







一、中间代码的地位和作用
为什么要用中间表示,中间表示的好处?
编译器的前端,经过一系列的工作后,输出了中间表示,看起来很繁琐。
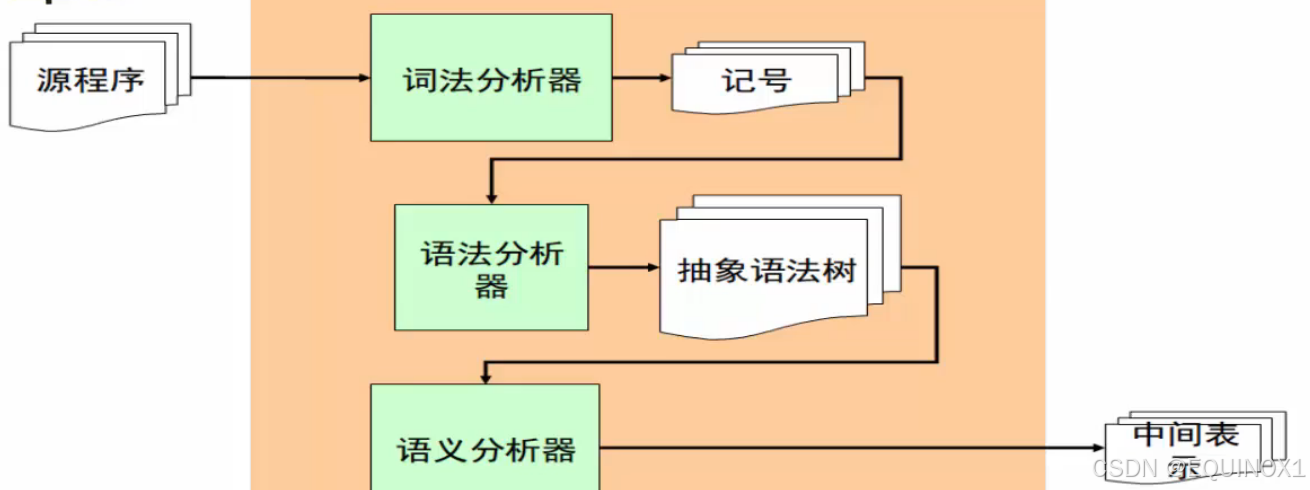
1.1 最简单的结构

最简单的结构可以直接根据抽象语法树经过翻译,得到汇编。
在这种情况下,中间表示只有一种:抽象语法树
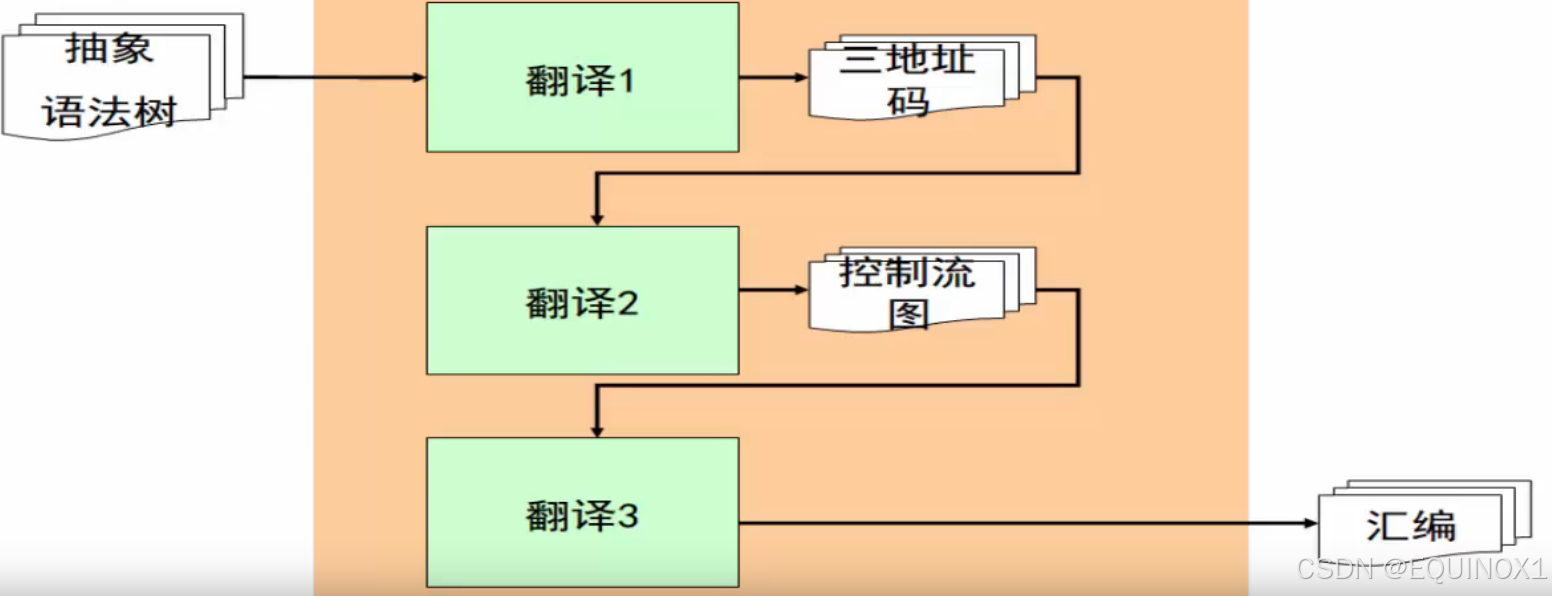
1.2 中间端和后端
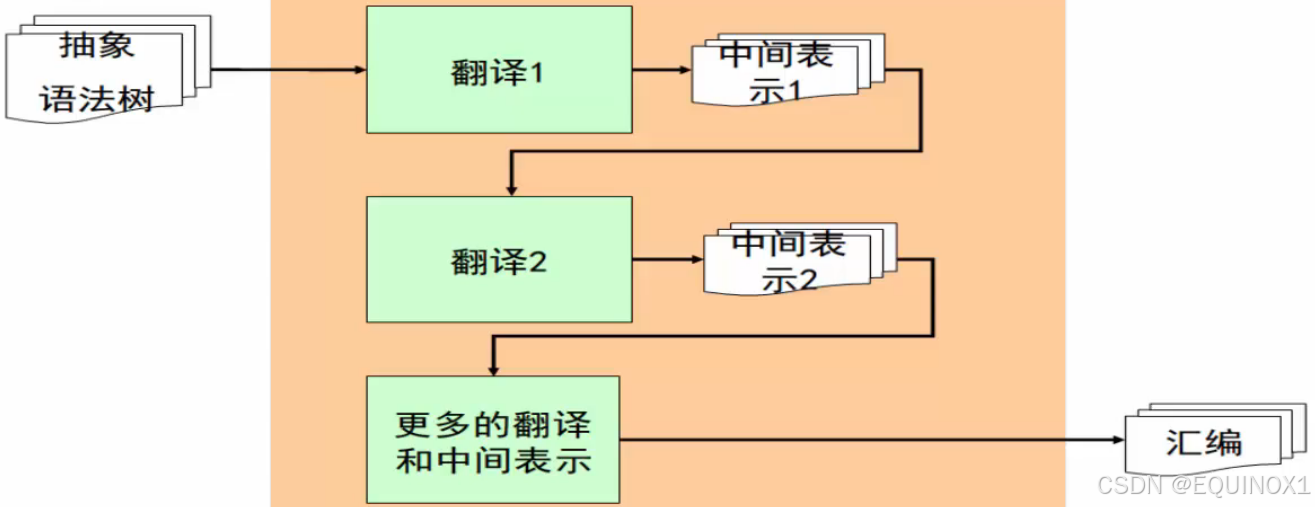
我们看更一般的情况,现代编译器的结构
- 抽象语法树经过翻译,中间表示……该过程可以进行很多步
- 得到汇编
1.3 中间代码
- 树和有向无环图(DAG)
- 高层表示,适用于程序源代码
- 三地址码(3-address code)
- 低层表示,靠近目标机器
- 控制流图(CFG)
- 更精细的三地址码,程序的图状表示、
- 适合做程序分析等
- 静态单赋值形式(SAA)
- 更精细的控制流图
- 同时编码控制流信息和数据流信息
- 连续传递风格(CPS)
- 更一般的SSA
- ……
1.4 为什么要划分成不同的中间表示
- 编译器工程上的考虑
- 阶段划分:把整个编译过程划分成不同的阶段
- **任务分解:**每个阶段只处理翻译过程中的一个步骤
- **代码工程:**代码更容易实现、出错、维护和演进
- 程序分析和代码优化的需要
- 两者都和程序的中间表示密切相关
- 许多优化在特定的中间表示上才可以或才容易进行
- 两者都和程序的中间表示密切相关
1.5 通用编译器语言?
为什么人们一直在期待一种通用的编译器语言?
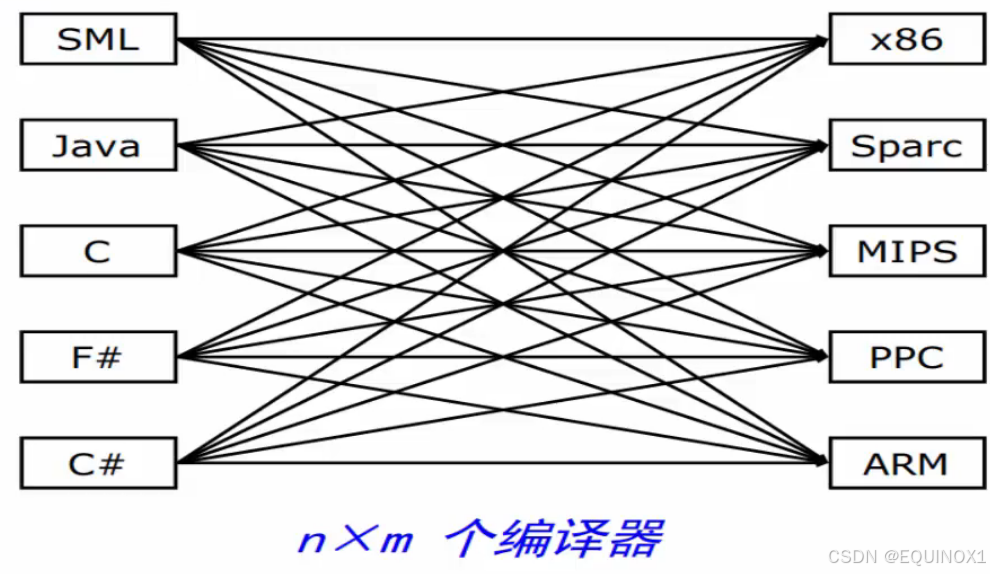
假如我们有n种源语言,m种目标机器语言,那么我们要写 n*m 个编译器
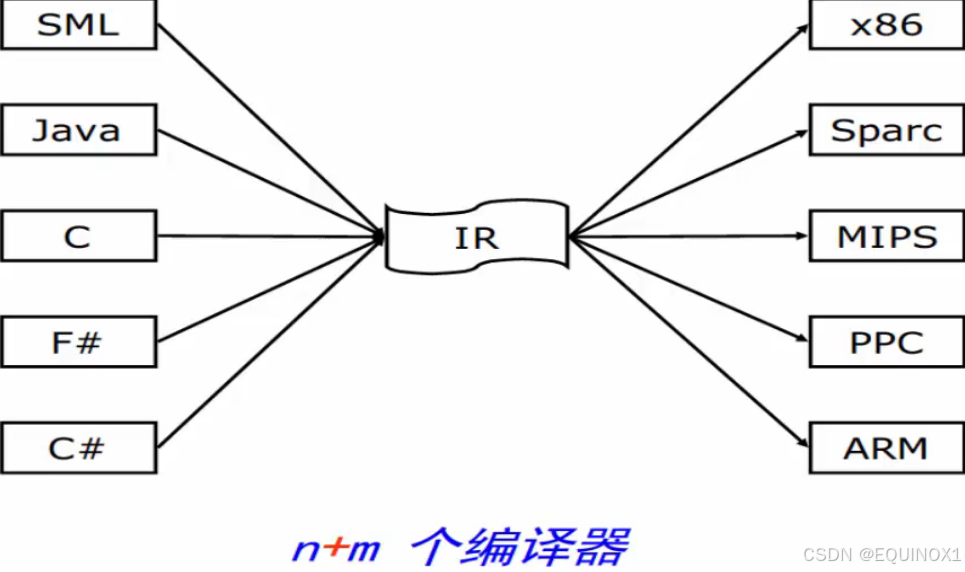
如果我们能够将高级语言都翻译成相同的 IR 这种通用编译器语言,那么我们只需要写 n + m 个编译器
可见,研究编译器语言是非常重要的。
很可惜,现在还没有这样一种 IR,现在只能做到将部分源语言,翻译成同一种中间表示(gcc的做法)
下面将全面讨论中间表示涉及的重要问题和解决方案
- 详细介绍现代编译器中几种常用的重要中间表示
- 三地址码
- 控制流图
- 静态单赋值形式
- 详细介绍在中间表示上做程序分析的理论和技术
- 控制流分析
- 数据流分析
二、中间表示:三地址码
2.1 三地址码基本思想
- 给每个中间变量和计算结果命名
- 没有复合表达式
- 只有最基本的控制流
- 没有各种控制结构
- 如if、while、do-while、for
- 只有goto,call等
- 没有各种控制结构
- 所以三地址码可以看成是抽象的指令集
- 通用的RISC
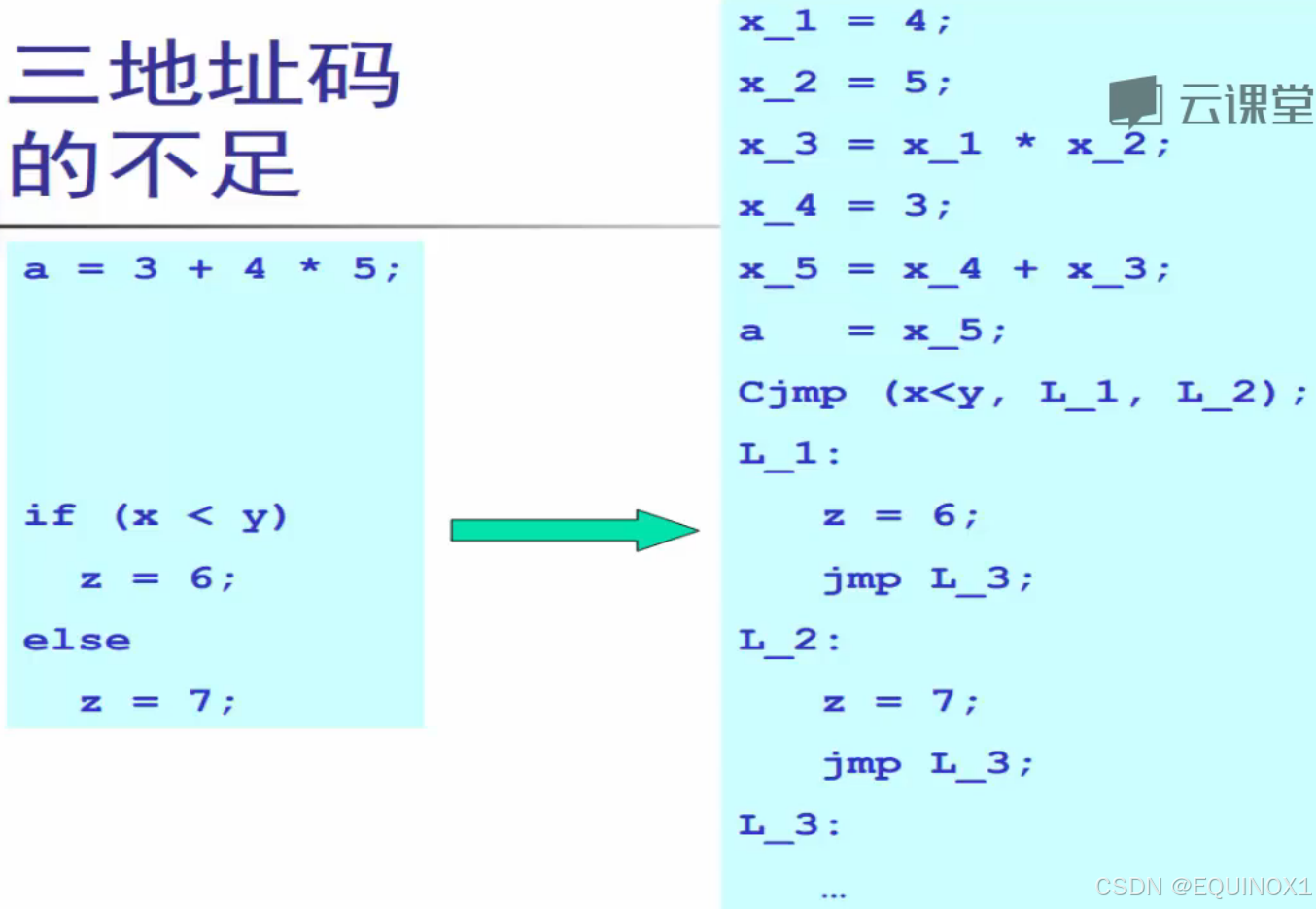
示例
a = 3 + 4 * 5;
if (x < y)
z = 6;
else
z = 7;
=>
x_1 = 4;
x_2 = 5;
x_3 = x_1 * x_2;
x_4 = 3;
x_5 = x_4 + x_3;
a = x_5;
Cjmp(x < y, L_1, L_2);
L_1:
z = 6;
jmp L_3;
L_2:
z = 7;
jmp L_3;
L_3:
...
我们发现三地址码只完成一个动作,不再有复合动作。
2.2 三地址码的定义
三地址码中,一条指令的右侧最多有一个运算符。
- 这也是为什么,前面三地址码只完成一个动作,不再有复合动作。
s -> x = n // 常数赋值
| x = y + z // 二元运算
| x = θ y // 一元运算
| x = y // 数据移动
| x[y] = z // 内存写
| x = y[v] // 内存读
| x = f(x1, ..., xn) // 函数调用
| Cjmp(x1, L1, L2) // 条件跳转
| jmp L // 无条件跳转
| Label L // 标号
| Return x // 函数返回
2.3 如何定义三地址码数据结构?
enum instr_kind {INSERT_CONST, INSTR_MOVE, ...};
struct Instr_t{enum instr_kind kind;};
struct Instr_Add {
enum instr_kind kind;
char *x;
char *y;
char *z;
};
struct Instr_Move{
...;
};
2.4 从C–生成三地址码
P -> F*
F -> x((T, id, )*) {(T, id;)* S*}
T -> int
| bool
S -> x = E
| printi(E)
| printb(E)
| x(E1, ..., En)
| return E
| if(E, E*, S*)
| while(E, S*)
E ->
| x
| true
| false
| E + E
| E && E
需要写如下几个递归函数:
- Gen_P§;
- Gen_F(F);
- Gen_T(T);
- Gen_S(S);
- Gen_E(E);
2.4.1 递归下降代码生成算法:语句的代码生成
Gen_S(S s)
switch (s)
case x=e:
x1 = Gen_E(e);
emit("x = x1");
break;
case printi(e):
x = Gen_E(e);
emit("printi(x)");
break;
case printb(e):
x = Gen_E(e);
emit("printb(x)");
break;
case x(e1, ..., en):
x1 = Gen_E(e1);
...;
xn = Gen_E(en);
emit("x(x1, ..., xn)");
break;
case return e:
x = Gen_E(e);
emit("return x");
break;
case if(e, s1, s2):
x = Gen_E(e);
emit("Cjmp(x, L1, L2)");
emit("Label L1:");
Gen_SList(s1);
emit("jmp L3");
emit("Label L2:");
Gen_SList(s2);
emit("jmp L3");
emit("Label L3:");
break;
case while(e, s):
emit("Label L1:");
x = Gen_E(e);
emit("Cjmp(x, L2, L3)");
emit("Label L2:");
Gen_SList(s);
emit("jmp L1");
emit("Label L3:");
break;
- if 和 while 的逻辑类似
2.5 小结
- 三地址码的优点:
- 所有的操作是原子的
- 变量!没有复合结构
- 控制流结构被简化了
- 只有跳转
- 是抽象的机器代码
- 向后做代码生成更容易
- 所有的操作是原子的
- 三地址码的不足:
- 程序的控制流信息是隐式的:谁可以跳转到谁不是很明显
- 可以做进一步的控制流分析
三、中间表示:控制流图
3.1 三地址码的不足
- 上图给出了一种结构,即控制流图作为三地址码之后的中间表示
- 但是:不同的编译器的中间表示是不同的,所以上图只是一种方式,并非所有的控制流图都要在三地址码后面
三地址码的不足:
- 控制信息是隐式的
- 比如,我们怎样知道有多少条指令会跳转到L_2?我们不得不顺序扫描所有代码
但是如果我们换成如下的控制结构
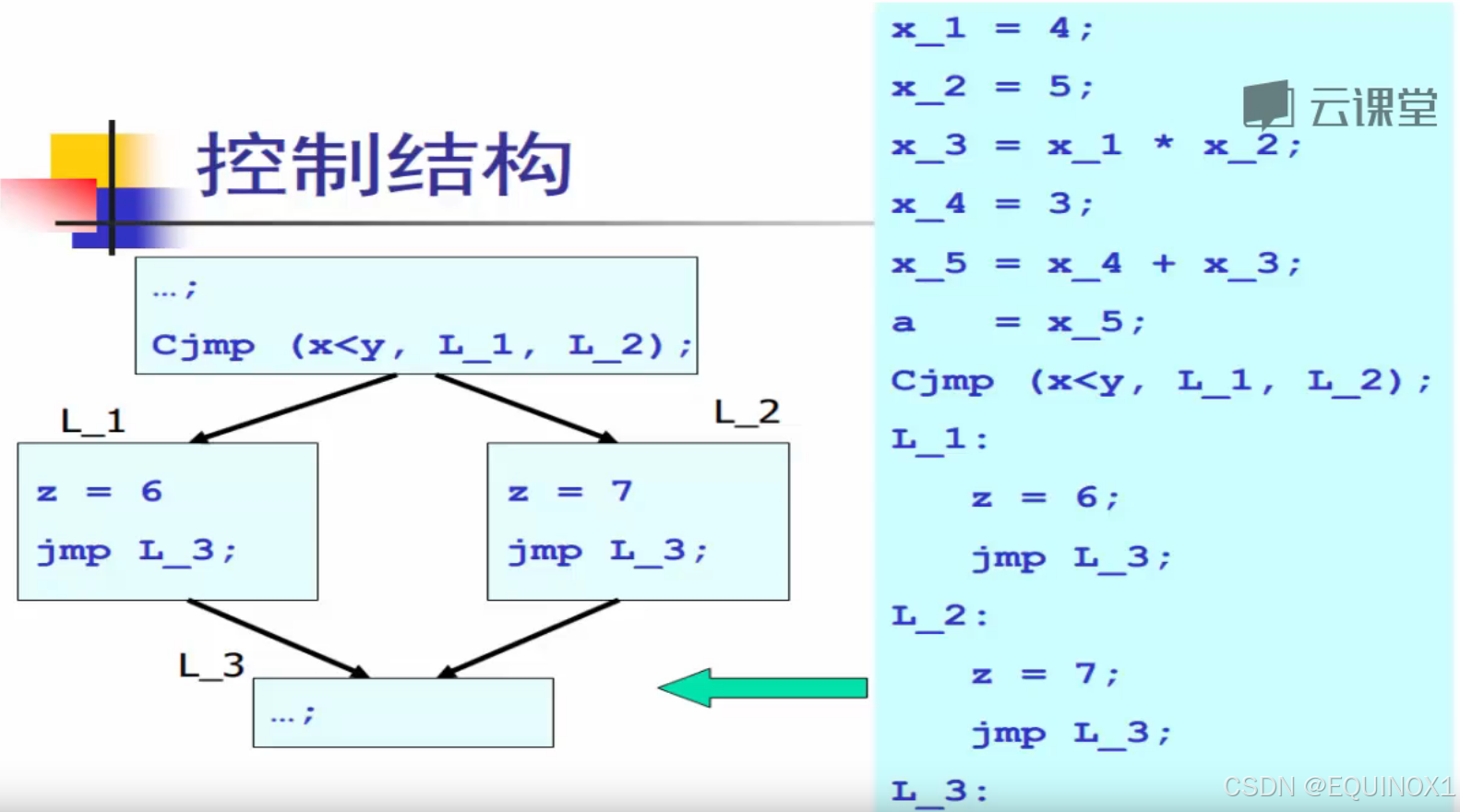
我们发现只需要看L_2的入度即可
- 程序的控制流图表示带来很多好处:
- 控制流分析:
- 对很多程序分析来说,程序的内部结构很重要
- 典型的问题:“程序中是否存在循环?“
- 对很多程序分析来说,程序的内部结构很重要
- 可以进一步进行其他分析:
- 例如数据流分析
- 典型的问题:”程序第5行的变量x可能的值是什么?“
- 例如数据流分析
- 控制流分析:
- 现代编译器的早期阶段就会倾向做控制流分析
- 方便后续阶段的分析
3.2 基本概念
- **基本块:**是语句的一个序列,从第一条执行到最后一条
- 不能从中间进入
- 不能从中间退出
- 即跳转指令只能出现在最后
- **控制流图:**控制流图是一个有向图G=(V, E)
- 节点V:是基本块
- 边E:是基本块之间的跳转关系
示例

3.2.1 控制流图的定义
// 更为精细的三地址码
S -> x = n
| x = y + z
| x = y
| x = f(x1, x2, ..., xn)
J -> jmp L
| cjmp(x, L1, L2)
| return x
B -> Label L;
S1; S2; ...; Sn
J
F -> x() { B1, ..., Bn}
P -> F1, ..., Fn
- 一个基本块要有n + 2个要素:
- 1个名字,n个语句,1个跳转
数据结构定义
struct Block{
Label_t label;
List_t stms;
Jump_t j;
};
3.3 如何生成控制流图
- 可以直接从抽象语法树生成:
- 如果高层语言具有特别规整控制流结构的话较容易
- 也可以先生成三地址码,然后继续生成控制流图:
- 对于像C这样的语言更合适
- 包含像goto这样的非结构化的控制流语句
- 更加通用(阶段划分!)
- 对于像C这样的语言更合适
- 接下来,我们重点讨论第二种
3.4 由三地址码生成控制流图算法
List_t stms; // 三地址码中所有语句
List_t blocks = {}; // 控制流图中的所有基本块
Block_t b = block_fresh();
scan_stms() {
foreach(s ∈ stms) {
if (s is "Label L") // s 是标号
b.Label = L;
else (s is some jump) // s 是跳转
b.j = s;
blocks ∪= {b};
b = Block_fresh();
else // s 是普通指令
b.stms ∪= {s};
}
}
时间复杂度:O(N)
3.5 控制流图的基本操作
- 标准的图论算法都可以用在控制流图的操作上:
- 各种遍历算法、生成树、必经节点结构、等等
- 图节点的顺序有重要的应用:
- 拓扑序、逆拓扑序、近似拓扑序、等等
- 下面通过研究一个具体的例子来展示基本图算法的应用:
- 死基本块删除优化
3.6 死基本块删除优化的示例
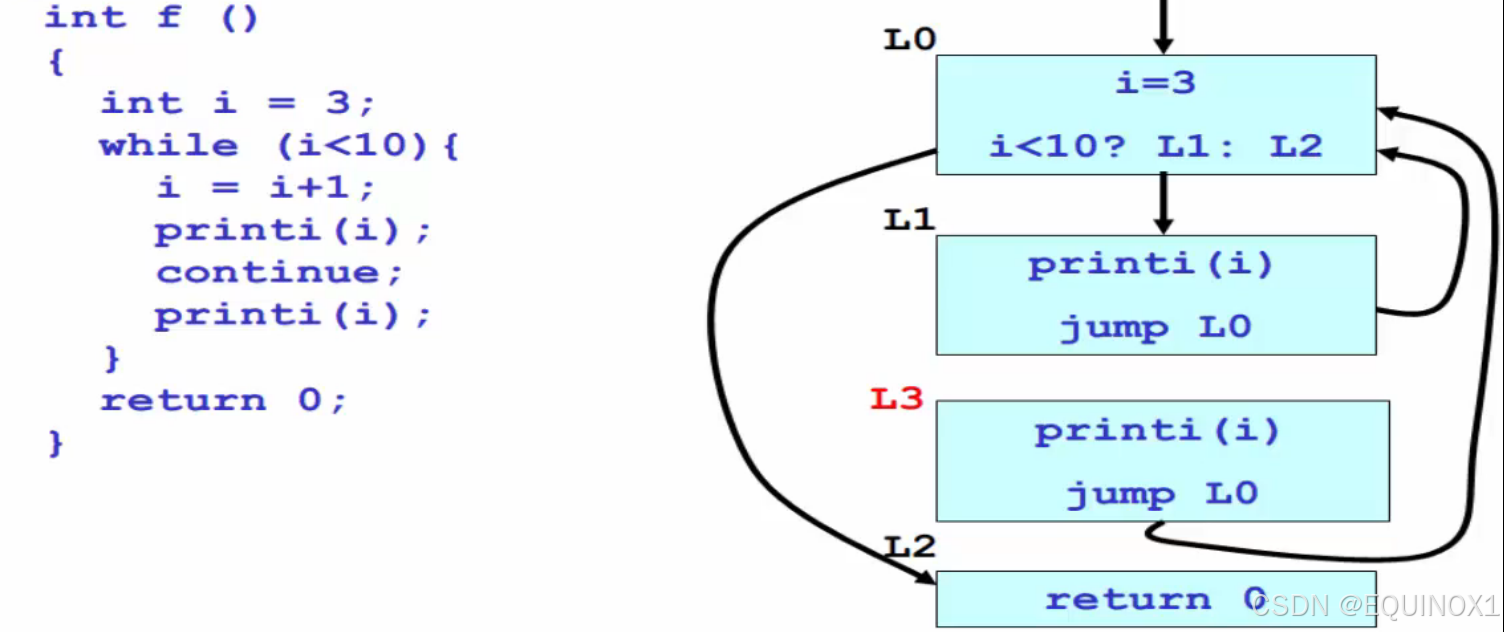
- L3 的入度为0并且走不到,可以删除
四、中间表示:数据流分析
数据流分析往往和优化绑定在一起。
- 值得说明的一点是,优化不仅仅在中间表示阶段发生,现代编译器很激进,也可以在抽象语法树、汇编层面来进行优化。
4.1 优化的一般模式
外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传
- 程序分析
- 控制流分析,数据流分析,依赖分析
- 得到被优化程序的静态保守信息
- 是对动态运行行为的近似
- 程序重写
- 以上一步得到的信息制导对程序的重写
4.2 静态保守
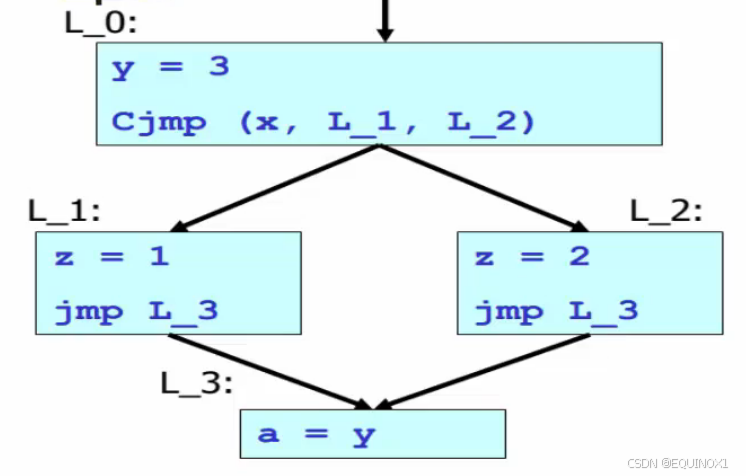
上面是一个有四个基本块的控制流图.
问题:
- 能把y替换成3吗?如果能, 这称为**“常量传播”**优化
对程序进行分析的结果表明:只有L_0块中的y=3能到达L_3。这种分析称为**“到达定义”**分析。
假如我们改写上面的代码:
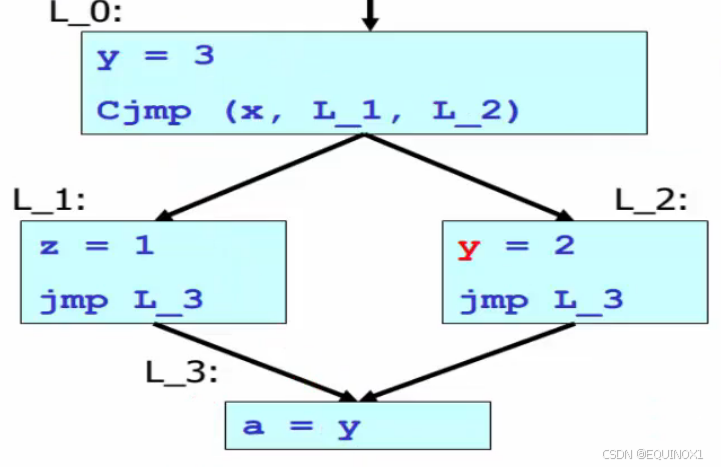
问题:
- 能把y替换成3吗?如果能, 这称为**“常量传播”**优化
- 编译器需要判断 x 是否始终是true
- 但若x是程序输入的话,运行时才能知道值。所以编译器只能采用静态能够获得的信息对程序做保守估计: “L2可能会执行”
小结一下:
- 通过对程序代码进行静态分析,得到关于程序数据相关的保守信息
- 必须保证程序分析的结果是安全的
- 根据优化的目标不同,·雪要进行的数据流分析也不同
- 接下来我们将研究两种具体的数据流分析
- 到达定义分析
- 活性分析
- 接下来我们将研究两种具体的数据流分析
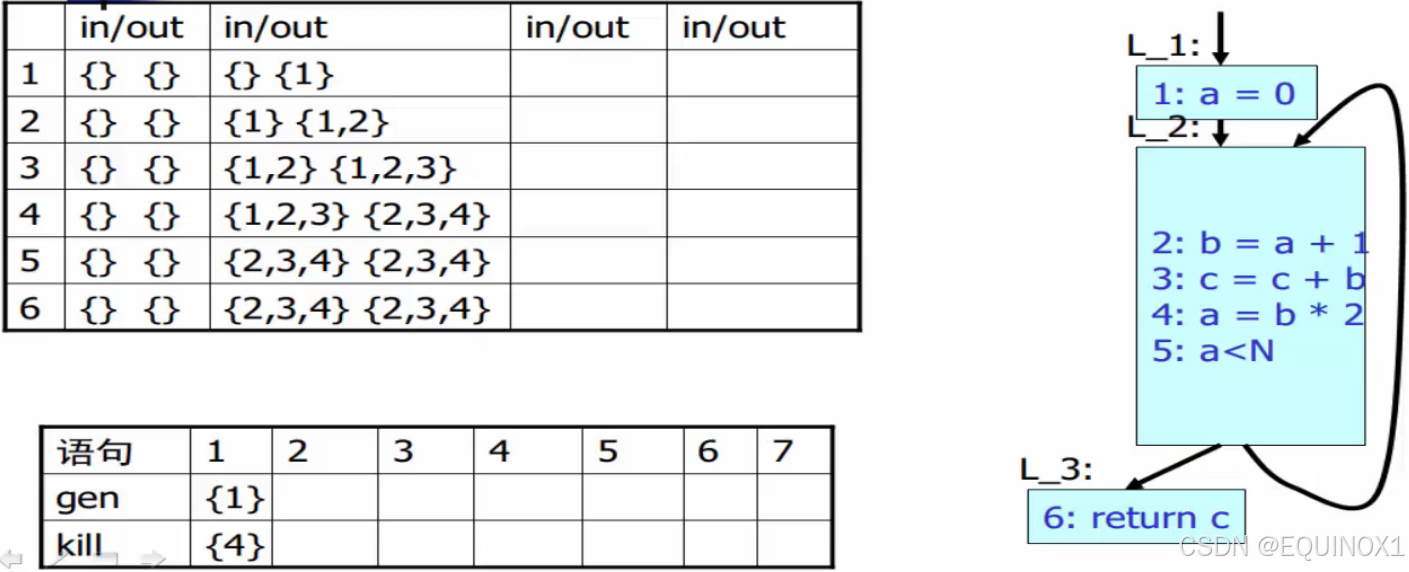
4.3 到达定义分析
4.3.1 定义、使用
定义(def):对变量的赋值
- y = 3
使用(use):对变量值的读取
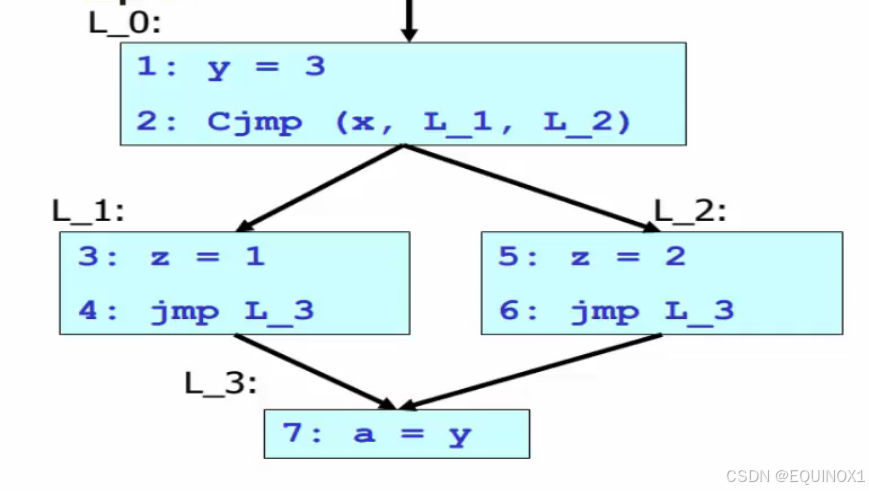
需要回答的问题:有哪些对变量 y 的定义能够到达语句7
- 语句1
到达定义:对每个变量的使用点,有哪些定义可以到达?(即:该变量的值是在哪赋值的?)
- 如果说变量的定义为常数,并且可以到达的使用点只有一个,那么就可以常量传播优化
4.3.2 数据流方程
对任何一条定义:
- [d: x = …]
给出两个集合:
- gen[d: x= …] = { d }
- gen 为产生定义的标号集合
- 如 gen[1: x = 1] = { 1 }
- kill [d: x = …] = defs[x] - {d}
- defs[x] 为 x 的所有定义点集合
- defs[x] - {d},亦即,除了自身,其他所有的定义点都会被当前这个定义点杀死,因为后面紧接着的语句只会见到自己
数据流方程:
- i n [ s i ] = o u t [ s i − 1 ] in[s_i] = out[s_{i - 1}] in[si]=out[si−1]
- o u t [ s i ] = g e n [ s i ] ∪ ( i n [ s i ] − k i l l [ s i ] ) out[s_i] = gen[s_i] \cup (in[s_i] - kill[s_i]) out[si]=gen[si]∪(in[si]−kill[si])
i n [ s i ] in[s_i] in[si]: 能够到达 s i s_i si 的定义集合
o u t [ s i ] out[s_i] out[si]: 能够从 s i s_i si 出去的定义集合
4.3.3 从数据流方程到算法
算法:对一个基本块的到达定义算法
输入:基本块中所有的语句
输出:对每个语句计算 in 和 out 两个集合
List_t stms; // 一个基本块中所有语句
set = {}; // 临时变量,记录当前语句s的in集合
reaching_defination ()
foreach (s ∈ stms)
in[s] = set;
out[s] = gen[s] ∪ (in[s] - kill[s])
set = out[s]
算法非常简单,不再赘述
4.3.4 对于一般的控制流图
对于一般的控制流图,一个节点的会有多个前驱节点:
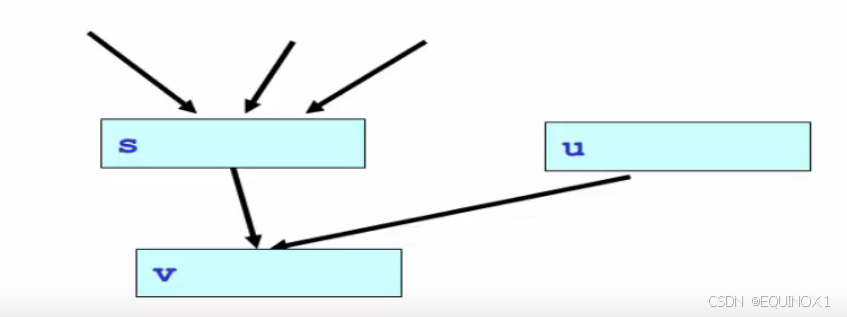
- 前向数据流方程:
- i n [ s ] = ∪ p ∈ p r e d ( s ) o u t [ p ] in[s] = \cup_{p \in pred(s)} \ out[p] in[s]=∪p∈pred(s) out[p]
- o u t [ s ] = g e n [ s ] ∪ ( i n [ s ] − k i l l [ s ] ) out[s] = gen[s] \ \cup (in[s] - kill[s]) out[s]=gen[s] ∪(in[s]−kill[s])
4.3.5 从数据流方程到不动点算法
算法:对所有基本块的到达定义算法
输入:基本块中所有的语句
输出:对每个语句计算 in 和 out 两个集合
List_t stms; // 所有基本块中所有语句
set = {}; // 临时变量,记录当前语句s的in集合
reaching_defination ()
while (some set in[] or out[] is still changing)
foreach (s ∈ stms)
set ∪= out[p];
in[s] = set;
out[s] = gen[s] ∪ (in[s] - kill[s]);
示例:
对于为什么一定能够找到不动点,程序终止,这里不做讨论。
五、中间表示:活性分析
5.1 进行活性分析的动机
- 在代码生成的讨论中,我们曾假设目标机器有无限多个(虚拟)寄存器可用
- 简化了代码生成的算法
- 对物理机器是个坏消息
- 机器只有有限多个寄存器
- 必须把无限多个虚拟寄存器分配到有限个寄存器中
- 机器只有有限多个寄存器
- 这是寄存器分配优化的任务
- 需要进行活性分析
示例
考虑这段三地址码:
a = 1
b = a + 2
c = b + 3
return c
-
有三个变量a,b,c
-
假设目标机器上只有一个物理寄存器:r
-
是否可能把三个变量a,b,c同时放到寄存器r中?
-
我们自然不能同时把 a,b,c放入r中,但是上述程序中我们显然可以利用一个寄存器r 得出结果c
-
三个变量分阶段,交替使用 r 即可
引出的问题:计算在给定的程序点,哪些变量是”活跃“的
- **活跃:**占用寄存器
活跃信息给出了活跃区间的概念。
活跃区间互不相交,所以三个变量可交替使用同一个寄存器。
示例
考虑这段三地址码
a = 1 寄存器分配:
b = a + 2 a => r
c = b + 3 b => r
return c c => r
代码重写:
r = 1
r = r + 2
r = r + 3
return r
5.2 数据流方程
对任何一条语句:
[d: s]
给出两个集合:
- use[d: s] = { x | 变量x在语句s中被使用 }
- def[d: s] = { x | 变量x在语句s中被定义 }
比如:
1: x = y + z
2: z = z + x
use[1] = {y, z}
def[1] = {x}
基本块内的后向数据流方程:
- o u t [ s i ] = i n [ s i + 1 ] out[s_i] = in[s_{i+1}] out[si]=in[si+1]
- i n [ s i ] = u s e [ s i ] ∪ ( o u t [ s i ] − d e f [ s i ] ) in[s_i] = use[s_i] \ \cup (out[s_i] - def[s_i]) in[si]=use[si] ∪(out[si]−def[si])
根据这样的后向数据流方程,我们可以倒推出每一条语句的活跃变量
如示例中的程序,我们可以做出如下推导:
o
u
t
=
∅
1
、
a
=
1
i
n
=
∅
o
u
t
=
{
a
}
2
、
b
=
a
+
2
i
n
=
a
o
u
t
=
{
b
}
3
、
c
=
b
+
3
i
n
=
{
b
}
o
u
t
=
{
c
}
4
、
r
e
t
u
r
n
c
i
n
=
{
c
}
o
u
t
=
∅
\begin{align} & out=\empty \\ & 1、a = 1 \ \ \ \ \ \ \ \ in = \empty \\ & out=\{a\} \\ & 2、b = a + 2 \ \ \ \ \ \ \ \ in= {a} \\ & out=\{b\} \\ & 3、c = b + 3 \ \ \ \ \ \ \ \ in=\{b\} \\ & out=\{c\} \\ & 4、return \ c \ \ \ \ \ \ \ in=\{c\}\\ & out=\empty \end{align}
out=∅1、a=1 in=∅out={a}2、b=a+2 in=aout={b}3、c=b+3 in={b}out={c}4、return c in={c}out=∅
再给一个示例:
out = {}
a = 1 in = {} c b a
out = {a} |
b = a + 2 in = {a} |
out = {a, b} | |
c = b + 3 in = {a, b} | |
out = {a, c} | |
return a + c in = {a, c} | |
out = {} | |
我们发现在上述程序中:
- a 始终活跃
- b、c分别处于两段不相交的活跃区间
- 因而a需要分配一个寄存器,b、c可以交替使用同一个寄存器
5.3 一般的数据流方程
- 方程
- o u t [ s ] = ∪ p ∈ s u c c [ s ] i n [ p ] out[s] = \cup_{p \in succ[s]} in[p] out[s]=∪p∈succ[s]in[p]
- i n [ s ] = u s e [ s ] ∪ ( o u t [ s ] − d e f [ s ] ) in[s] = use[s] \cup (out[s] - def[s]) in[s]=use[s]∪(out[s]−def[s])
- 同样可给出不动点算法
- 从初始的空集{ }出发
- 循环到没有集合变化为止
5.4 干扰图
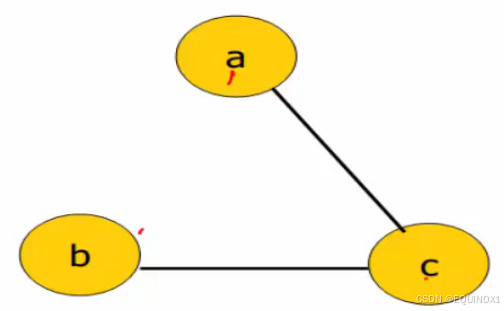
-
干扰图是一个无向图G = (V,E):
- 对每个变量构造无向图G中一个节点;
- 若变量x,y同时活跃,在x、y间连一条无向边。
-
显然,连边的两个节点不能够共用寄存器
-
这其实就转化为了图论中独立集的问题
-
我们对顶点进行着色,任意两个相连点颜色不同
-
下一章寄存器分配会用到该数据结构,并通过启发式图着色来解决问题


















 3065
3065

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











