






RRT 3D, RRT星 3D 路径规划算法,机器人路径规划导航RRTstar,有算法matlab源文件,可直接运行并且有中文注释,适合初学者学习入门。
算法,matlab源代码学习。
ID:6758672457876619
NWYR
RRT 3D,RRT星 3D 路径规划算法,机器人路径规划导航RRTstar,有算法matlab源文件,可直接运行并且有中文注释,适合初学者学习入门。
随着机器人技术的不断发展,机器人路径规划逐渐成为一个备受关注的研究领域。而在这个研究领域中,RRT 3D以及RRT星 3D 算法作为一种高效且简单的路径规划方法,近年来备受研究者和工程师的青睐。本文将详细介绍RRT 3D和RRT星 3D 路径规划算法的原理以及其在机器人路径规划导航中的应用,同时提供算法的matlab源文件,方便初学者进行学习和实践。
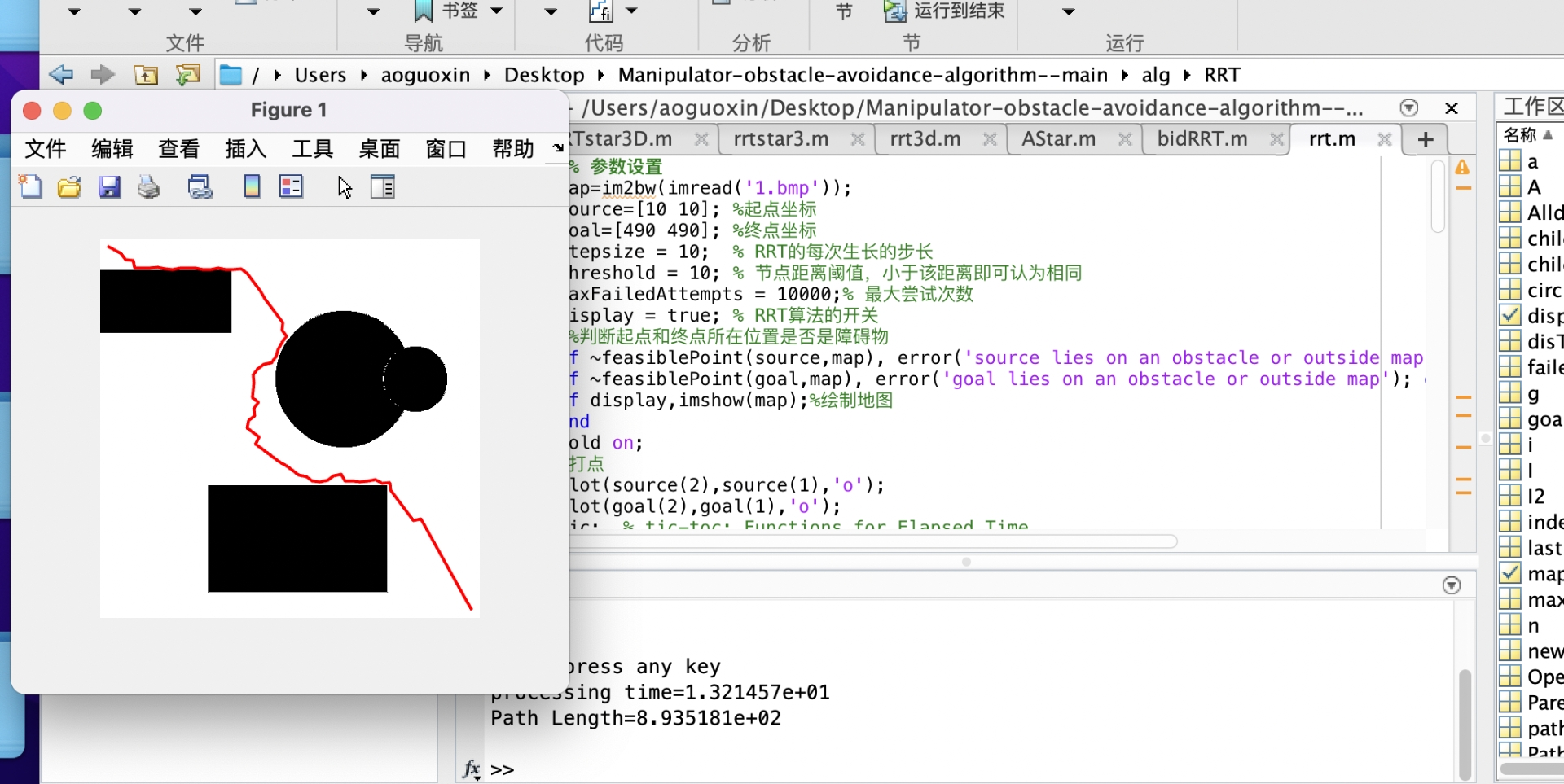
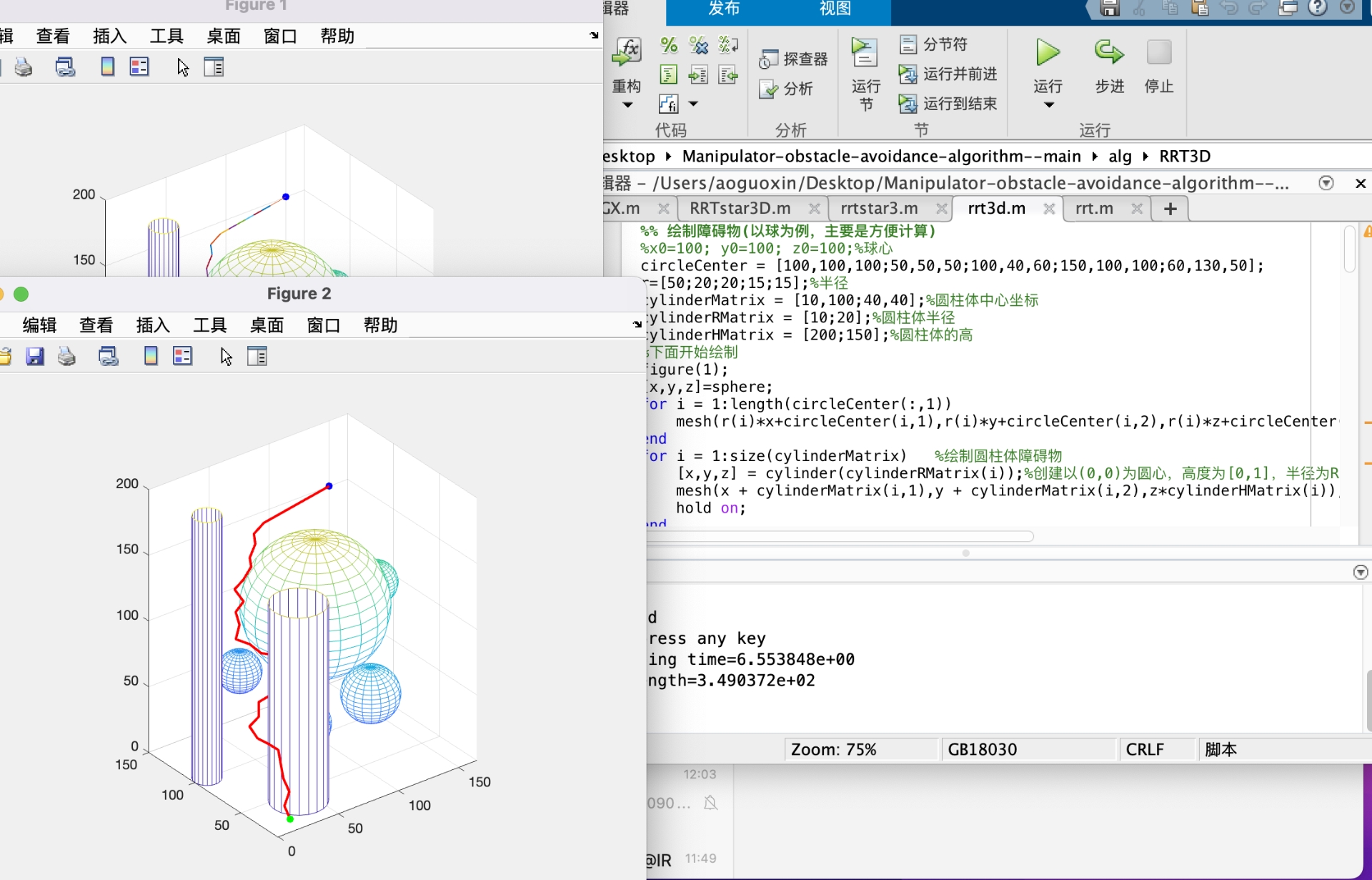
路径规划是指机器人或自主系统确定一条从起点到目标点的最佳路径的过程。在三维空间中,路径规划变得更加复杂,因为机器人需要考虑避开障碍物、避免碰撞以及其他运动限制。RRT(Rapidly-exploring Random Tree)3D算法是一种基于树结构的路径规划算法,它通过随机生成和扩展树节点来搜索路径。
RRT 3D算法的基本原理是通过生成一系列随机节点,并将每个节点与最近的树节点连接起来,形成一棵树。通过不断生成和连接节点,树会逐渐扩展并覆盖整个搜索空间。算法在每次迭代中都会随机生成一个节点,并将其与最近的树节点连接起来。在连接的过程中,算法会检查节点与树节点之间是否存在碰撞,如果存在碰撞,则舍弃该连接,重新选择新的节点。整个过程将不断重复,直到找到一条连接起始点和目标点的路径。
与传统的路径规划算法相比,RRT 3D算法具有一定的优势。首先,它能够在高维空间中进行路径规划,可以应对复杂的环境和障碍物。其次,该算法无需对环境进行事先的建模和规划,只需通过不断随机生成节点探索搜索空间,因此具有较低的计算复杂度。此外,RRT 3D算法还具有良好的可扩展性和适应性,可以应用于各种不同类型的机器人和导航场景。
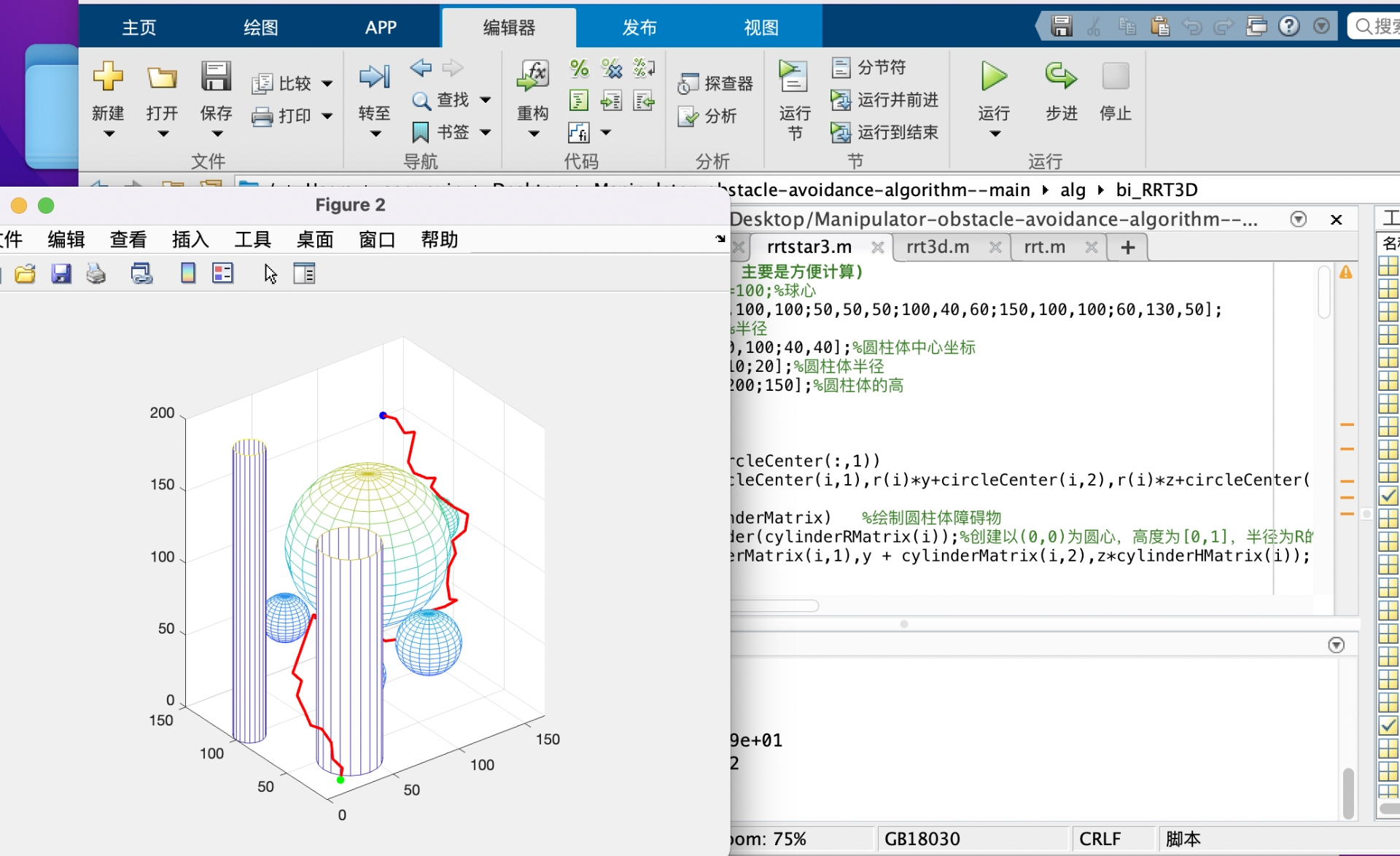
RRT星 3D算法是对RRT 3D算法的改进和扩展。在RRT星 3D算法中,通过引入一种启发式评估函数,将更多的节点生成和扩展集中在目标附近的区域,从而提高了路径搜索的效率和准确性。该算法通过评估节点与目标点的距离和周围节点的密度来选择生成新节点的位置,从而使得搜索更加集中和高效。此外,RRT星 3D算法在生成节点的过程中还会进行优化,尽量选择能够形成直线路径的节点,进一步提高路径的质量和效果。
为了方便初学者学习和理解RRT 3D和RRT星 3D算法的使用,我们提供了算法的matlab源文件,并添加了中文注释。这些源文件可以直接在matlab中运行,并给出了详细的步骤说明和解释。通过运行这些源文件,初学者可以逐步了解和掌握RRT 3D和RRT星 3D算法的使用方法,并结合实际案例进行实践。
总之,RRT 3D和RRT星 3D算法是一种高效且简单的路径规划方法,适用于机器人路径规划导航。通过不断生成和连接节点,这些算法能够搜索到起点和目标点之间的最佳路径。本文详细介绍了算法的原理和特点,并提供了算法的matlab源文件,方便初学者进行学习和实践。希望这篇文章对初学者们在机器人路径规划方面的学习和研究有所帮助。
相关的代码,程序地址如下:http://wekup.cn/672457876619.html
















 1369
1369

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









