






自动驾驶换道决策与控制实车测试算法。
基于视觉传感器获得场景信息,构建两车道驾驶态势图。
红绿灯检测停车,及动态目标车速跟随算法。
together future~
ID:893000670855719762
自动驾驶创新工坊


自动驾驶车辆是当今科技领域的热点之一,其核心目标是实现智能化的车辆控制和决策,提升行驶安全性和效率。本文将基于视觉传感器获取的场景信息,研究自动驾驶车辆的换道决策与控制算法,并通过实车测试验证算法的可行性和稳定性。
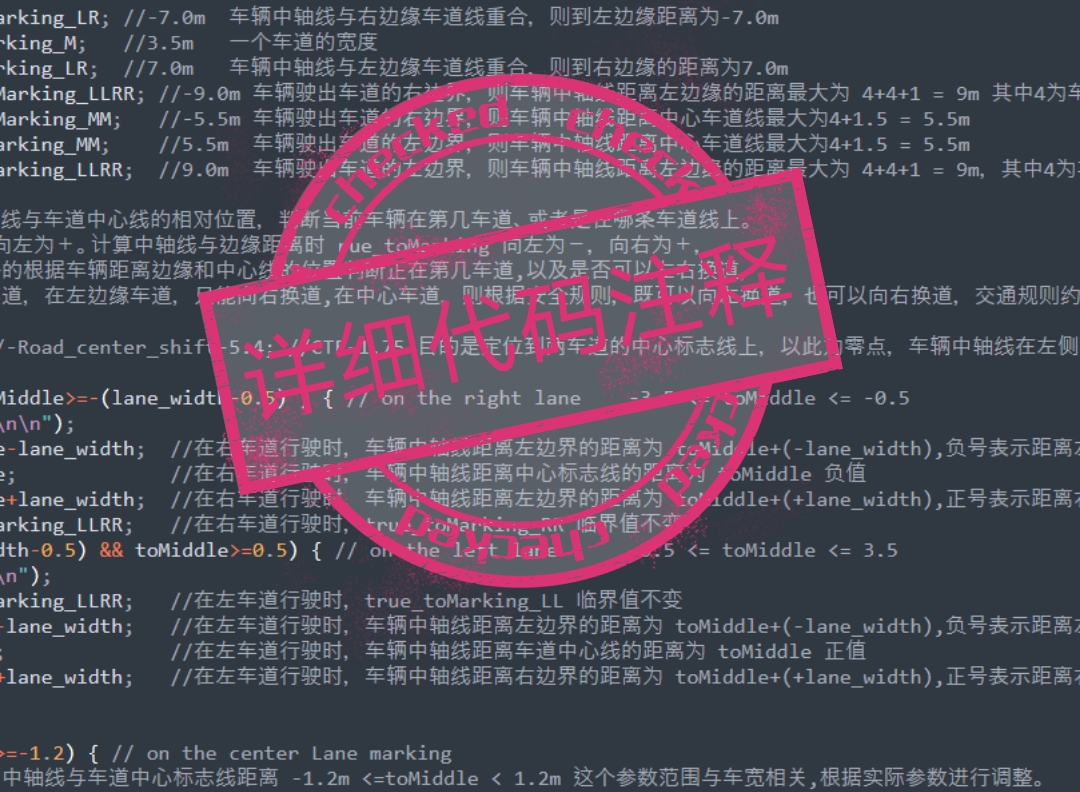
在自动驾驶中,换道决策与控制是关键的技术之一。换道决策不仅需要考虑当前车辆的行驶状态,还需要预测其他车辆的行驶意图,以确保换道操作的安全性和顺利性。为了实现自动换道,我们首先需要构建两车道的驾驶态势图。通过视觉传感器采集的场景信息,我们可以识别道路标线、车辆等关键元素,并将其绘制在驾驶态势图上。通过对驾驶态势图的分析和处理,我们可以获取当前车辆所处的位置、速度、加速度等信息,为换道决策提供依据。
换道决策的另一个重要因素是红绿灯检测停车算法。在实际的驾驶过程中,红绿灯是车辆行驶的重要参考标志,也是交通安全的重要保障。通过视觉传感器对红绿灯进行检测,我们可以判断当前是否需要停车。通过分析红绿灯的信号状态和倒计时时间,我们可以决定是否停车,并控制车辆的速度和刹车操作。此外,为了保证车辆与前方目标车辆的安全跟随,我们还需要设计动态目标车速跟随算法。通过对前方目标车辆的跟踪和分析,我们可以根据目标车辆的速度和加速度信息,调整自动驾驶车辆的速度和加速度,以保持与目标车辆的安全距离。
本文通过实车测试验证了自动驾驶换道决策与控制算法的可靠性和稳定性。实车测试是自动驾驶研究中不可或缺的一环,通过真实道路环境中的实际测试,可以评估算法在复杂场景下的性能。我们选择了不同类型的道路和不同交通状况进行实车测试,并记录了测试过程中的关键数据和结果。通过对这些数据和结果的分析,我们可以评估算法在实际驾驶中的表现,发现潜在问题并进行优化。
通过本文的研究,我们对自动驾驶换道决策与控制算法进行了深入的分析和研究。基于视觉传感器获得的场景信息,我们构建了两车道的驾驶态势图,并研究了红绿灯检测停车和动态目标车速跟随算法。通过实车测试的验证,我们验证了算法的可行性和稳定性。未来,随着自动驾驶技术的发展,我们相信这些算法将逐渐成熟,并为实现安全、高效的自动驾驶提供有力的支持。
together future~
相关的代码,程序地址如下:http://wekup.cn/670855719762.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









