;
sTime.Hours = xx;
sTime.Minutes = xx;
sTime.Seconds = xx;
sTime.StoreOperation = RTC_STOREOPERATION_RESET;
sTime.DayLightSaving = RTC_DAYLIGHTSAVING_NONE;
HAL_RTC_SetTime(&hrtc,&sTime,RTC_FORMAT_BIN);
这边建议用AC6的编译器,因为笔者遇到了很奇怪的bug,如果这边也有bug的可以交流一下。(bug:时间会超过24小时)
4.闹钟A回调函数
void HAL_RTC_AlarmAEventCallback(RTC_HandleTypeDef *hrtc)
{
//实现闹钟逻辑
...
}
十五、DMA+ADC
1.CubeMX配置
这边以PA4和PA5为例子。
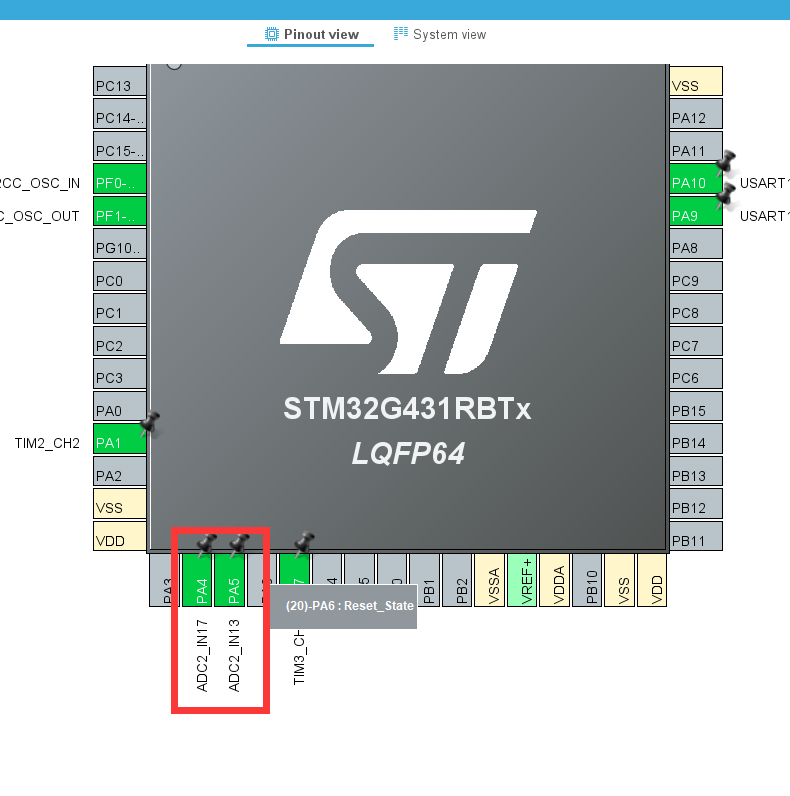
然后把IN13改为 Single-ended。
接下来只需要,配置下面的选项。
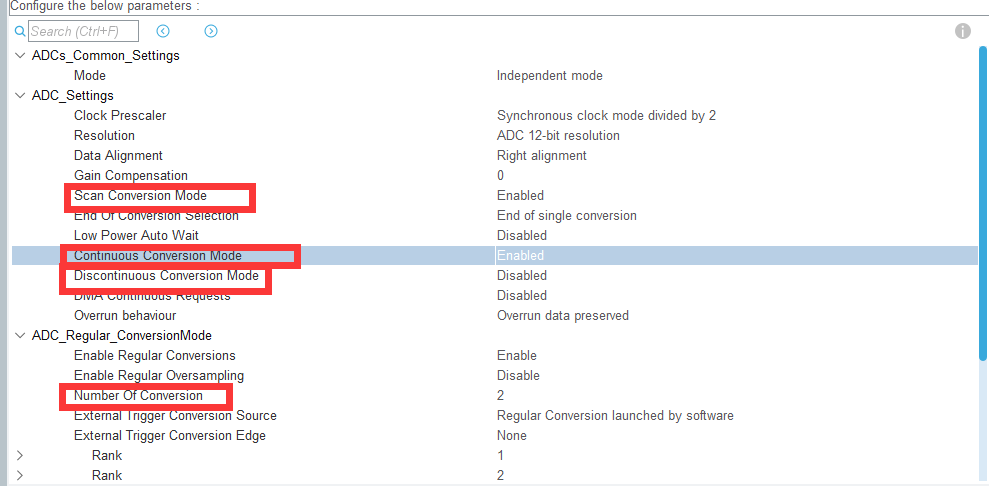
Scan Conversion Mode: 连续转换模式Continuous Conersion Mode:连续转换Discontinuous Conversion Mode:不连续转换Number Of Conversion:通道数
只需要把Scan Conversion Mode 使能,然后把通道数改为对应的通道,其他两个选项就会默认对应,且不能修改。
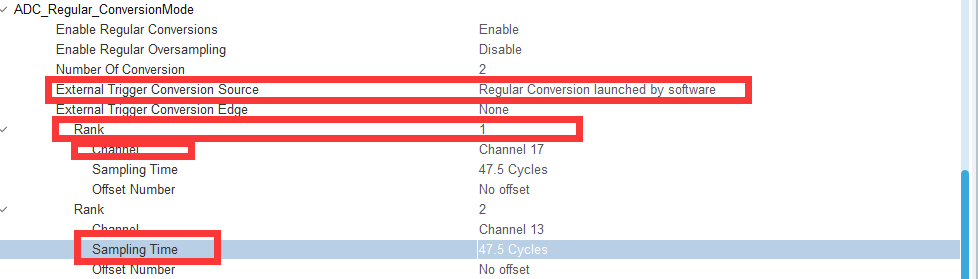
External Trigger Conbersion Souece:触发方式,这边选择软件触发。Rank:第一个转换什么通道Channel:选择要转换的通道Sampling Time:转换的时间,越高越准确
开启DMA
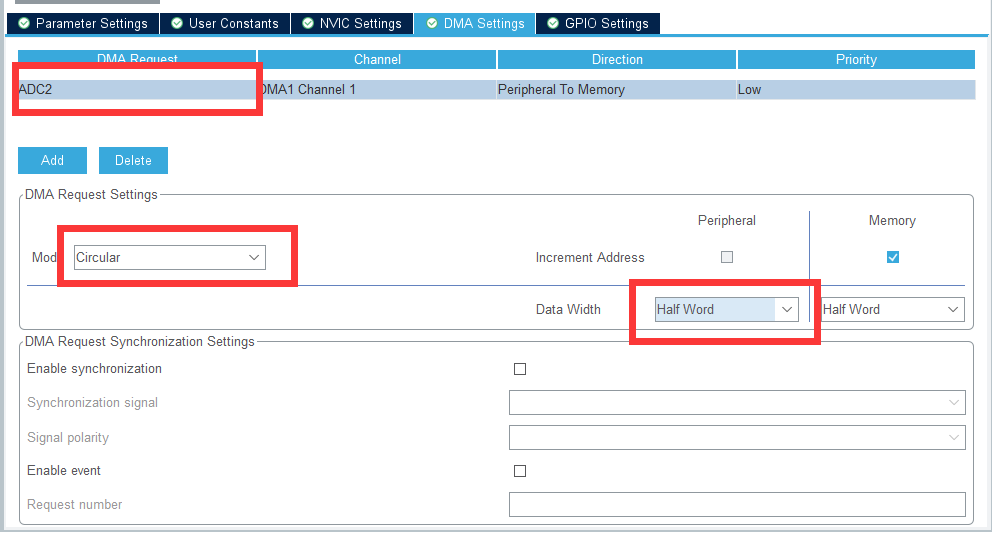
Mode:选择Circular- 外设读取的字节选择4字节
2.代码编写
先进行ADC校准
HAL_ADCEx_Calibration_Start(&hadc2,ADC_SINGLE_ENDED);
读取ADC的值
uint16_t adc_val[4];
HAL_ADC_Start_DMA(&hadc2,(uint32_t*)adc_val,4);
//可以读多次取平均
十六、DAC
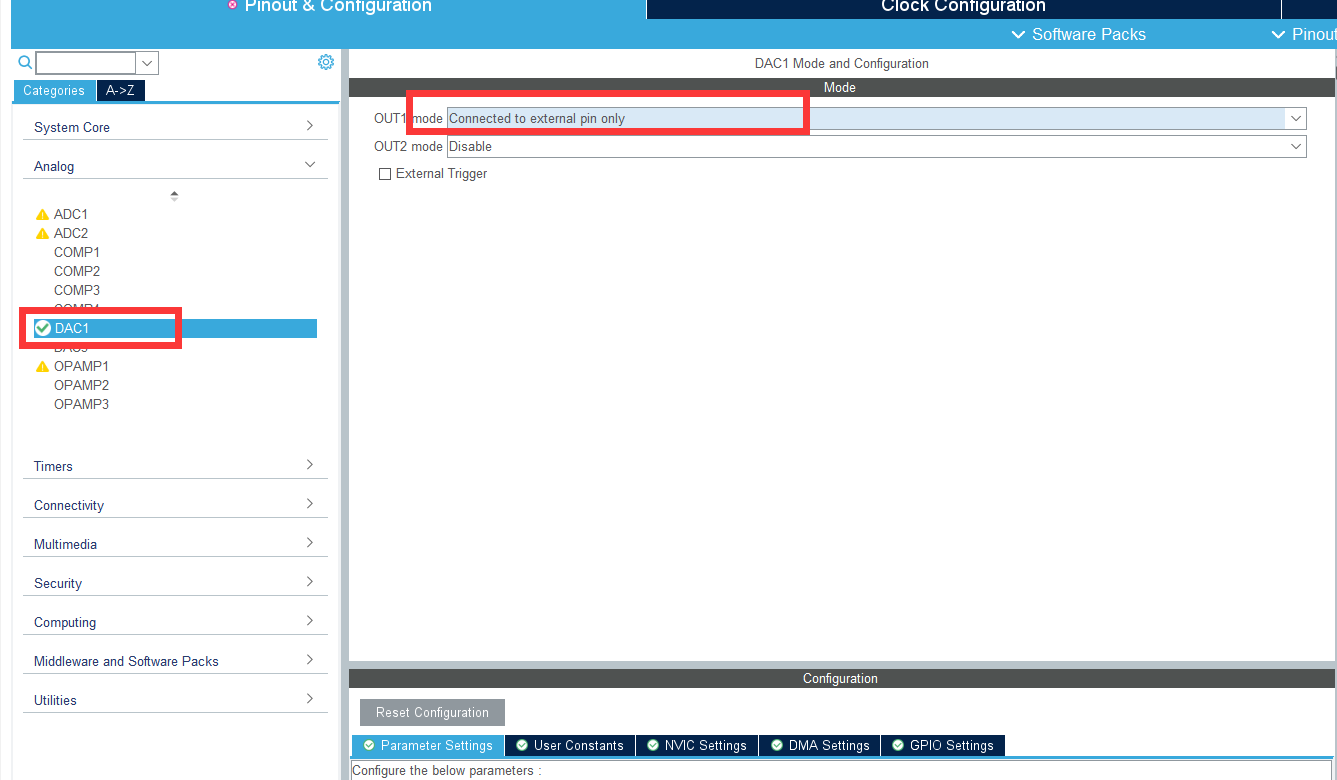
1.CubeMX 配置
DAC的CubemX配置很简单,只需要开启输出
2.代码编写
HAL_DAC_SetValue(&hdac1, DAC_CHANNEL_1, DAC_ALIGN_12B_R, 4095); //设置发生的电压
HAL_DAC_Start(&hdac1,DAC_CHANNEL_1); //开启DAC1
十七、MCP4017
1.MCP4017介绍
根据手册我们可以得知MCP4017的地址为5E
蓝桥嵌入式开发板采用的是MCP4017-104RLT
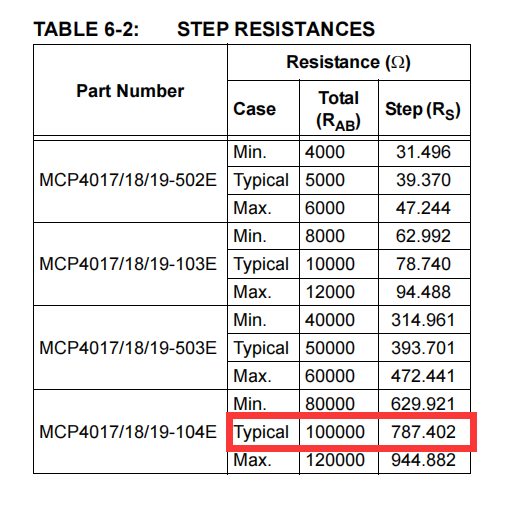
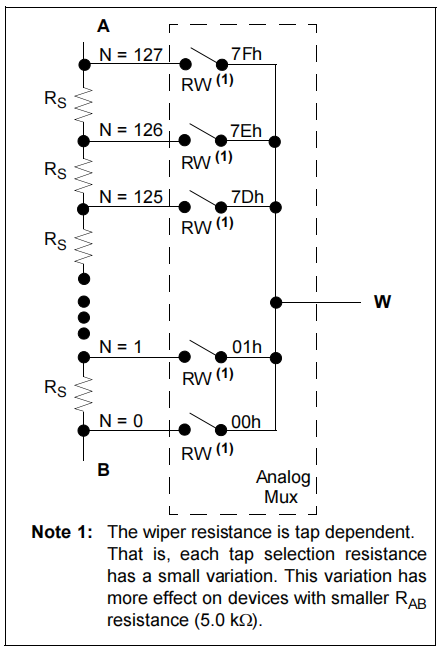
可以看到最大电压为100K,且步进为787.402,因为可以分成127份,所以100000 / 127 = 787.402
2.代码编写
写操作
void MCP_Write(char byts)
{
I2CStart();
I2CSendByte(0x5E);
I2CWaitAck();
I2CSendByte(byts);
I2CWaitAck();
I2CStop();
}
读操作
char MCP_Read(void)
{
char byts;
I2CStart();
I2CSendByte(0x5F);
I2CWaitAck();
byts = I2CReceiveByte();
I2CSendNotAck();
I2CStop();
return byts;
}
作者的实力有限,如果有问题,欢迎指正批评,也可以加QQ一起讨论,QQ:2805686936















 1274
1274

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









