






Datawhale分享
来源:AI寒武纪
前华为天才少年,现上海智元新创技术有限公司创始人稚晖君宣布开源人形机器人全套图纸+代码,这是真正的人工智能开源
从整体来看,这次开源分为硬件和软件两大部分,总资料超过1.2G!
具体来说稚晖君完整开源了智元灵犀X1人形机器人
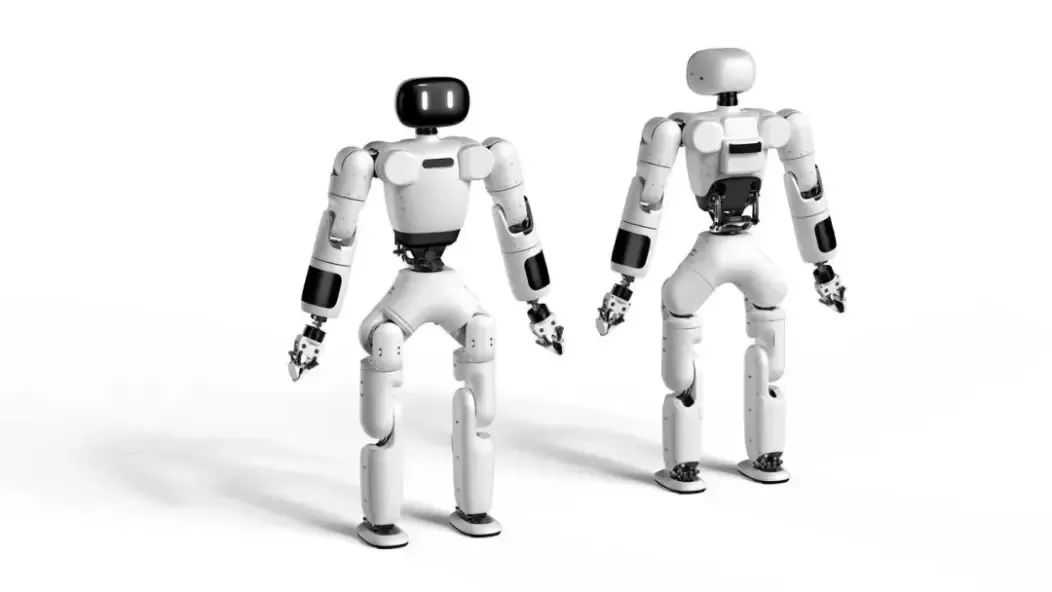
灵犀X1人型机器人概述
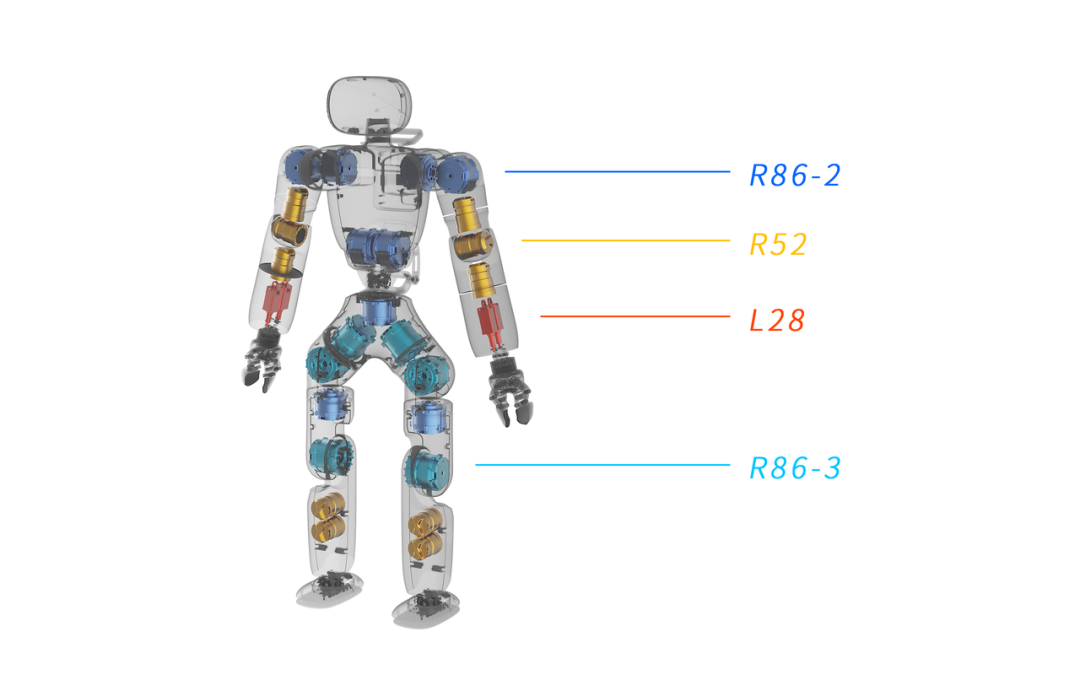
1. 整机结构
灵犀X1全身包含29个关节(R86-29、R86-36、R5210、L284)和2个夹爪,支持扩展头部3自由度
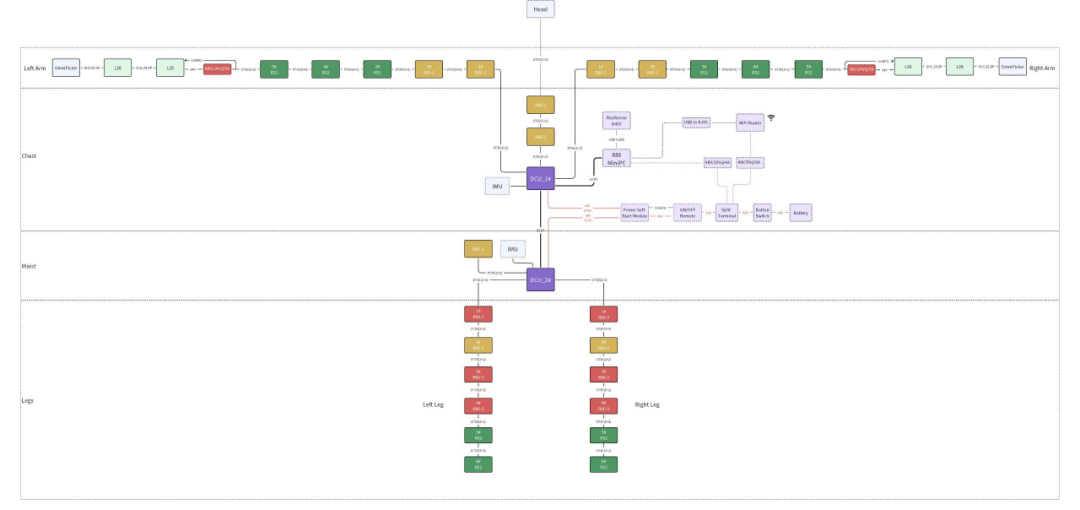
2. 整机硬件
3. 设计资料
BOM清单、整机STEP、整机图纸(SolidWorks)、装机SOP可通过以下任一途径下载:
百度云盘:
https://pan.baidu.com/s/1UEdeDBTJiXRmIqMKwmO5RA?pwd=1234(提取码:1234)
谷歌云盘:
https://drive.google.com/drive/u/1/folders/1MECbyKRJbnc_XKWsdUbn-70xmYFmw9FW
Github:
https://github.com/AgibotTech/agibot_x1_hardware
4. 开源AI代码
推理代码:
https://github.com/AgibotTech/agibot_x1_infer
训练代码:
https://github.com/AgibotTech/agibot_x1_train
相关硬件模块(立创开源平台,陆续上传中):
https://oshwhub.com/pengzhihui/agibot-x1
上海智元新创技术有限公司成立于2023年2月,是一家致力于以Al+机器人的融合创新、打造世界级领先的具身智能机器人产品及应用生态的创新企业
创始团队包括“稚晖君”彭志辉在内的多位业内资深人士,背景综合互补,具有深厚的核心技术背景、产业管理经验和产业资源。截止到目前智元机器人已完成了天使轮、A轮、A1轮、A1+轮、A2轮、A3轮、A4轮等多轮融资
2023年8月,智元机器人发布第一代通用型具身智能机器人原型机—一远征A1;
2024年8月,智元机器人家族系列商用产品发布,在交互服务、柔性智造、特种作业、科研教育及数据采集等场景开启商用量产
彭志辉称自己为野生钢铁侠,其实熟悉他的人都知道这个称号完全担得起,彭志辉擅长从头到尾,从零开始,软硬件一体一手包办,能力非常强,一个天才科技极客,之前他已经开源很多小项目,这次算是整了一个大活

 一起“点赞”三连↓
一起“点赞”三连↓

















 1971
1971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









