






Matlab四旋翼无人机ADRC姿态控制器仿真,已调好,附带相关参考文献~
无人机姿态模型,力矩方程,角运动方程
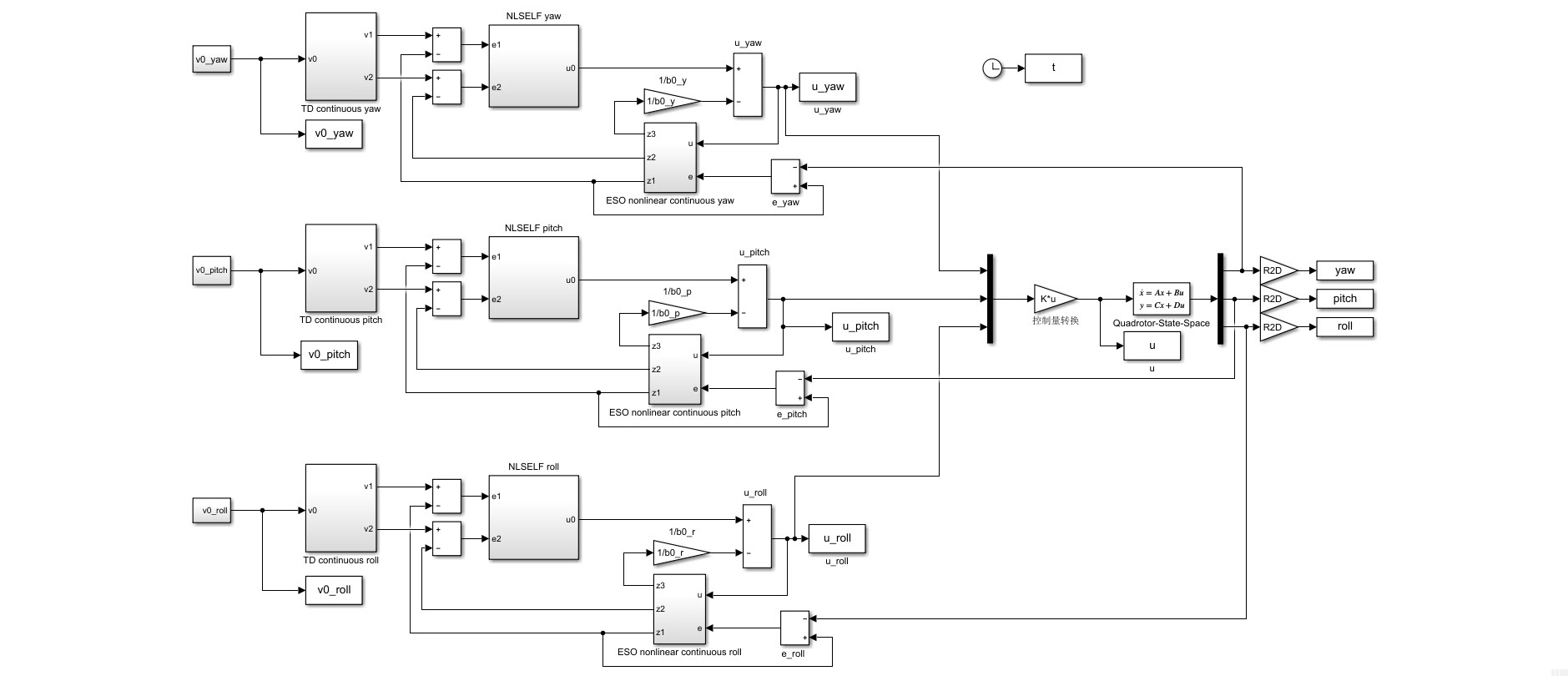
包含三个姿态角的数学模型,以及三个adrc控制器。
简洁易懂,也可自行替换其他控制器。
ID:979732591521578
买家小助手

Matlab四旋翼无人机ADRC姿态控制器仿真,已调好,附带相关参考文献~
无人机姿态模型,力矩方程,角运动方程
数学建模是无人机控制的基础,它通过建立姿态模型、力矩方程和角运动方程等数学模型,为无人机的控制提供理论支持。在这篇文章中,我们将介绍Matlab中使用ADRC姿态控制器进行四旋翼无人机姿态控制的仿真,已经调试好,并附有相关参考文献供读者深入学习。
首先,无人机姿态模型是控制无人机的重要基础。姿态模型描述了飞行器在空间中的姿态,主要包括飞行器的姿态角和角速度等参数。在四旋翼无人机中,常用的姿态角包括俯仰角、横滚角和偏航角。通过建立姿态模型,我们可以了解无人机的姿态变化规律,从而实现精确的控制。
其次,力矩方程是控制无人机旋转的重要数学方程。力矩方程描述了旋转运动的力矩与角加速度之间的关系。在四旋翼无人机中,旋转运动主要由四个电机产生的力矩控制。通过建立力矩方程,我们可以得到无人机旋转运动的精确控制方程,从而实现精准的姿态控制。
最后,角运动方程是描述无人机角速度变化规律的数学方程。角运动方程描述了角速度的变化与力矩之间的关系。在四旋翼无人机中,角速度的变化会受到四个电机产生的力矩的影响。通过建立角运动方程,我们可以了解无人机角速度的变化规律,从而实现对无人机姿态的精确控制。
在ADRC姿态控制器中,我们使用三个控制器来控制四旋翼无人机的姿态。这三个控制器分别是速度环控制器、角度环控制器和高度环控制器。速度环控制器控制四旋翼无人机的角速度,角度环控制器控制无人机的姿态角,高度环控制器控制无人机的飞行高度。通过合理的参数配置和控制策略,ADRC姿态控制器能够实现对四旋翼无人机姿态的精确控制。
总之,本文介绍了Matlab中使用ADRC姿态控制器进行四旋翼无人机姿态控制的仿真,已经调试好,并附有相关参考文献供读者深入学习。通过建立姿态模型、力矩方程和角运动方程等数学模型,我们可以实现对无人机姿态的精确控制。ADRC姿态控制器作为一种常用的控制策略,具有简洁易懂且可替换的特点,在实际应用中具有广泛的应用前景。通过本文的学习,读者可以更好地理解无人机的姿态控制原理,并掌握ADRC姿态控制器在实际应用中的使用方法。
相关的代码,程序地址如下:http://lanzoup.cn/732591521578.html
















 780
780

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









