






01
引入PID
电机控制
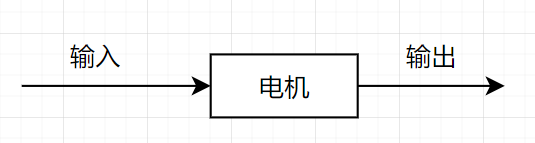
这样是没有反馈的,也就是说我们完全相信输入的数字,且是理想化的模型,比如输入占空比为50%的25Kz的PWM,车轮速度为1m/s,实际产品中会受到各种这样的影响,比如地面阻力,风阻等等,同样输入占空比为50%的25Kz的PWM,车轮的速度并不是1m/s。
这时候我们就引入测量单元,也就是反馈系统。

这个时候,最常见的反馈就是:直接使用反馈值。简单的例子,属于数值X和输出数值y的数学公式是:y=2x,这是这最见的关系。假设我们输入7,测量结果是5,那么我们就直接将输入修改为7+2*(7-5)=11。也就是我们一次直接调整到位。这样调节过于简单粗暴,因为我们直接将输入修改为11,有可能输出直接变成6,超过预期值了。这时候就自然而然的想到多次调节,每次只增加一点,然后测量速度,看一下是否达标。
这就是比例调节Kp。
02
比例调节
举例说明,当前小车速度为0.2,目标速度是1。输出y和输入x的关系是y=1*x。比例系数Kp=0.5。随着时间的增大,输出和输入关系如下。
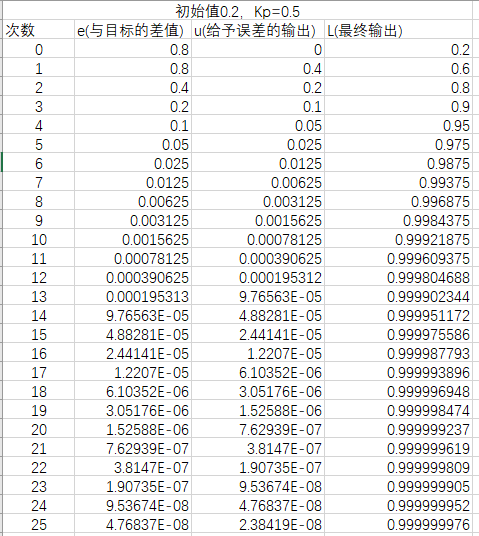
直观折线图显示如下
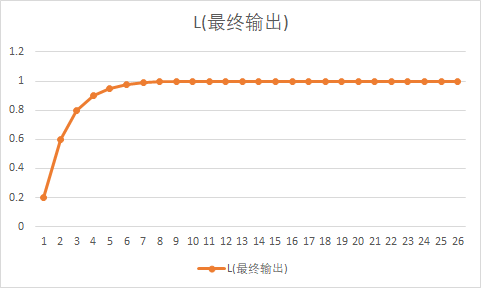
我们发现这太完美了,那么比例环节就能够完美的解决问题了,可是等等,在下这个结论前,我们忽略一个特因素:噪声误差。
在很多系统中都是有噪声的,这我们举例小车中,噪声误差可能来自于电机的误差,外部因素风阻等误差,且是波动的。我们将问题简化,假设外部因素恒定,外部因素是的小车实际输出速度减去1。
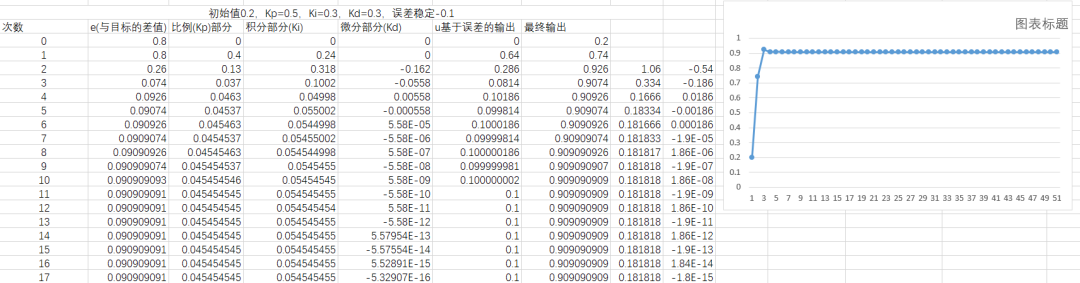
还是上面的例子,当前小车速度为0.2,目标速度是1。输出y和输入x的关系是y=1*x。比例系数Kp=0.5,恒定的误差为-0.1,随着时间的增大,输出和输入关系如下。
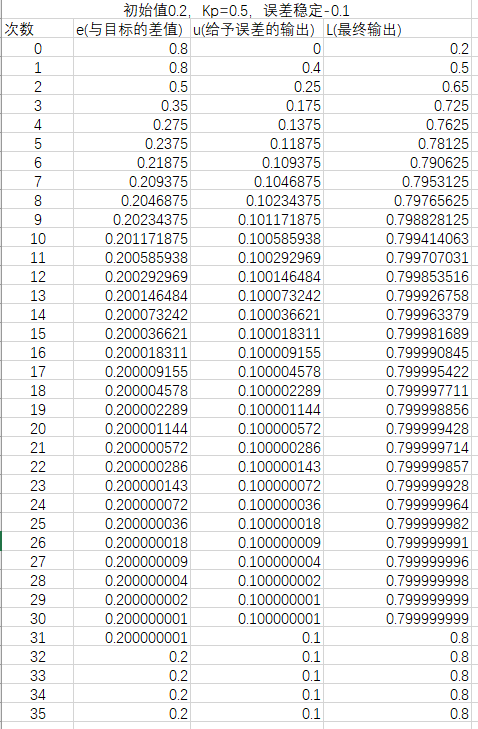
直观折线图显示如下
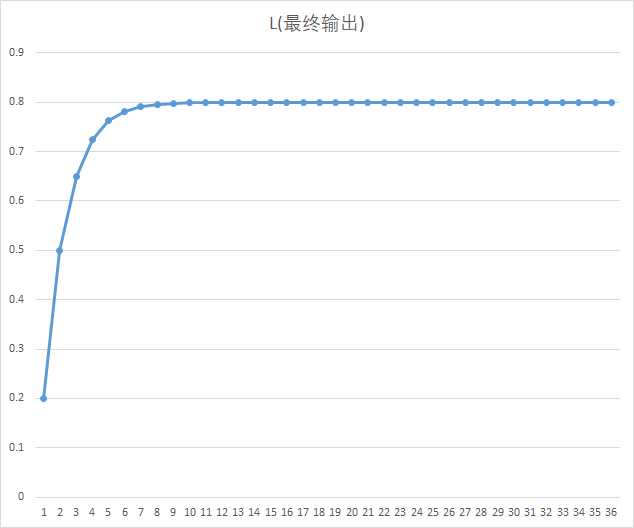
最终输出稳定在0.8,因为我们初始值为0.2,到最后和目标差值是0.2,补偿是0.1,误差正好是-0.1,也就是说等于我们没有补偿。
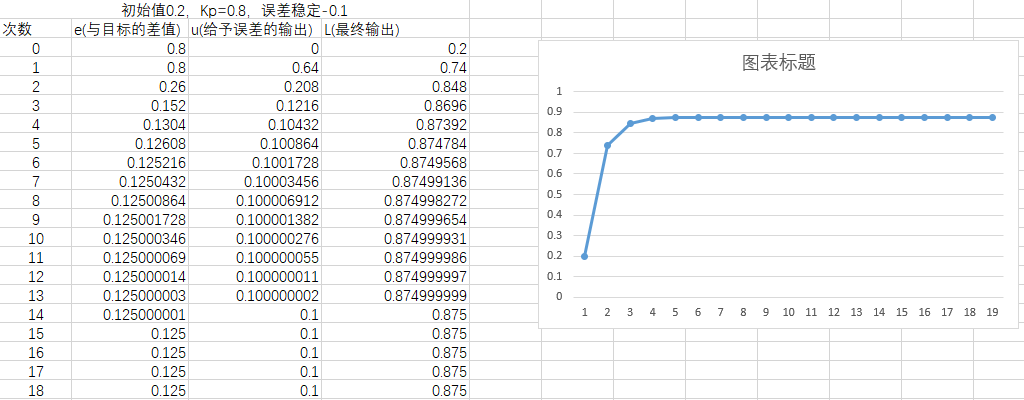
如果我们需要速度达到1呢???办法就是增大比例系数Kp。
误差为0.8时
误差为1.9时
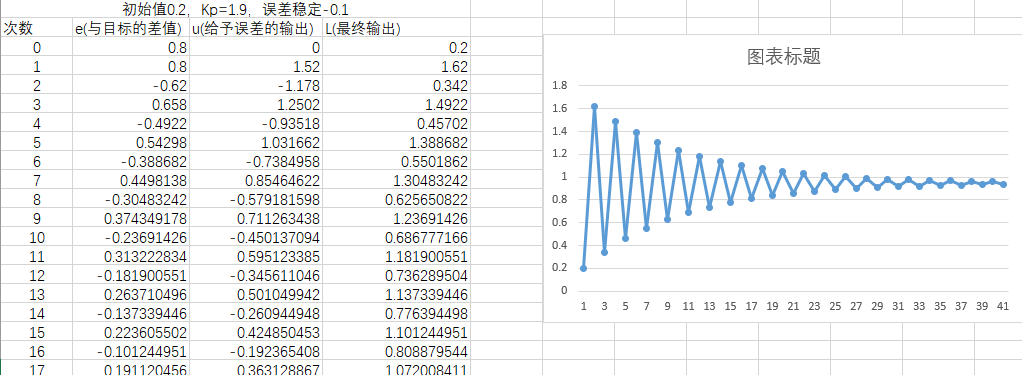
误差为2时,已经完全震荡
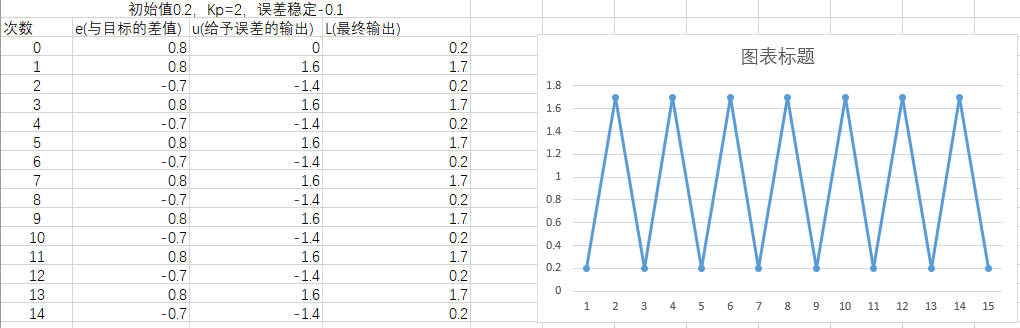
结论:比例控制引入了稳态误差,且无法消除。比例常数增大可以减小稳态误差,但如果太大则引起系统震荡,不稳定。
03
积分调节
为了消除稳态误差,第二次加入积分,使用PI(比例积分控制),积分控制就是将历史误差全部加起来乘以积分常数。公式如下:

u(t) -------------输出曲线,pid输出值随时间的变化曲线
Kp --------------比例系数
e(t)--------------偏差曲线,设定值与实际值的偏差随时间的变化曲线
t-----------------时间
关于定积分,如果你上过高数,且没有睡觉的话。

需要将数学公式离散化,才能用到计算机系统来。

①表示在时间点t,输出的值
②表示在时间点t,输出的误差
③表示从时间0到t,累计误差。
添加Ki参数之后的折线图如下
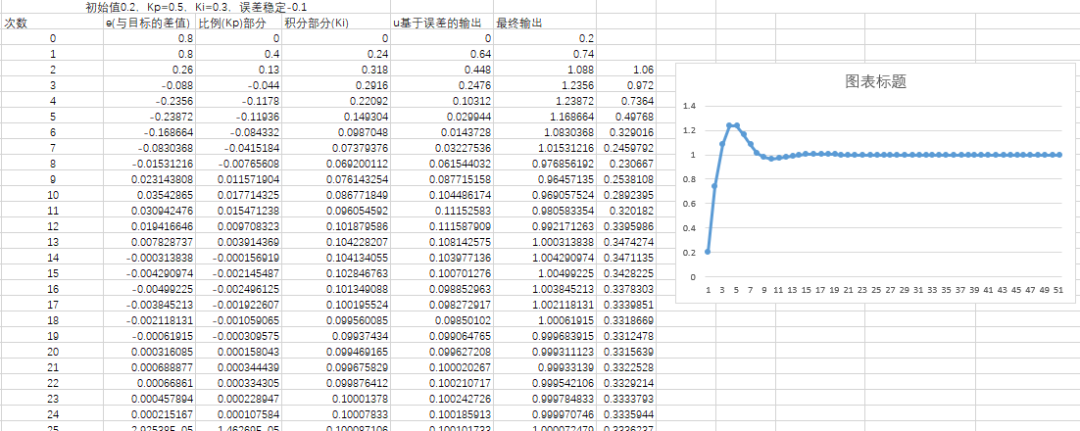
结论:
只要存在偏差,积分就不停的累计,直到误差为0,积分项不再累加,变成一个常数,可以抵消稳态误差.
04
微分调节
引入积分可以消除稳态误差,但会增加超调,且Ki增大,超调量也增大.
为了消除超调,我们引入微分作用

积分就是e(t)曲线的斜率。
将公式离散化为

ek是当前误差,ek-1是上一次误差,所以①就是误差曲线的斜率。
关于PID公式还有其他写法,本质是一样的

离散化后是
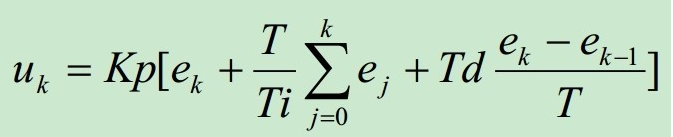
u(t) -------------输出曲线,pid输出值随时间的变化曲线
Kp --------------比例系数
e(t)------------- 偏差曲线,设定值与实际值的偏差随时间的变化曲线
Ti--------------- 积分时间
Td--------------微分时间
T----------------调节周期
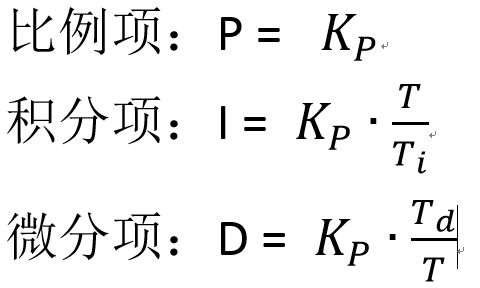
那么PID的参数如下
将前面的示例,加入微分项,Ki=0.3。
折线图如下
结论:微分能够减弱超调趋势。
05
总结
PID调节示意图如下
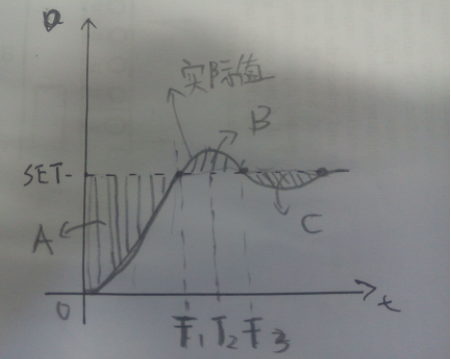
可以发现:
比例项是纠正偏差的主力,越远离偏差绝对值就越大,快速把偏差纠正回来。
积分项和以往的状态有关,面积的绝对值越大它的绝对值就越大,它的作用是消除累计偏差。
微分项跟斜率有关,比较难解释,总的来说它的作用是:当目标靠近设定值时加速它靠近,当目标远离设定值时阻止它远离。因此微分可以增加系统稳定性,因为到达目的之后,离开会受到阻碍。
06
增量PID
上面我们讲解的是位置PID,还有一种增量PID,输出的不是目标值,而是与上次值的差值。直观上将就是u(t)-u(t-1)。
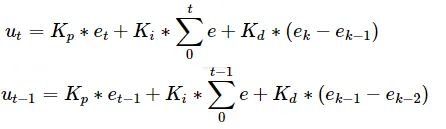
那么u(t)-u(t-1)的公式是
![]()
位置型PID控制器的基本特点:
位置型PID控制的输出与整个过去的状态有关,用到了偏差的累加值,容易产生累积偏差。
位置型PID适用于执行机构不带积分部件的对象。
位置型的输出直接对应对象的输出,对系统的影响比较大。
增量型PID控制器的基本特点:
增量型PID算法不需要做累加,控制量增量的确定仅与最近几次偏差值有关,计算偏差的影响较小。
增量型PID算法得出的是控制量的增量,对系统的影响相对较小。
采用增量型PID算法易于实现手动到自动的无扰动切换。
07
代码编程
位置PID
/*******************************************************************
位置式pid
********************************************************************/
double PID(double Actual,double SET)
{
static double E_sum,Error_last; //上一次误差
double kp=20.767,ki=1.867,kd=115.55;
double pid_out;
double Error_now; //当前误差
Error_now = SET-Actual; //当前误差
// if(Error_now>-0.9&&Error_now<0.9) //防静态误差
// {
// Error_now=0;
// Error_last=0;
// }
E_sum += Error_now; //误差累计
// if(E_sum>484)E_sum=484; //积分限幅度,防止积分饱和
// if(E_sum<-484)E_sum=-484;
pid_out= kp * Error_now + ki * E_sum + kd * (Error_now-Error_last); //pid计算公式
Error_last=Error_now;
// if(pid>900) pid=900; //输出限幅
// if(pid<-900)pid=-900;
return -pid_out;
}
增量PID
error = target_speed - current_speed;
P_error = error;
I_error = error - left_motor.L_error;
D_error = error - 2*left_motor.L_error + left_motor.LL_error;
add = (s16)(KP * P_error + KI * I_error + KD * D_error);
left_motor.ESC_output_PWM += add;
left_motor.LL_error = left_motor.L_error;
left_motor.L_error = error;
excel文件下载:
下载链接:https://pan.baidu.com/s/11FkopQg5iBeLSu_1j8YD1Q
提取码:5ohs

4.嵌入式大会演讲人征集:嵌入式AI、RISC-V、物联网、OS与软件测试
免责声明:本文系网络转载,版权归原作者所有。如涉及作品版权问题,请与我们联系,我们将根据您提供的版权证明材料确认版权并支付稿酬或者删除内容。















 341
341











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









