









 本文详细解读了使用DeepLearnToolbox实现CNN的过程,包括输入层、卷积层、池化层的设置与理解,以及cnnsetup、cnntrain函数的具体作用。通过解析代码,读者能更深入地掌握CNN的实现细节,并为实际应用打下基础。
本文详细解读了使用DeepLearnToolbox实现CNN的过程,包括输入层、卷积层、池化层的设置与理解,以及cnnsetup、cnntrain函数的具体作用。通过解析代码,读者能更深入地掌握CNN的实现细节,并为实际应用打下基础。
==========================================================================================
最近一直在看Deep Learning,各类博客、论文看得不少
但是说实话,这样做有些疏于实现,一来呢自己的电脑也不是很好,二来呢我目前也没能力自己去写一个toolbox
只是跟着Andrew Ng的UFLDL tutorial 写了些已有框架的代码(这部分的代码见github)
后来发现了一个matlab的Deep Learning的toolbox,发现其代码很简单,感觉比较适合用来学习算法
再一个就是matlab的实现可以省略掉很多数据结构的代码,使算法思路非常清晰
所以我想在解读这个toolbox的代码的同时来巩固自己学到的,同时也为下一步的实践打好基础
(本文只是从代码的角度解读算法,具体的算法理论步骤还是需要去看paper的
我会在文中给出一些相关的paper的名字,本文旨在梳理一下算法过程,不会深究算法原理和公式)
==========================================================================================
使用的代码:DeepLearnToolbox ,下载地址:点击打开,感谢该toolbox的作者
==========================================================================================
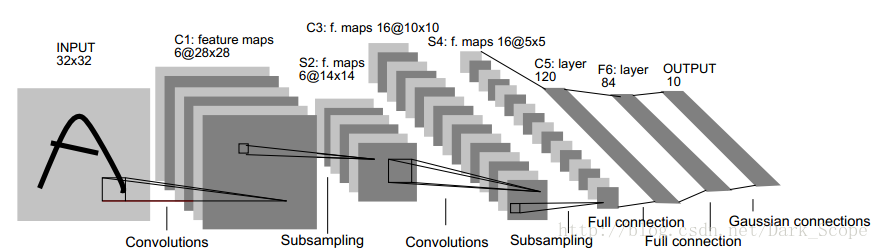
今天是CNN的内容啦,CNN讲起来有些纠结,你可以事先看看convolution和pooling(subsampling),还有这篇:tornadomeet的博文
下面是那张经典的图:
======================================================================================================
打开\tests\test_example_CNN.m一观
cnn.layers = {
struct('type', 'i') %input layer
struct('type', 'c', 'outputmaps', 6, 'kernelsize', 5) %convolution layer
struct('type', 's', 'scale', 2) %sub sampling layer
struct('type', 'c', 'outputmaps', 12, 'kernelsize', 5) %convolution layer
struct('type', 's', 'scale', 2) %subsampling layer
};
cnn = cnnsetup(cnn, train_x, train_y); //here!!!
opts.alpha = 1;
opts.batchsize = 50;
opts.numepochs = 1;
cnn = cnntrain(cnn, train_x, train_y, opts); //here!!!似乎这次要复杂了一些啊,首先是layer,有三种,i是input,c是convolution,s是subsampling
'c'的outputmaps是convolution之后有多少张图,比如上(最上那张经典的))第一层convolution之后就有六个特征图
'c'的kernelsize 其实就是用来convolution的patch是多大
's'的scale就是pooling的size为scale*scale的区域
接下来似乎就是常规思路了,cnnsetup()和cnntrain()啦,我们来看代码
\CNN\cnnsetup.m
function net = cnnsetup(net, x, y)
inputmaps = 1;
mapsize = size(squeeze(x(:, :, 1)));
//尤其注意这几个循环的参数的设定
//numel(net.layers) 表示有多少层
for l = 1 : numel(net.layers) // layer
if strcmp(net.layers{l}.type, 's')
mapsize = mapsize / net.layers{l}.scale;
//subsampling层的mapsize,最开始mapsize是每张图的大小28*28(这是第一次卷积后的结果,卷积前是32*32)
//这里除以scale,就是pooling之后图的大小,这里为14*14
assert(all(floor(mapsize)==mapsize), ['Layer ' num2str(l) ' size must be integer. Actual: ' num2str(mapsize)]);
for j = 1 : inputmaps //inputmap就是上一层有多少张特征图,通过初始化为1然后依层更新得到
net.layers{l}.b{j} = 0;
end
end
if strcmp(net.layers{l}.type, 'c')
mapsize = mapsize - net.layers{l}.kernelsize + 1;
//这里的mapsize可以参见UFLDL里面的那张图下面的解释
fan_out = net.layers{l}.outputmaps * net.layers{l}.kernelsize ^ 2;
//隐藏层的大小,是一个(后层特征图数量)*(用来卷积的patch图的大小)
for j = 1 : net.layers{l}.outputmaps // output map
fan_in = inputmaps * net.layers{l}.kernelsize ^ 2;
//对于每一个后层特征图,有多少个参数链到前层
for i = 1 : inputmaps // input map
net.layers{l}.k{i}{j} = (rand(net.layers{l}.kernelsize) - 0.5) * 2 * sqrt(6 / (fan_in + fan_out));
end
net.layers{l}.b{j} = 0;
end
inputmaps = net.layers{l}.outputmaps;
end
end
// 'onum' is the number of labels, that's why it is calculated using size(y, 1). If you have 20 labels so the output of the network will be 20 neurons.
// 'fvnum' is the number of output neurons at the last layer, the layer just before the output layer.
// 'ffb' is the biases of the output neurons.
// 'ffW' is the weights between the last layer and the output neurons. Note that the last layer is fully connected to the output layer, that's why the size of the weights is (onum * fvnum)
fvnum = prod(mapsize) * inputmaps;
onum = size(y, 1);
//这里是最后一层神经网络的设定
net.ffb = zeros(onum, 1);
net.ffW = (rand(onum, fvnum) - 0.5) * 2 * sqrt(6 / (onum + fvnum));
end
\CNN\cnntrain.m
cnntrain就和nntrain是一个节奏了:
net = cnnff(net, batch_x);
net = cnnbp(net, batch_y);
net = cnnapplygrads(net, opts);cnntrain是用back propagation来计算gradient的,我们一次来看这三个函数:
cnnff.m
function net = cnnff(net, x)
n = numel(net.layers);
net.layers{1}.a{1} = x;
inputmaps = 1;
for l = 2 : n // for each layer
if strcmp(net.layers{l}.type, 'c')
// !!below can probably be handled by insane matrix operations
for j = 1 : net.layers{l}.outputmaps // for each output map
// create temp output map
z = zeros(size(net.layers{l - 1}.a{1}) - [net.layers{l}.kernelsize - 1 net.layers{l}.kernelsize - 1 0]);
for i = 1 : inputmaps // for each input map
// convolve with corresponding kernel and add to temp output map
// 做卷积,参考UFLDL,这里是对每一个input的特征图做一次卷积,再加起来
z = z + convn(net.layers{l - 1}.a{i}, net.layers{l}.k{i}{j}, 'valid');
end
// add bias, pass through nonlinearity
// 加入bias
net.layers{l}.a{j} = sigm(z + net.layers{l}.b{j});
end
// set number of input maps to this layers number of outputmaps
inputmaps = net.layers{l}.outputmaps;
elseif strcmp(net.layers{l}.type, 's')
// downsample
for j = 1 : inputmaps
//这里有点绕绕的,它是新建了一个patch来做卷积,但我们要的是pooling,所以它跳着把结果读出来,步长为scale
//这里做的是mean-pooling
z = convn(net.layers{l - 1}.a{j}, ones(net.layers{l}.scale) / (net.layers{l}.scale ^ 2), 'valid'); // !! replace with variable
net.layers{l}.a{j} = z(1 : net.layers{l}.scale : end, 1 : net.layers{l}.scale : end, :);
end
end
end
// 收纳到一个vector里面,方便后面用~~
// concatenate all end layer feature maps into vector
net.fv = [];
for j = 1 : numel(net.layers{n}.a)
sa = size(net.layers{n}.a{j});
net.fv = [net.fv; reshape(net.layers{n}.a{j}, sa(1) * sa(2), sa(3))];
end
// 最后一层的perceptrons,数据识别的结果
net.o = sigm(net.ffW * net.fv + repmat(net.ffb, 1, size(net.fv, 2)));
end
cnnbp.m
这个就哭了,代码有些纠结,不得已又找资料看啊,《Notes on Convolutional Neural Networks》要好一些只是这个toolbox的代码和《Notes on Convolutional Neural Networks》里有些不一样的是这个toolbox在subsampling(也就是pooling层)没有加sigmoid激活函数,只是单纯地pooling了一下,所以这地方还需仔细辨别,这个toolbox里的subsampling是不用计算gradient的,而在Notes里是计算了的
还有这个toolbox没有Combinations of Feature Maps,也就是tornadomeet的博文里这张表格:
具体就去看看上面这篇论文吧

然后就看代码吧:
function net = cnnbp(net, y)
n = numel(net.layers);
// error
net.e = net.o - y;
// loss function
net.L = 1/2* sum(net.e(:) .^ 2) / size(net.e, 2);
//从最后一层的error倒推回来deltas
//和神经网络的bp有些类似
backprop deltas
net.od = net.e .* (net.o .* (1 - net.o)); // output delta
net.fvd = (net.ffW' * net.od); // feature vector delta
if strcmp(net.layers{n}.type, 'c') // only conv layers has sigm function
net.fvd = net.fvd .* (net.fv .* (1 - net.fv));
end
//和神经网络类似,参看神经网络的bp
// reshape feature vector deltas into output map style
sa = size(net.layers{n}.a{1});
fvnum = sa(1) * sa(2);
for j = 1 : numel(net.layers{n}.a)
net.layers{n}.d{j} = reshape(net.fvd(((j - 1) * fvnum + 1) : j * fvnum, :), sa(1), sa(2), sa(3));
end
//这是算delta的步骤
//这部分的计算参看Notes on Convolutional Neural Networks,其中的变化有些复杂
//和这篇文章里稍微有些不一样的是这个toolbox在subsampling(也就是pooling层)没有加sigmoid激活函数
//所以这地方还需仔细辨别
//这这个toolbox里的subsampling是不用计算gradient的,而在上面那篇note里是计算了的
for l = (n - 1) : -1 : 1
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
net.layers{l}.d{j} = net.layers{l}.a{j} .* (1 - net.layers{l}.a{j}) .* (expand(net.layers{l + 1}.d{j}, [net.layers{l + 1}.scale net.layers{l + 1}.scale 1]) / net.layers{l + 1}.scale ^ 2);
end
elseif strcmp(net.layers{l}.type, 's')
for i = 1 : numel(net.layers{l}.a)
z = zeros(size(net.layers{l}.a{1}));
for j = 1 : numel(net.layers{l + 1}.a)
z = z + convn(net.layers{l + 1}.d{j}, rot180(net.layers{l + 1}.k{i}{j}), 'full');
end
net.layers{l}.d{i} = z;
end
end
end
//参见paper,注意这里只计算了'c'层的gradient,因为只有这层有参数
calc gradients
for l = 2 : n
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
for i = 1 : numel(net.layers{l - 1}.a)
net.layers{l}.dk{i}{j} = convn(flipall(net.layers{l - 1}.a{i}), net.layers{l}.d{j}, 'valid') / size(net.layers{l}.d{j}, 3);
end
net.layers{l}.db{j} = sum(net.layers{l}.d{j}(:)) / size(net.layers{l}.d{j}, 3);
end
end
end
//最后一层perceptron的gradient的计算
net.dffW = net.od * (net.fv)' / size(net.od, 2);
net.dffb = mean(net.od, 2);
function X = rot180(X)
X = flipdim(flipdim(X, 1), 2);
end
end
cnnapplygrads.m
这部分就轻松了,已经有grads了,依次进行梯度更新就好了
function net = cnnapplygrads(net, opts)
for l = 2 : numel(net.layers)
if strcmp(net.layers{l}.type, 'c')
for j = 1 : numel(net.layers{l}.a)
for ii = 1 : numel(net.layers{l - 1}.a)
net.layers{l}.k{ii}{j} = net.layers{l}.k{ii}{j} - opts.alpha * net.layers{l}.dk{ii}{j};
end
net.layers{l}.b{j} = net.layers{l}.b{j} - opts.alpha * net.layers{l}.db{j};
end
end
end
net.ffW = net.ffW - opts.alpha * net.dffW;
net.ffb = net.ffb - opts.alpha * net.dffb;
end
cnntest.m
function [er, bad] = cnntest(net, x, y)
// feedforward
net = cnnff(net, x);
[~, h] = max(net.o);
[~, a] = max(y);
bad = find(h ~= a);
er = numel(bad) / size(y, 2);
end
总结
just code !
这是一个89年的模型啊~~~,最近还和RBM结合起来了,做了一个Imagenet的最好成绩(是这个吧?):
Alex Krizhevsky.ImageNet Classification with Deep Convolutional Neural Networks. Video and Slides, 2012
http://www.cs.utoronto.ca/~rsalakhu/papers/dbm.pdf
【参考】:
【Deep learning:三十八(Stacked CNN简单介绍)】
【UFLDL】
【Notes on Convolutional Neural Networks】
【Convolutional Neural Networks (LeNet)】 这是deeplearning 的theano库的

















 6166
6166

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









