







【GiantPandaCV导语】本文介绍的是Efficient Neural Architecture Search方法,主要是为了解决之前NAS中无法完成权重重用的问题,首次提出了参数共享Parameter Sharing的方法来训练网络,要比原先标准的NAS方法降低了1000倍的计算代价。从一个大的计算图中挑选出最优的子图就是ENAS的核心思想,而子图之间都是共享权重的。
1. 摘要
ENAS是一个快速、代价低的自动网络设计方法。在ENAS中,控制器controller通过在大的计算图中搜索挑选一个最优的子图来得到网络结构。
- controller使用Policy Gradient算法进行训练,通过最大化验证集上的期望准确率作为奖励reward。
- 被挑选的子图将使用经典的CrossEntropy Loss进行训练。
子网络之间的权重共享可以让ENAS性能更强大的性能,同时要比经典的NAS方法降低了约1000倍的计算代价。
2. 简介
NAS-RL使用了450个GPU训练了3-4天,花费了32,400-43,200个GPU hours才可以训练出一个合适的网络,需要大量的计算资源。NAS的计算瓶颈就在于需要让每个子模型从头开始收敛,训练完成后就废弃掉其训练好的权重。
本文主要贡献是通过让所有子模型共享权重、避免从头开始训练,从而有效提升了NAS的训练效率。随后的子模型可以通过迁移学习的方法加速收敛速度、从而加速训练。
ENAS可以做到使用单个NVIDIA GTX 1080Ti显卡,只需要花费16个小时。同时在CIFAR10上可以达到2.89%的test error。
3. 方法
3.1 一个例子
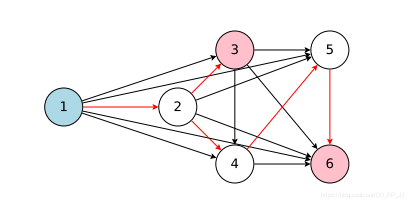
ENAS可以看作是从一个超网中得到一个自网络,如下图所示。6个节点相互连接得到的就是超网(是一个有向无环图),通过controller得到红色的路径就是其中的一个子网络。
举一个具体的例子,假设当前有4个节点:
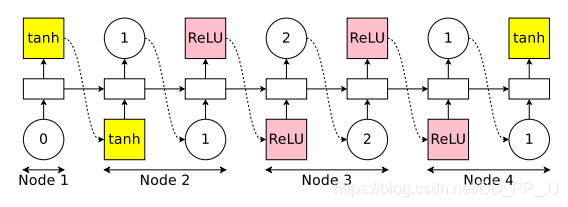
上图是controller,具体实现是一个LSTM,需要做出以下决策:
- 激活哪个边
- 对应Node选择什么操作
第一个Node,controller首先采样一个激活函数,这里采用的是tanh,然后这个激活会接收x和h作为输入。
第二个Node,先采样上一个index=1,说明Node2应该和Node1相连接;然后再采样一个激活函数relu。
第三个Node,先采样上一个index=2,说明Node3应该和Node2相连接;然后采样一个激活函数Relu。
第四个Node,先采样上一个index=1,说明Node4应该和Node1相连接,然后采样一个激活函数tanh。
结束后发现有两个节点是loose end, ENAS的做法是将两者结果做一个平均,得到最终输出。

在上述例子中,假设节点数量为N,一共使用了4个激活函数可选。搜索空间大小为: 4 N × N ! 4^N\times N! 4N×N!
其中 4 N 4^N 4N代表N个节点可选的4个激活函数组成的空间, N ! N! N! 代表节点的连接情况,之所以是阶乘也很容易理解,因为随后的Node只能连接之前出现过的Node。
3.2 ENAS训练流程
在ENAS中,有两组可学习参数,Controller LSTM中的参数 θ \theta θ 和 子模型共享的权重参数 w w w。具体流程是:
- LSTM sample出一个子模型,然后训练模型 w w w, 通过标准的反向传播算法进行训练,训练完成以后在验证集上进行测试。
- 通过验证集上结果反馈给LSTM,计算 θ \theta θ的梯度,更新LSTM的参数。
- 如此反复,可以训练出一个LSTM能够让模型在验证集上的性能最佳。
第一步:训练共享参数w
首先固定住controller的参数,然后使用蒙特卡洛估计来计算梯度,更新w权重:

m是从 π ( m ; θ ) \pi(m;\theta) π(m;θ) 中采样得到的模型,对于所有的模型计算模型损失函数的期望。右侧公式是梯度的无偏估计。
第二步:训练controller 参数 θ \theta θ
这一步固定住w,更新controller参数,希望可以得到的Reward值(也就是验证集准确率)尽可能大。

这里使用的是REINFORCE算法来进行计算的,具体内容可以查看NAS-RL那篇文章中的讲解。
3.3 marco search space
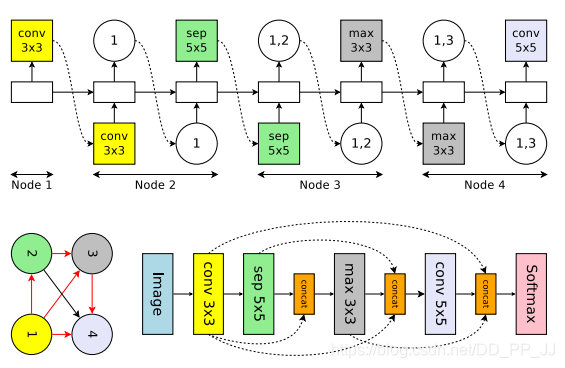
有了上边的例子做铺垫,卷积的这部分就很好理解了,区别有几点:
- 节点操作不同,这里可以是3x3卷积、5x5卷积、平均池化、3x3最大池化、3x3深度可分离卷积,5x5深度可分离卷积 一共六个操作。
- 上图Node3输出了两个值,代表先将node1和node2的输出tensor合并,然后在经过maxpool操作。
计算卷积网络设计的空间复杂度,对于第k个节点,顶多可以选取k-1个层,所以在第k层就有 2 k − 1 2^{k-1} 2k−1种选择,而这里假设一共有L个层需要做从6个候选操作中做选择。那么在不考虑连线的情况下就有 6 L 6^L
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











