






目录
5.3 电脑端辅助校准(BETAFPV Configurator)
前言:Betaflight Configurator是一个用于配置和调校无人机飞控系统的工具,在无人机爱好者中很常用。它是一个跨平台的配置工具,适用于各种类型的无人机,包括四旋翼、六旋翼等。我看到了很多相关信息,所以在此想整理出一个比较全面的教程。
第一章:软件安装与连接
1.1 下载与安装
官网下载地址:GitHub发布页(支持Windows/macOS/Linux)。
1.2 连接飞控
使用USB线连接飞控与电脑,飞控通电后红灯或绿灯渐变闪烁表示识别成功。
打开软件 → 右上角选择对应串口(COM)→ 点击Connect。

图 1 软件欢迎界面
第二章:基础配置
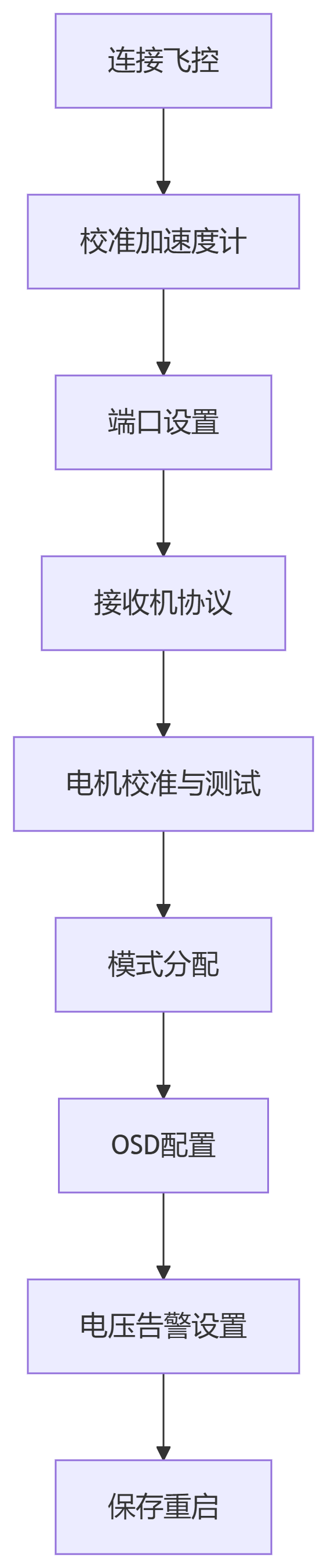
图 2 基础配置流程图
2.1 连接飞控与软件
-
硬件连接
-
使用USB线连接飞控与电脑,飞控通电后红灯/绿灯渐变闪烁表示识别成功。
-
打开软件 → 右上角选择对应串口号(如
COM3或/dev/ttyACM0)→ 点击Connect。
-
-
驱动问题处理
-
Windows若未识别:使用Zadig工具安装
STM32 Virtual COM Port驱动。 -
Linux需执行:
sudo usermod -aG dialout $USER后重启。
-
2.2 基础参数配置(Configuration标签页)
1. 飞控方向校准(Setup标签页)
点击Calibrate Accelerometer → 按提示放置飞控水平 → 完成校准后查看3D模型是否随物理移动同步。
2. 端口设置(Ports标签页)
接收机:启用对应UART的“Serial RX”(例:ELRS接收机需开启UART1的串行接收)。
图传/OSD:启用MSP显示输出的UART(通常与图传模块共用)。
GPS:若使用GPS,启用对应UART的“GPS”和“Telemetry”。
3. 接收机协议(Configuration → Receiver)
协议类型:
ELRS选CRSF,SBUS选SERIAL_BASED(如FrSky),SPI接收机选SPI_RX36。
通道映射:
打杆检查通道顺序(默认AETR:油门AIL升降ELE方向RUD)。若通道反向:在遥控器设置中调整或勾选软件内的REVERSE选项1。
4. 电机设置(Motors标签页)
!!必须拆桨!!
电调校准:
开启I understand the risks → 拖动主滑块至100%。
插电池 → 听到“滴滴”提示音后立即拉回0% → 完成校准。
电机转向测试:
拖动单个电机滑块(如Motor 1至25%)→ 观察转向是否与图示一致(CCW逆时针/CW顺时针)。
转向错误:交换电调信号线或通过BLHeli软件调整。
5. 模式设置(Modes标签页)
必备模式分配:
| 模式 | 作用 | 推荐开关通道 |
|---|---|---|
|
| 解锁电机 | AUX1(拨动开关) |
|
| 自稳模式(新手必用) | AUX2 |
|
| 寻机蜂鸣器 | AUX3 |
高级模式:
AIR MODE(常与ACRO联动):低油门保持姿态控制。
TURTLE(反乌龟模式):倒置后翻转恢复。
6. OSD叠加信息(Onscreen Display标签页)
拖拽元素到预览画面:核心项包括电压、飞行模式、计时器、RSSI信号。
点击Save应用 → 断开USB后重新通电生效。
7. 电池与电压告警(Power & Battery标签页)
电压检测:
设置Battery Voltage为实际电池S数(如4S填4)。
校准电压:插电池后点击Read → 对比万用表数值调整偏移量。
告警阈值:
建议设置:Warning Voltage = 3.5V/单体,Critical Voltage = 3.2V/单体。
2.3 保存与重启
每次修改后:点击右下角Save and Reboot(保存并重启飞控)。
配置备份:
在Presets标签页点击Save to File导出.diff文件,避免设置丢失。
2.4 基础调参安全要点
-
首次通电顺序:USB连接 → 软件配置 → 断开USB → 插电池 → 再通电测试。
-
解锁保护:确保
ARM模式开关逻辑正确(推杆解锁为高风险,推荐用拨动开关)。 -
电机异常处理:
-
电机不转:检查电调校准、飞控供电、信号线焊接。
-
单个电机停转:排查电机线虚焊或电调故障。
-
第三章:接收机与模式设置
3.1 接收机设置(确保遥控信号正常输入)
1. 硬件连接与端口启用
接线确认:接收机需正确连接飞控的UART端口(5V、GND、信号线三根)。
端口启用:
进入Ports标签页 → 找到接收机连接的UART(如UART2)→ 开启Serial RX开关。
注意:每个UART只能启用一种功能,避免与图传或GPS冲突。
2. 协议选择与通道映射
协议类型(Configuration → Receiver):
| 接收机类型 | 协议选择 | 说明 |
|---|---|---|
| ELRS/TBS Crossfire |
| 高速双向通信 |
| FrSky SBUS |
| 需关闭Telemetry选项 |
| Spektrum卫星 |
| 需CLI绑定 |
通道顺序校准:
默认映射为AETR1234(AIL副翼、ELE升降、THR油门、RUD方向)。
打杆检查:移动摇杆时,软件通道滑块应在1000~2000范围内变化,中立点接近1500。若顺序错误,在Receiver页面修改映射(例:TAER改为AETR)。
3. 遥控器端点与死区校准
油门最低值:确保油门最低位≤1000(若高于1000,飞控会禁止解锁)。
中立点死区:
观察摇杆回中时的波动范围(例:1497~1503)→ 计算死区值:(波动最大值-最小值)/2 ≈ 3 → 填入Deadband字段。
微调方法:
在遥控器设置中调整通道的Endpoint(终点)和Subtrim(微调)使数值达标后点击Save。

图 3 微调方法步骤图
3.2 模式设置(定义飞行行为与功能开关)
1. 核心模式分配(Modes标签页)
必选模式:
| 模式 | 作用 | 推荐开关类型 |
|---|---|---|
|
| 电机解锁/锁定 | 拨杆开关(如AUX1) |
|
| 自稳模式(新手必备) | 三段开关(如AUX2) |
|
| 混合模式(自稳+特技) | 与ANGLE共用开关 |
|
| 手动模式(无自动修正) | 三段开关高位 |
实用功能模式:
BEEPER(寻机蜂鸣器):紧急定位飞机。
TURTLE(反乌龟):倒置后反转电机实现翻转复位。
AIRMODE:低油门时保持姿态控制,常与ACRO绑定。
2. 设置步骤
选择目标模式(如ARM)→ 点击Add Range。
拨动遥控器对应开关(如AUX1)→ 软件自动识别通道,拖动黄色滑块覆盖激活区间(例:1300~1700)。
安全验证:
确保ARM开关为瞬时触发或明确高低位,避免误触解锁。
测试时卸桨,观察软件中模式状态随开关变化是否同步。
3. 解锁失败排查(查看Setup标签页的“禁止解锁标志”)
| 错误代码 | 原因 | 解决方案 |
|---|---|---|
| 3 | 接收机无信号(RX Loss) | 检查对频、接线、协议 |
| 7 | 油门未归零 | 校准油门终点或微调 |
| 8 | 飞机倾斜角度过大 | 放置水平或调大 |
| 17 | USB连接未断开 | 拔掉数据线 |
3.3 关键注意事项
-
保存与重启:每次修改后必须点击Save and Reboot,否则设置不生效。
-
接收机绑定问题:
-
Spektrum接收机需CLI输入
set spektrum_sat_bind=9后重启绑定。 -
ELRS接收机支持WiFi模式无线调参:连接端口填
tcp://10.0.0.1。
-
-
模式冲突:避免将互斥模式(如
ANGLE和ACRO)分配在同一开关位置。
3.4 总结流程
-
接收机:接线 → 开端口 → 选协议 → 校通道 → 调死区。
-
模式:分配ARM/飞行模式 → 设开关区间 → 测试响应 → 排查解锁错误。
-
进阶:ELRS用户可无线连接调参;解锁异常速查“禁止解锁标志”。
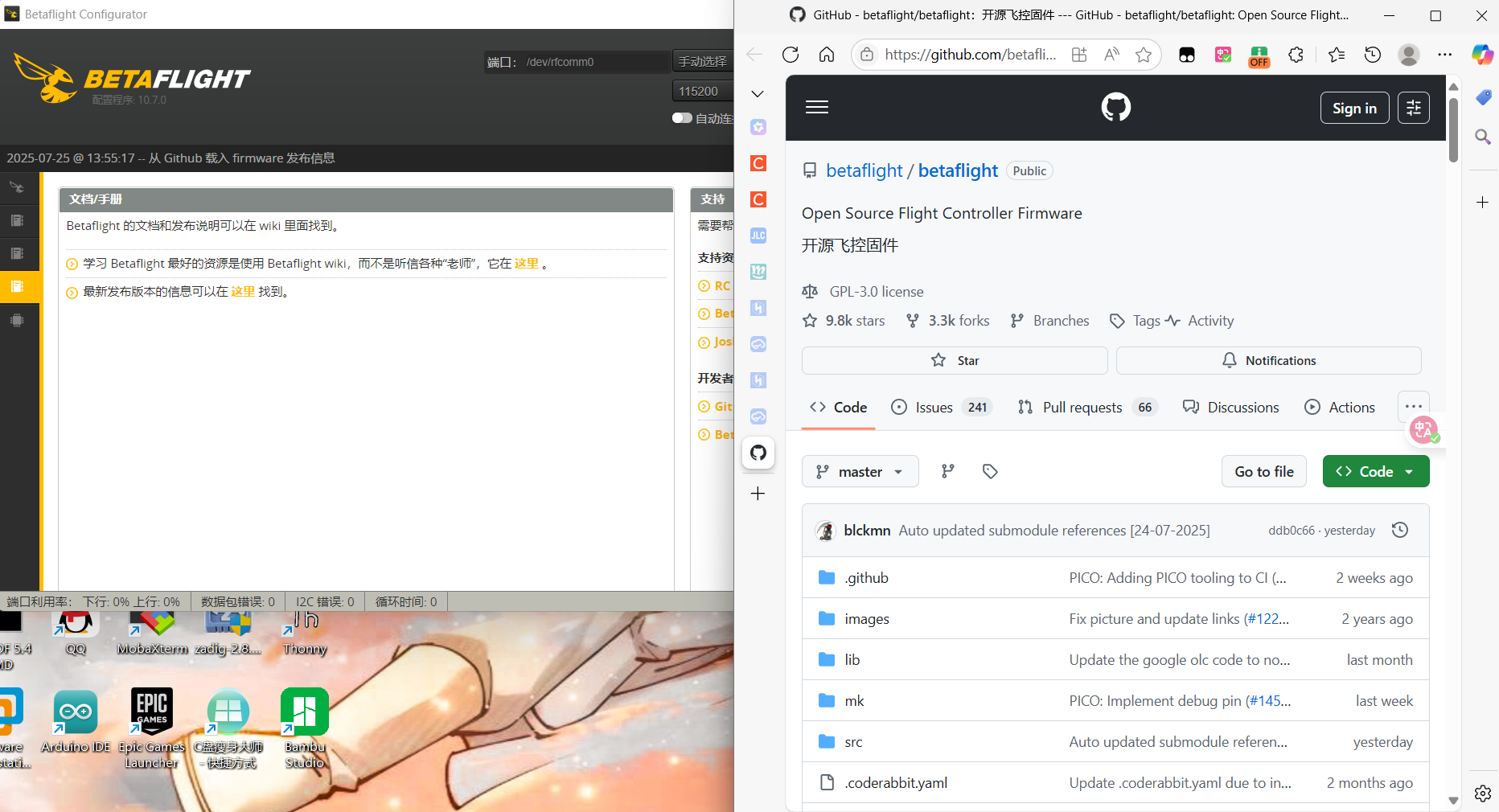
图 4 技术手册网址
第四章:进阶校准
以下是Betaflight进阶调校的详细教学,涵盖滤波器优化、PID调参、资源重映射等核心技术,结合官方文档与实际调试经验整理而成。重点解决高频振动抑制、延迟优化与飞行手感精细化控制问题,个人愚见,仅供参考:
4.1 滤波器优化(核心降噪手段)
1. RPM滤波器(必选项)
作用:根据电机转速实时消除电机谐波噪声,大幅提升陀螺仪数据纯净度。
启用条件:电调支持双向DShot(BLHeli_32需固件≥32.7;BLHeli_S需刷JESC/JazzMaverick固件)。
设置:
set dshot_bidir = ON # 启用双向DShot
set motor_poles = 14 # 根据电机磁极数设置(2207电机通常为14)
set dyn_notch_width_percent = 0 # 关闭动态陷波宽度(避免冲突)
set dyn_notch_q = 250 # 提高Q值以聚焦窄频噪声
验证步骤:
验证步骤:
-
拆桨上电 → 进入Motor标签页。
-
推动单电机滑块 → 观察
R: [转速值]实时显示(若显示E >0%则数据包异常,检查接线)
2. 低通滤波器调优
原则:启用RPM滤波后,可大幅减少低通滤波强度以降低延迟。
操作:进入PID调校 → 滤波器标签页。
双滑块向右拖动:左滑块(陀螺仪低通):建议1.5×~2.0×(默认值倍数)右滑块(Dterm低通):建议1.8×~2.2×7。
安全边界:烫手阈值:>60°C需回调滑块。每次增加0.2× → 飞行30秒 → 手摸电机温度。
3. 动态陷波滤波器(残噪补漏)
RPM启用后配置:
set dyn_notch_range = MEDIUM # 中频范围(140-600Hz覆盖多数穿越机)
set dyn_notch_min_hz = 90 # 抑制非电机类低频共振
滤波器协同逻辑:RPM主攻电机噪声 → 动态陷波清理结构共振 → 低通滤波兜底残余高频噪声。
4.2 PID与飞行控制算法调校
1. 主滑动条全局调整
| 参数 | 轻型机(<550g) | 重型机(>700g) | 竞速机 | 电影机 |
|---|---|---|---|---|
| 主乘数 | 0.7~0.9 | 1.2~1.5 | 1.0~1.1 | 0.8~1.0 |
| 摇杆响应增益 | 1.0 | 0.8 | 1.3~1.5 | 0.5~0.7 |
| PD平衡 | 默认 | ←左移10% | →右移15% | 默认 |
调节逻辑:
主乘数:整体PID强度(重型机需更高对抗惯性)。
摇杆响应增益:前馈量(高值=瞬态响应快,低值=操作平滑)。
PD平衡:左移降P防抖动,右移增D抑洗桨。
2. 关键进阶参数
I值释放(Iterm Relax):
set iterm_relax = SETPOINT # BF4.2+必选(防动作结束过冲) set iterm_relax_cutoff = 15 # 电影机用10,竞速机用30
反重力(Anti-gravity):
set anti_gravity_gain = 3.5 # 默认2.0,油门骤变时增强姿态锁定
3. 前馈控制优化(减少延迟)
TBS Crossfire/ExpressLRS用户专用:
set ff_interpolate_sp = AVERAGED set rc_smoothing_auto_smoothness = 10 set thr_mid = 20% # 改善油门线性
4.3 硬件级高级配置
1. 资源重映射(飞控引脚维修)
场景:电机/串口焊盘损坏时转移功能。
操作步骤(将MOTOR 2重定向至MOTOR 5引脚):
resource MOTOR 2 none # 解除原映射 resource MOTOR 5 none # 解除目标引脚占用 resource MOTOR 2 A10 # A10为MOTOR 5物理引脚(查resource list) save
2. 摄像头OSD控制
支持摄像头:RunCam/Rattel等带调参协议的FPV摄像头。
CLI配置:
resource CAMERA_CONTROL 1 B03 # 指定控制引脚 set camera_control_mode = HARDWARE_PWM set camera_control_ref_voltage = 330 # 悬空电压(3.3V)
操作:解锁后油门中位 + 俯仰杆上推 → 进入OSD菜单
4.4 调校方法论与工具
-
黑匣子(Blackbox)分析流程:
-
飞行→录日志→用[Blackbox Explorer]导入。
-
重点看:陀螺仪(噪声)、设定值(延迟)、电机输出(振荡)。
-
-
CPU负载监控:
tasks # 查看各任务负载,总负载应<70%(防丢帧)
-
参数备份与恢复:
-
diff all→ 复制文本至本地(全配置备份)。 -
崩溃后粘贴回CLI →
save
-
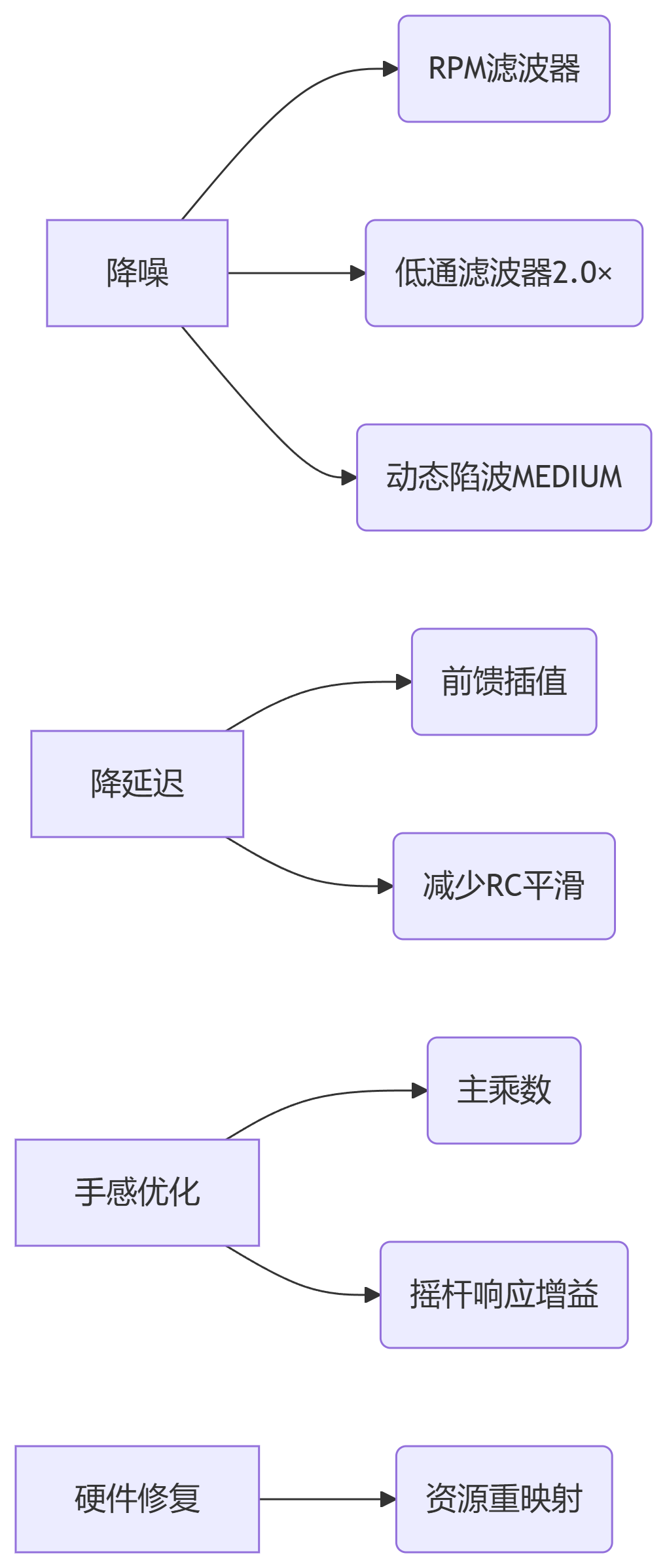
图 5 进阶校准优先级示意图
第五章:遥控器校准
5.1 校准前准备
-
适用遥控器型号
-
BETAFPV LiteRadio系列(1/2 SE/3)
-
其他品牌(FrSky、Radiomaster等)原理类似,具体操作参考各自说明书。
-
-
必备条件
-
遥控器电量充足(避免校准中断)
-
USB数据线(连接电脑时需关机操作)
-
静置遥控器(摇杆无卡滞、弹簧回中正常)
-
5.2 BETAFPV遥控器校准步骤
1. 进入校准模式
开机状态下短按底部 SETUP键 → 听到 2声蜂鸣 + 红灯双闪 → 进入中位校准模式。
2. 摇杆中位校准
将左右摇杆置于 绝对中心位置(无偏移)→ 再次短按 SETUP键 → 听到 3声蜂鸣 + 红灯双闪 → 进入边界校准模式。
3. 摇杆边界校准
依次将摇杆推至 四个极限位置(正上、正下、正左、正右),每个位置 停留1~2秒 → 完成后短按 SETUP键 → 听到 长鸣3秒 + 红灯常亮 → 校准完成。
5.3 电脑端辅助校准(BETAFPV Configurator)
适用场景:摇杆微调、通道反向、模式切换(如美国手改日本手)。
-
连接电脑
遥控器 关机 → USB连接电脑 → LED红/绿灯渐变闪烁(识别为HID设备)。 -
软件操作
打开 BETAFPV Configurator → 切换至 遥控器配置页面 → 点击 “连接遥控器”。 -
功能校准
通道微调:拖动滑块调整中立点偏移(如油门未归零时修正至1500μs)。 通道反向:勾选通道后的Reverse选项(若打杆方向与模拟器显示相反) 摇杆模式切换:直接选择 Mode 1(日本手) 或 Mode 2(美国手)
5.4 模拟器验证校准结果
-
连接模拟器
遥控器 关机 → USB连接电脑 → 启动模拟器(如LiftOff、VelociDrone)。 -
通道校准
进入模拟器控制设置 → 点击 Calibrate → 按提示推动摇杆至各极限位并回中 → 保存设置。 -
验证项:
摇杆回中时模拟器通道值 无跳动(中立点稳定); 全行程推动时数值 线性变化(0%→100%无突变); 解锁开关(如SA)触发状态与设定一致。
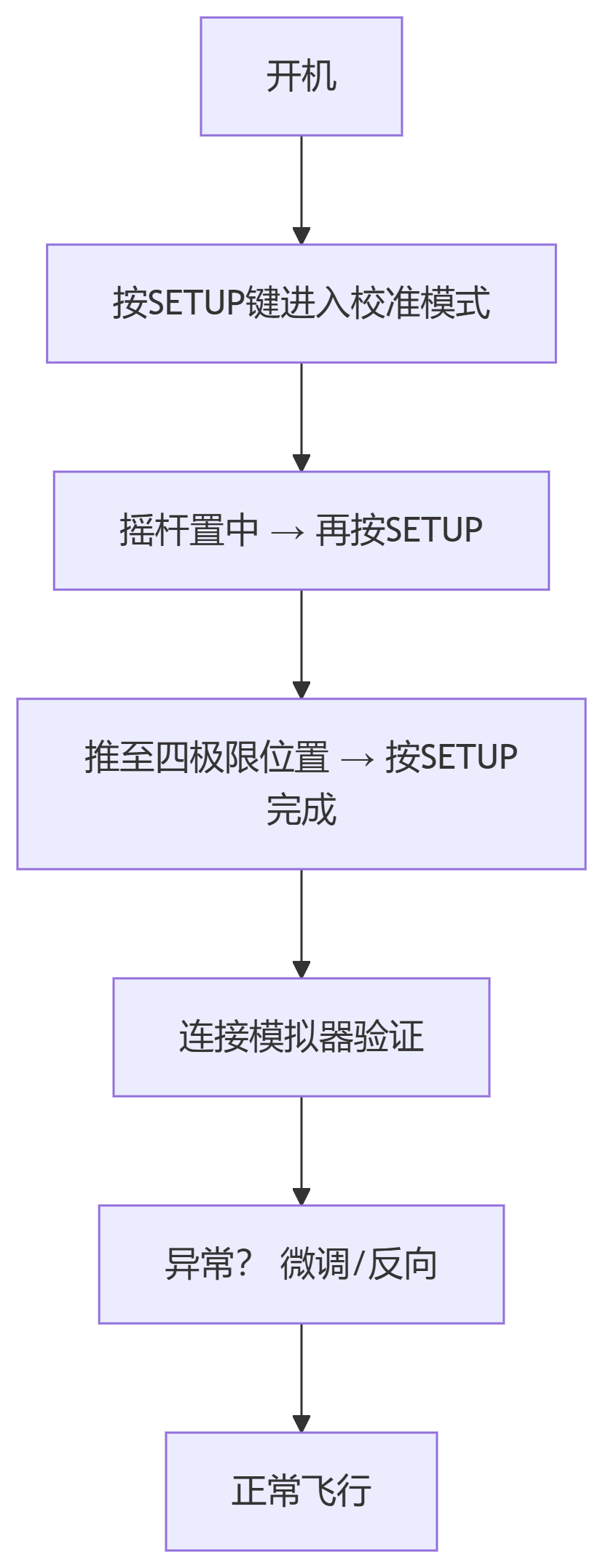
图 6 校准流程图
第六章:固件烧录与bootloader更新
6.1 操作前准备
-
必备工具与文件
-
软件:
-
固件文件:
-
飞控固件:从Betaflight GitHub下载对应型号的
.hex文件 -
Bootloader文件:针对PX4需从PX4/Bootloader仓库编译或索要预编译文件
-
-
硬件:USB数据线(确保数据传输稳定)、飞控板、镊子(短接Boot引脚)
-
-
关键备份
-
配置备份:在Betaflight中执行
dump命令,复制全部内容保存为.txt文件 -
参数备份:若切换至PX4,需通过SD卡导出参数
-
6.2 固件烧录步骤(以Betaflight为例)
1. 进入DFU模式
常规方法:
飞控断电 → 按住Boot按钮 → USB连接电脑 → 松开按钮 → 软件显示DFU模式179
驱动异常处理:
打开Zadig → Options → List All Devices → 选择STM32 BOOTLOADER → 安装WinUSB驱动
2. 烧录固件
-
在线烧录:
打开Betaflight Configurator → 点击固件烧写工具(无需连接飞控) 选择飞控型号(如MATEKF405)和版本 → 勾选全盘擦除→ 点击从网络加载固件→ 等待完成 -
本地烧录:
点击从本地电脑加载固件→ 选择下载的.hex文件 → 点击烧写固件
6.3 Bootloader更新方法
1. 通过Betaflight Configurator(推荐)
适用场景:PX4 Bootloader刷写(如切换至ArduPilot)
-
步骤:
-
进入DFU模式(同上)
-
点击
Load Firmware [Local]→ 选择Bootloader二进制文件(如kakutef7_bl.bin) -
点击
Flash Firmware完成烧录
-
2. 通过dfu-util(命令行工具)
适用场景:Betaflight Configurator失败时
-
步骤:
-
进入DFU模式
-
安装dfu-util(下载地址)
-
执行命令:
dfu-util -a 0 --dfuse-address 0x08000000 -D <target>.bin
-
3. 特殊飞控处理(Pixhawk V6X-RT)
使用NXP MCUXpresso Secure Provisioning工具:
进入ISP模式:通过QGC控制台输入reboot -i或短接BOOT按钮
按引导选择内存类型 → 擦除 → 加载.bin文件 → 写入
6.4 烧录后配置恢复
-
配置文件载入:
烧录后重新连接飞控 → 进入CLI命令行 → 粘贴备份的dump内容 → 输入save47 -
精简配置:
执行diff all bare→ 复制输出内容保存为新文件 → 用于后续快速恢复4 -
端口与传感器修复:
若陀螺仪/端口丢失,从unified-targets查找飞控型号对应的config文件 → 复制代码至CLI
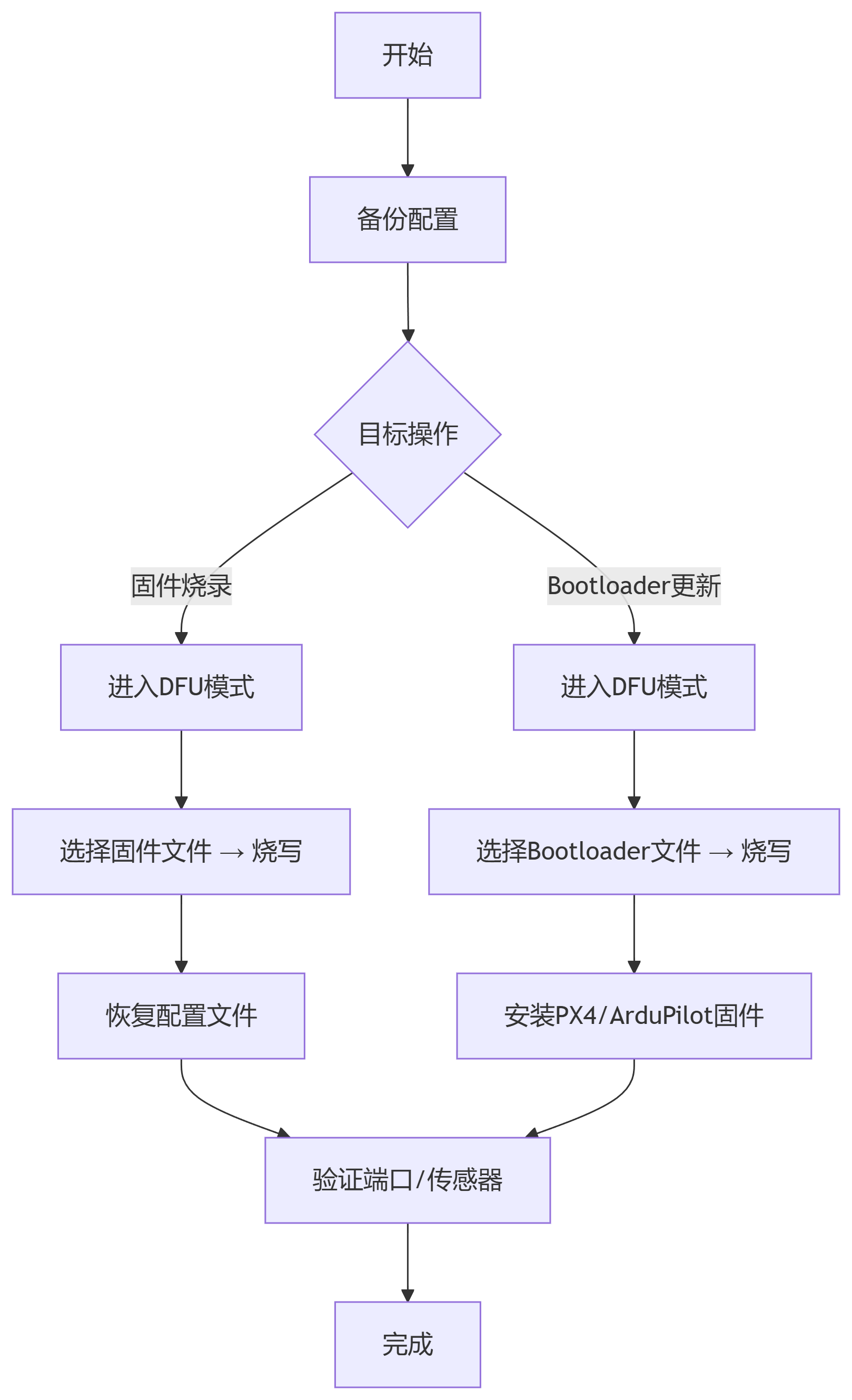
图 6 Bootloader与固件切换流程图

图 7 固件烧录界面
欢迎各位大佬观摩与指点,也欢迎各位在评论区留言与相互交流(●ˇ∀ˇ●)

















 364
364

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









