







 本文详细介绍了导数与微分的基本概念,包括可导性、可微性和连续性的关系,以及求导法则。接着讨论了一元微分中的中值定理,如罗尔定理、拉格朗日定理、柯西定理和泰勒定理。此外,还涉及了多元函数微分的内容,如偏导数、方向导数、梯度和多元函数的极值问题。文章旨在帮助读者深入理解微积分的基础知识。
本文详细介绍了导数与微分的基本概念,包括可导性、可微性和连续性的关系,以及求导法则。接着讨论了一元微分中的中值定理,如罗尔定理、拉格朗日定理、柯西定理和泰勒定理。此外,还涉及了多元函数微分的内容,如偏导数、方向导数、梯度和多元函数的极值问题。文章旨在帮助读者深入理解微积分的基础知识。
文章目录
一、导数与微分
1.1 基本概念
导数

某点处导数存在的充要条件是该点处左右导数均存在且相等。如 y = ∣ x ∣ y=|x| y=∣x∣ 在 x = 0 x=0 x=0 处的左导数和右导数不相等,因此在该点处不可导。
正是因为可能有不可导点的存在,很多时候需要用定义而不能直接求导函数。
可微

d y dy dy 和 Δ y \Delta y Δy 的关系是: Δ y − d y = ο ( Δ x ) \Delta y -dy=\omicron(\Delta x) Δy−dy=ο(Δx) 。
连续、可导、可微的关系
一元函数可微等价于可导,可导则一定连续,但连续不一定可导。因此只有连续性满足时,不轻易直接利用求导公式求导,而根据定义进行求导。
可导与连续可导
函数 f ( x ) f(x) f(x) 在某区间内可导,则函数在该区间上处处可导,但是导函数不一定是连续的。如果 f ( x ) f(x) f(x) 在某区间内连续可导,才可以说导函数也是连续的。
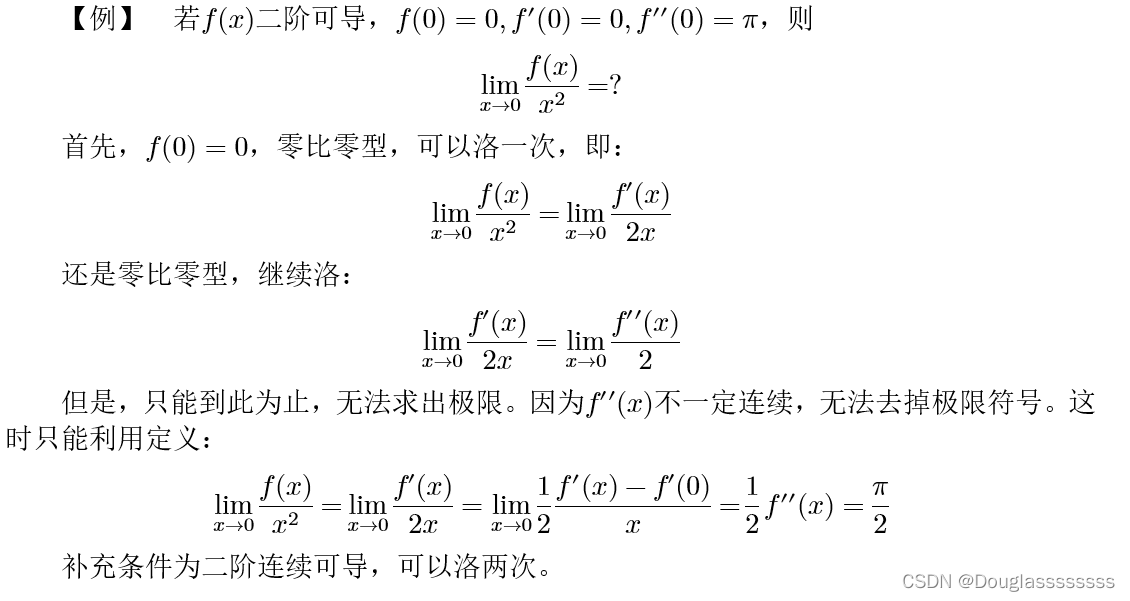
那么,导函数连续不连续有什么影响呢?影响之一就是洛必达法则的使用。例如某函数二阶可导,最多只能洛一次,不能洛到二阶导。说一个例子大家就明白了。
1.2 求导公式与法则
基本求导公式不过多赘述,只补充几个比较容易混的。微分记得后面带上一个 d x dx dx ,复合函数求导则采用链式求导法则。
( a r c s i n x ) ′ = 1 1 − x 2 (arcsinx)'= \frac{1}{\sqrt{1-x^2}} (arcsinx)′=1−x21
( a r c c o s x ) ′ = − 1 1 − x 2 (arccosx)'= - \frac{1}{\sqrt{1-x^2}} (arccosx)′=−1−x21
( a x ) ′ = a x l n a (a^x)'=a^xln a (ax)′=axlna
( s e c x ) ′ = s e c x ⋅ t a n x (sec x)'=sec x\cdot tanx (secx)′=secx⋅tanx
( c s c x ) ′ = − c s c x ⋅ c o t x (csc x)'=-cscx \cdot cotx (cscx)′=−cscx⋅cotx
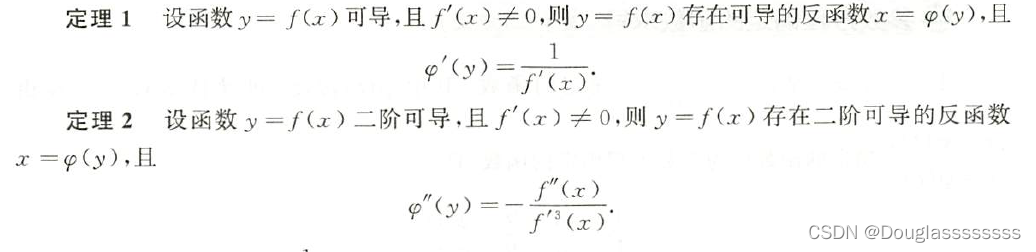
反函数求导法则如下,一阶反函数求导公式可以记一记,二阶可以现场推。
关于高阶导数,有以下几个公式需要掌握。 ( 1 a x + b ) ( n ) = ( − 1 ) n n ! a n ( a x + b ) n + 1 \big(\frac{1}{ax+b}\big)^{(n)}=\frac{(-1)^nn!a^n}{(ax+b)^{n+1}} (ax+b1)(n)=(ax+b)n+1(−1)nn!an ( s i n x ) ( n ) = s i n ( x + n π 2 ) , ( c o s x ) ( n ) = c o s ( x + n π 2 ) (sinx)^{(n)}=sin(x+\frac{n\pi}{2}),(cosx)^{(n)}=cos(x+\frac{n\pi}{2}) (sinx)(n)=sin(x+2nπ),(cosx)(n)=cos(x+2nπ)
1.3 隐函数与参数方程确定的函数求导
需要注意的是隐函数存在的条件,这一块多元函数考的比较多,放到那里来说。
二、中值定理与一元微分应用
2.1 中值定理
罗尔中值定理(Rolle)
若 y = f ( x ) y=f(x) y=f(x) 在 [ a , b ] [a,b] [a,b] 上连续,在 ( a , b ) (a,b) (a,b)上可导,且有 f ( a ) = f ( b ) f(a)=f(b) f(a)=f(b) ,则存在 ξ ∈ ( a , b ) \xi \in (a,b) ξ∈(a,b) ,使得 f ′ ( ξ ) = 0 f'(\xi)=0 f′(ξ)=0 。
1.注意条件,一定是闭区间上连续,开区间上可导,而且 ξ \xi ξ 是在开区间范围内。
2.当不满足罗尔定理的条件时,也有可能存在 f ′ ( ξ ) = 0 f'(\xi)=0 f′(ξ)=0 。
3.罗尔定理存在推广形式,当区间一端为无穷时同样可以有这样的结论。
4.可多次使用,如在证明二阶导数为0情况下。
拉格朗日中值定理(Lagrange)
若 y = f ( x ) y=f(x) y=f(x) 在 [ a , b ] [a,b] [a,b] 上连续,在 ( a , b ) (a,b) (a,b)上可导,则存在 ξ ∈ ( a , b ) \xi \in (a,b) ξ∈(a,b) ,使得 f ′ ( ξ ) = f ( b ) − f ( a ) b − a . f'(\xi)=\frac{f(b)-f(a)}{b-a}. f′(ξ)=b−af(b)−f(a).
拉氏定理可以利用罗尔定理证明得到。
出现三点,可多次使用。
柯西中值定理(Cauchy)
若 f ( x ) , g ( x ) f(x),g(x) f(x),g(x) 在 [ a , b ] [a,b] [a,b] 上连续,在 ( a , b ) (a,b) (a,b)上可导,且 g ′ ( x ) ≠ 0 g'(x) \neq 0 g′(x)=0 ,则存在 ξ ∈ ( a , b ) \xi \in (a,b) ξ∈(a,b) ,使得 f ( b ) − f ( a ) g ( b ) − g ( a ) = f ′ ( ξ ) g ′ ( ξ ) . \frac{f(b)-f(a)}{g(b)-g(a)}=\frac{f'(\xi)}{g'(\xi)}. g(b)−g(a)f(b)−f(a)=g′(ξ)f′(ξ).
泰勒中值定理(Taylor)
设
f
(
x
)
f(x)
f(x) 在
x
0
x_0
x0 的某个邻域内有
n
+
1
n+1
n+1 阶导数,那么在该邻域内,有
f
(
x
)
=
f
(
x
0
)
+
f
′
(
x
0
)
(
x
−
x
0
)
+
f
′
′
(
x
0
)
2
!
(
x
−
x
0
)
2
+
⋯
+
f
(
n
)
(
x
0
)
n
!
(
x
−
x
0
)
n
+
R
n
(
x
)
f(x)=f(x_0)+f'(x_0)(x-x_0)+\frac{f''(x_0)}{2!}(x-x_0)^2+\dots+\frac{f^{(n)}(x_0)}{n!}(x-x_0)^n +R_{n(x)}
f(x)=f(x0)+f′(x0)(x−x0)+2!f′′(x0)(x−x0)2+⋯+n!f(n)(x0)(x−x0)n+Rn(x)
当
R
n
(
x
)
=
ο
(
(
x
−
x
0
)
n
)
R_{n(x)}=\omicron((x-x_0)^n)
Rn(x)=ο((x−x0)n) 时,称为皮亚诺余项。当
R
n
(
x
)
=
f
(
n
+
1
)
(
ξ
)
(
n
+
1
)
!
(
x
−
x
0
)
n
+
1
R_{n(x)}=\frac{f^{(n+1)}(\xi)}{(n+1)!}(x-x_0)^{n+1}
Rn(x)=(n+1)!f(n+1)(ξ)(x−x0)n+1 时,称为拉格朗日余项,其中
ξ
\xi
ξ 位于
x
x
x 和
x
0
x_0
x0 之间。
- 皮亚诺余项比较粗略,而拉格朗日余项给出了具体形式,在证明时提供了方便。
- 特别地, x 0 = 0 x_0=0 x0=0 时,称为麦克劳林展开,在求极限时可以用到。没什么是两发泰勒展开不能解决的极限( ̄︶ ̄*)),如果有,那就多展几阶。
下面是一些常用的泰勒展开,背出来前面几次是最好的了。

几个推广形式
导数零点定理
设 y = f ( x ) y=f(x) y=f(x) 在 [ a , b ] [a,b] [a,b] 上连续,在 ( a , b ) (a,b) (a,b)上可导,且 f + ′ ( a ) f − ′ ( b ) < 0 f'_+(a)f'_-(b)<0 f+′(a)f−′(b)<0 ,则存在 ξ ∈ ( a , b ) \xi \in(a,b) ξ∈(a,b) ,使得 f ′ ( ξ ) = 0 f'(\xi)=0 f′(ξ)=0 。
不能用零点定理来证明,因为不能保证 f ′ ( x ) f'(x) f′(x) 是连续的。
导数介值定理
设
y
=
f
(
x
)
y=f(x)
y=f(x) 在
[
a
,
b
]
[a,b]
[a,b] 上连续,在
(
a
,
b
)
(a,b)
(a,b)上可导,且
f
+
′
(
a
)
≠
f
−
′
(
b
)
f'_+(a) \neq f'_-(b)
f+′(a)=f−′(b) ,不妨设
f
+
′
(
a
)
<
f
−
′
(
b
)
f'_+(a) <f'_-(b)
f+′(a)<f−′(b) ,则对任意的
η
∈
(
f
+
′
(
a
)
,
f
−
′
(
b
)
)
\eta \in (f'_+(a) , f'_-(b))
η∈(f+′(a),f−′(b)) ,存在
ξ
∈
(
a
,
b
)
\xi \in(a,b)
ξ∈(a,b) ,使得
f
′
(
ξ
)
=
η
f'(\xi)=\eta
f′(ξ)=η 。
利用导数零点定理证明得到,构造辅助函数 g ( x ) = f ( x ) − η x g(x)=f(x)-\eta x g(x)=f(x)−ηx 。
2.2 单调性与极值、凹凸性、渐近线
极值判别方法
一般可以按照如下步骤进行极值点的判断:
- 找出极值疑点:驻点( f ′ ( x ) = 0 f'(x)=0 f′(x)=0)和导数不存在但在该点处函数有意义的点。
- 对这些点根据临近符号判断,常用的方法是因式分解、保号性等。
凹凸性
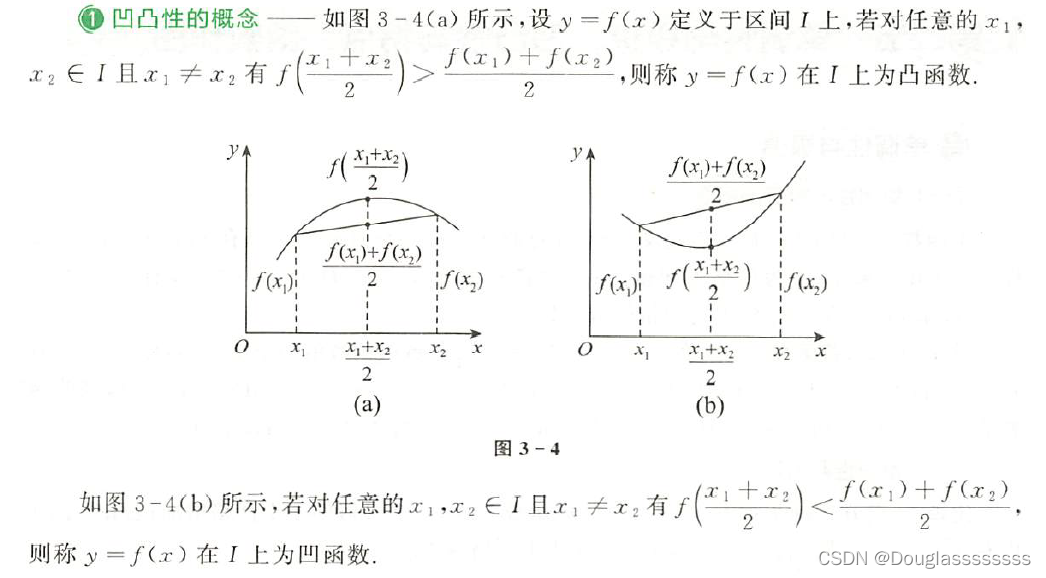
这个一般不会拿来判断凹凸性,更多是帮助理解。
不过对于选择题,可以拿来检验某个点是否为拐点。
判断凹凸性的方法是根据二阶导数来判断,二阶导大于0则是凹的,反之则凸。凹凸性的变化点称为拐点。
设 f ( x ) f(x) f(x) 三阶可导,且 f ′ ′ ( x 0 ) = 0 , f ′ ′ ′ ( x 0 ) ≠ 0 f''(x_0)=0,f'''(x_0) \neq 0 f′′(x0)=0,f′′′(x0)=0 ,则点 ( x 0 , f ( x 0 ) (x_0,f(x_0) (x0,f(x0) 称为一个拐点。
拐点是一个点,不是一个自变量值。
渐近线
渐近线在极限那里就接触过了,主要有三种,水平、铅直和斜。水平的一般看趋于无穷的极限,铅直的看趋近与某点的极限,斜的则是先看除以 x x x的极限,假设为 k k k ,再看减去 k x kx kx 的极限。
一般水平和铅直的都有了,就不用去考虑斜的了。
弧微分、曲率与曲率半径
弧微分基本公式:
(
d
s
)
2
=
(
d
x
)
2
+
(
d
y
)
2
,
d
s
=
1
+
(
f
′
(
x
)
)
2
d
x
(ds)^2=(dx)^2+(dy)^2,ds=\sqrt{1+(f'(x))^2}dx
(ds)2=(dx)2+(dy)2,ds=1+(f′(x))2dx 。
参数方程和极坐标公式如下:

曲率计算公式:
k
=
∣
y
′
′
∣
(
1
+
y
′
2
)
3
2
.
k=\frac{|y''|}{(1+y'^2)^{\frac{3}{2}}}.
k=(1+y′2)23∣y′′∣.
曲率半径:
R
=
1
/
k
.
R=1/k.
R=1/k.
曲率圆有一个隐含条件,就是在该点处的切线是与曲率圆相切的,垂直关系。
三、多元函数微分
3.1 基本概念
和一元类似,极限、连续等概念,不过复杂的多,因为是在二维平面,有无数个方向趋近于那个点,因此求它的极限也就相当复杂,一般是代换为一元或夹挤定理。这一部分不是重点。
导数的话有新名词,叫偏导数,符号是 ∂ \partial ∂ 。如果保持一个自变量不变,就是一个一元函数,可以利用前面的所有性质定理,所以不必太害怕。另一个新概念是叫方向导数,和方向余弦有关。
可微的话是叫作全微分,也是比较复杂写的,而且多元函数可微、连续和可偏导之间关系和一元大有不同。
还有一个概念是梯度,也就是方向导数最大,函数上升最快的地方,很有应用意义。
3.2 基本理论
有界闭区域上连续性质

对于二元函数 f ( x , y ) f(x,y) f(x,y) ,若其两个混合偏导数 f x y ′ ′ , f y x ′ ′ f''_{xy},f''_{yx} fxy′′,fyx′′ 在定义域内连续,则有两个混合偏导数相等。
连续、可偏导和可微的关系
多元函数有关连续、可偏导和可微之间的关系,见下图:

图中只有红色箭头可以进行推得,其余均不成立。连续可偏导指的是偏导数连续。a,b,c表示相对应的反例,分别如下所示。 a : f ( x , y ) = ∣ x ∣ + ∣ y ∣ a:f(x,y)=|x|+|y| a:f(x,y)=∣x∣+∣y∣ b : f ( x , y ) = { x 2 y x 4 + y 2 , ( x , y ) ≠ ( 0 , 0 ) 0 , ( x , y ) = ( 0 , 0 ) \begin{align}b:f(x,y)= & \begin{cases} \frac{x^2y}{x^4+y^2},(x,y) \neq(0,0) \\ 0 , (x,y)=(0,0)\\ \end{cases} \end{align} b:f(x,y)={x4+y2x2y,(x,y)=(0,0)0,(x,y)=(0,0) c : f ( x , y ) = { x y x 2 + y 2 , ( x , y ) ≠ ( 0 , 0 ) 0 , ( x , y ) = ( 0 , 0 ) \begin{align}c:f(x,y)= & \begin{cases} \frac{xy}{\sqrt{x^2+y^2}},(x,y) \neq(0,0) \\ 0 , (x,y)=(0,0)\\ \end{cases} \end{align} c:f(x,y)={x2+y2xy,(x,y)=(0,0)0,(x,y)=(0,0)
求偏导类型
对于显函数求偏导,只要把另一个自变量当成常数即可。对于复合函数求偏导,需要正确理清楚各个字母之间的函数关系,最好是像下面这样写出来。

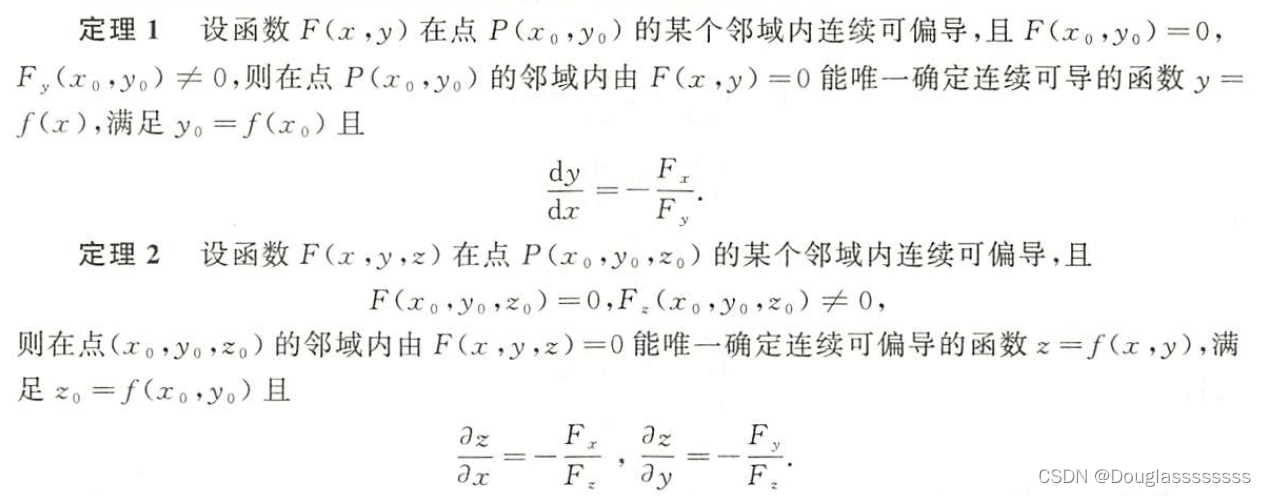
对于隐函数,需要先确定是否存在。如下图中的定理2,如果不能保证 F z ′ ( x 0 , y 0 , z 0 ) ≠ 0 F_z'(x_0,y_0,z_0) \neq0 Fz′(x0,y0,z0)=0 ,那么就不能确定 z = f ( x , y ) z=f(x,y) z=f(x,y) 。可以说,哪个偏导不为0,哪个才有资格做函数。
对于变换求偏导,则是需要添加几个中间变量,像复合函数求导那样进行。
3.3 多元函数微分应用
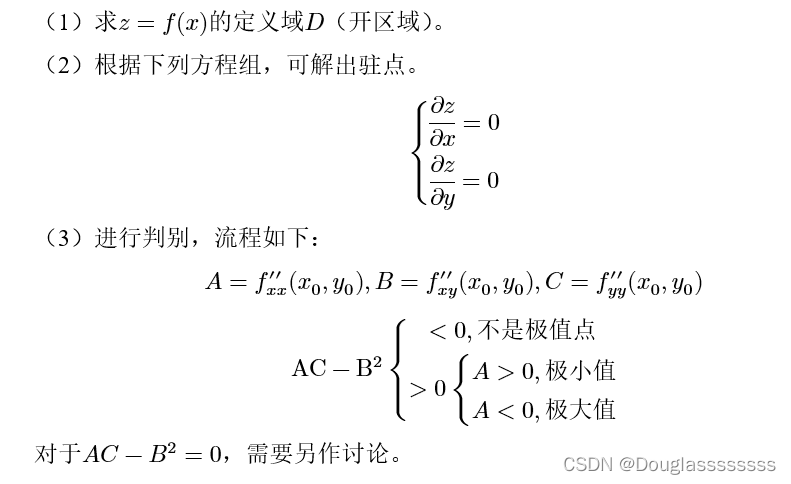
无条件极值
求解步骤如下:
条件极值
所谓条件极值,是指在有约束条件 φ ( x , y ) \varphi(x,y) φ(x,y) 下的极值。主要有三种办法:
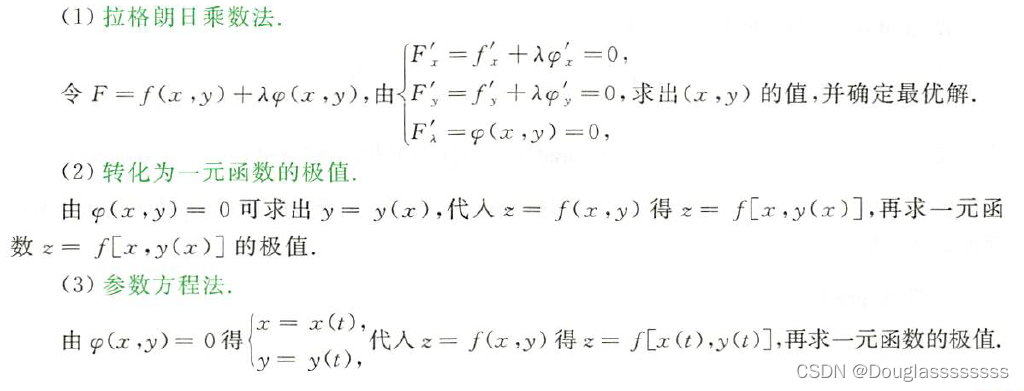
拉格朗日数乘法用的多,关键在解那个方程组,有些可以利用线性代数的一些内容,比如降秩矩阵行列式为0等。解完后按照无条件极值进行判断。
化为一元函数的比较简单些,参数方程有时候有奇效。
对于一些包含边界的区域(如 4 x 2 + y 2 ≤ 25 4x^2+y^2 \leq25 4x2+y2≤25),需要同时计算无条件极值( 4 x 2 + y 2 < 25 4x^2+y^2 <25 4x2+y2<25)和条件极值( 4 x 2 + y 2 = 25 4x^2+y^2 =25 4x2+y2=25)。首先算无条件极值时不用着急去判断是不是极值,可以等所有的极值点求出来后,再去比较大小。
3.4 多元微分物理与几何应用
1. 方向导数与梯度
方向导数
设 z = f ( x , y ) z=f(x,y) z=f(x,y) 在点 M 0 ( x 0 , y 0 ) M_0(x_0,y_0) M0(x0,y0) 的邻域内有定义,过点 M 0 ( x 0 , y 0 ) M_0(x_0,y_0) M0(x0,y0) 作射线 l l l ,任取 M ( x 0 + Δ x , y 0 + Δ y ) ∈ l M(x_0+\Delta x,y_0+\Delta y)\in l M(x0+Δx,y0+Δy)∈l ,令 ρ = ( Δ x ) 2 + ( Δ y ) 2 \rho=\sqrt{(\Delta x)^2+(\Delta y)^2} ρ=(Δx)2+(Δy)2 。若极限 lim ρ → 0 f ( x 0 + Δ x , y 0 + Δ y ) − f ( x 0 , y 0 ) ρ \lim_{\rho \to 0}\frac{f(x_0+\Delta x,y_0+\Delta y)-f(x_0,y_0)}{\rho} ρ→0limρf(x0+Δx,y0+Δy)−f(x0,y0) 存在,称此极限为函数 z = f ( x , y ) z=f(x,y) z=f(x,y) 在点 M 0 ( x 0 , y 0 ) M_0(x_0,y_0) M0(x0,y0) 处沿射线 l l l 的方向导数,记为 ∂ f / ∂ l ∣ M 0 \partial f/\partial l\big|_{M_0} ∂f/∂l M0 。
计算公式: ∂ f / ∂ l ∣ M 0 = ∂ f / ∂ x ∣ M 0 cos α + ∂ f / ∂ y ∣ M 0 cos β \partial f/\partial l\big|_{M_0}=\partial f/\partial x\big|_{M_0}\cos{\alpha}+\partial f/\partial y\big|_{M_0}\cos\beta ∂f/∂l M0=∂f/∂x M0cosα+∂f/∂y M0cosβ ,其中 cos α , cos β \cos\alpha,\cos\beta cosα,cosβ 分别为射线 l l l 的方向余弦。三维空间有类似定义。
梯度
三元函数 u = f ( x , y , z ) u=f(x,y,z) u=f(x,y,z) 在点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0) 处沿射线 l l l 的方向导数为 ∂ u ∂ l ∣ M 0 = ∂ u ∂ x ∣ M 0 cos α + ∂ u ∂ y ∣ M 0 cos β + ∂ u ∂ z ∣ M 0 cos γ = { ∂ u ∂ x , ∂ u ∂ y , ∂ u ∂ z } M 0 ⋅ { cos α , cos β , cos γ } \frac{\partial u}{\partial l}\big|_{M_0}=\frac{\partial u}{\partial x}\big|_{M_0}\cos\alpha+\frac{\partial u}{\partial y}\big|_{M_0}\cos\beta+\frac{\partial u}{\partial z}\big|_{M_0}\cos\gamma=\{\frac{\partial u}{\partial x},\frac{\partial u}{\partial y},\frac{\partial u}{\partial z}\}_{M_0}\cdot\{\cos\alpha,\cos\beta,\cos\gamma\} ∂l∂u M0=∂x∂u M0cosα+∂y∂u M0cosβ+∂z∂u M0cosγ={∂x∂u,∂y∂u,∂z∂u}M0⋅{cosα,cosβ,cosγ} 其中 cos α , cos β , cos γ \cos\alpha,\cos\beta,\cos\gamma cosα,cosβ,cosγ 分别为射线 l l l 的方向余弦。
令 { ∂ u ∂ x , ∂ u ∂ y , ∂ u ∂ z } M 0 = g r a d u ∣ M 0 \{\frac{\partial u}{\partial x},\frac{\partial u}{\partial y},\frac{\partial u}{\partial z}\}_{M_0}=\pmb{grad}\space u |_{M_0} {∂x∂u,∂y∂u,∂z∂u}M0=grad u∣M0 ,而 { cos α , cos β , cos γ } = e \{\cos\alpha,\cos\beta,\cos\gamma\}=\pmb{e} {cosα,cosβ,cosγ}=e 为射线 l l l 对应的单位向量,模为 1 ,方向与 l l l 相同。设 g r a d u ∣ M 0 \pmb{grad}\space u|_{M_0} grad u∣M0 与 e \pmb{e} e 的夹角为 θ \theta θ ,则有 ∂ u ∂ l ∣ M 0 = g r a d u ∣ M 0 ⋅ e = ∣ g r a d u ∣ M 0 ∣ ⋅ ∣ e ∣ = ( ∂ u ∂ x ) 2 + ( ∂ u ∂ y ) 2 + ( ∂ u ∂ z ) 2 ⋅ cos θ , \frac{\partial u}{\partial l}\big|_{M_0}=\pmb{grad}\space u|_{M_0}\cdot\pmb{e}=|\pmb{grad}\space u|_{M_0}|\cdot|\pmb{e}|=\sqrt{(\frac{\partial u}{\partial x})^2+(\frac{\partial u}{\partial y})^2+(\frac{\partial u}{\partial z})^2}\cdot\cos \theta, ∂l∂u M0=grad u∣M0⋅e=∣grad u∣M0∣⋅∣e∣=(∂x∂u)2+(∂y∂u)2+(∂z∂u)2⋅cosθ, 由此可知,当且仅当 θ = 0 \theta=0 θ=0 时,方向导数取最大,此时梯度方向与 e \pmb{e} e 方向相同,称 g r a d u ∣ M 0 = { ∂ u ∂ x , ∂ u ∂ y , ∂ u ∂ z } M 0 \pmb{grad}\space u|_{M_0}=\{\frac{\partial u}{\partial x},\frac{\partial u}{\partial y},\frac{\partial u}{\partial z}\}_{M_0} grad u∣M0={∂x∂u,∂y∂u,∂z∂u}M0 为函数 u u u 在点 M 0 M_0 M0 处的梯度。
2. 多元微分学的几何应用
空间曲面的切平面与法线
设 Σ : F ( x , y , z ) = 0 \varSigma:F(x,y,z)=0 Σ:F(x,y,z)=0 为空间曲面, M 0 ( x 0 , y 0 , z 0 ) ∈ Σ M_0(x_0,y_0,z_0)\in \varSigma M0(x0,y0,z0)∈Σ ,则曲面 Σ \varSigma Σ 在点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0) 处的法向量为 n = { F x ′ ( M 0 ) , F y ′ ( M 0 ) , F z ′ ( M 0 ) } \pmb{n}=\{F'_x(M_0),F'_y(M_0),F'_z(M_0)\} n={Fx′(M0),Fy′(M0),Fz′(M0)} 。
过点 M 0 ( x 0 , y 0 , z 0 ) M_0(x_0,y_0,z_0) M0(x0,y0,z0) 的切平面为 F x ′ ( M 0 ) ( x − x 0 ) + F y ′ ( M 0 ) ( y − y 0 ) + F z ′ ( M 0 ) ( z − z 0 ) = 0 F'_x(M_0)(x-x_0)+F'_y(M_0)(y-y_0)+F'_z(M_0)(z-z_0)=0 Fx′(M0)(x−x0)+Fy′(M0)(y−y0)+Fz′(M0)(z−z0)=0 ,法线为 x − x 0 F x ′ ( M 0 ) = y − y 0 F y ′ ( M 0 ) = z − z 0 F z ′ ( M 0 ) . \frac{x-x_0}{F'_x(M_0)}=\frac{y-y_0}{F'_y(M_0)}=\frac{z-z_0}{F'_z(M_0)}. Fx′(M0)x−x0=Fy′(M0)y−y0=Fz′(M0)z−z0. 空间曲线的切线与法平面
设曲线 L L L 用下列参数方程表示: L : { x = u ( t ) y = v ( t ) z = w ( t ) , L:\begin{cases} x=u(t) \\ y=v(t) \\ z=w(t) \end{cases}, L:⎩ ⎨ ⎧x=u(t)y=v(t)z=w(t), 取参数 t = t 0 t=t_0 t=t0 ,对应曲线上的点为 M 0 ( x 0 , y 0 , z 0 ) ∈ L M_0(x_0,y_0,z_0)\in L M0(x0,y0,z0)∈L ,则
曲线 L L L 在点 M 0 M_0 M0 处的切向量为 T = { u ′ ( t 0 ) , v ′ ( t 0 ) , w ′ ( t 0 ) } . \pmb{T}=\{u'(t_0),v'(t_0),w'(t_0)\}. T={u′(t0),v′(t0),w′(t0)}.
曲线 L L L 在点 M 0 M_0 M0 处的切线为 x − x 0 u ′ ( t 0 ) = y − y 0 v ′ ( t 0 ) = z − z 0 w ′ ( t 0 ) . \frac{x-x_0}{u'(t_0)}=\frac{y-y_0}{v'(t_0)}=\frac{z-z_0}{w'(t_0)}. u′(t0)x−x0=v′(t0)y−y0=w′(t0)z−z0. 曲线 L L L 在点 M 0 M_0 M0 处的法平面方程为 u ′ ( t 0 ) ( x − x 0 ) + v ′ ( t 0 ) ( y − y 0 ) + w ′ ( t 0 ) ( z − z 0 ) = 0. u'(t_0)(x-x_0)+v'(t_0)(y-y_0)+w'(t_0)(z-z_0)=0. u′(t0)(x−x0)+v′(t0)(y−y0)+w′(t0)(z−z0)=0. 当曲线的方程为 Γ = { F ( x , y , z ) = 0 G ( x , y , z ) = 0 , \Gamma=\begin{cases} F(x,y,z)=0 \\ G(x,y,z)=0 \end{cases}, Γ={F(x,y,z)=0G(x,y,z)=0, 点 M 0 ( x 0 , y 0 , z 0 ) ∈ Γ M_0(x_0,y_0,z_0)\in \Gamma M0(x0,y0,z0)∈Γ ,则切线的方向向量为 T = ( { F x ′ , F y ′ , F z ′ } × { G x ′ , G y ′ G F z ′ } ) ∣ M 0 \pmb{T}=(\{F'_x,F'_y,F'_z\}\times\{G'_x,G'_yGF'_z\})\big|_{M_0} T=({Fx′,Fy′,Fz′}×{Gx′,Gy′GFz′}) M0




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











