






永磁同步电机(pmsm)模型预测控制(MPC)matla b/simulink仿真模型,有PI矢量控制,直接预测控制(有限集模型预测控制)(这个其中包括做了单矢量和双矢量或者可以成为三矢量的有限集预测控制)和无差拍预测控制,模型预测控制可以是单环模型预测控制和双环模型预测控制,(基于龙伯格负载观测器)(foc控制)转矩
ID:8580659746113259
番***4
标题:永磁同步电机模型预测控制技术及其在MATLAB Simulink仿真中的应用
摘要:本文以永磁同步电机(PMSM)为研究对象,重点探讨其模型预测控制(MPC)技术在MATLAB Simulink仿真中的应用。我们将介绍PI矢量控制和直接预测控制,并在其中展开了有限集模型预测控制的讨论。此外,我们还对无差拍预测控制进行了研究。最后,我们将详细介绍单环模型预测控制和双环模型预测控制,并基于龙伯格负载观测器提供了转矩控制方案。
-
引言
永磁同步电机(PMSM)作为一种高效能、高性能的传动设备,被广泛应用于电动汽车、工业机械等领域。为了实现对其转矩和速度的高精度控制,模型预测控制技术被引入。 -
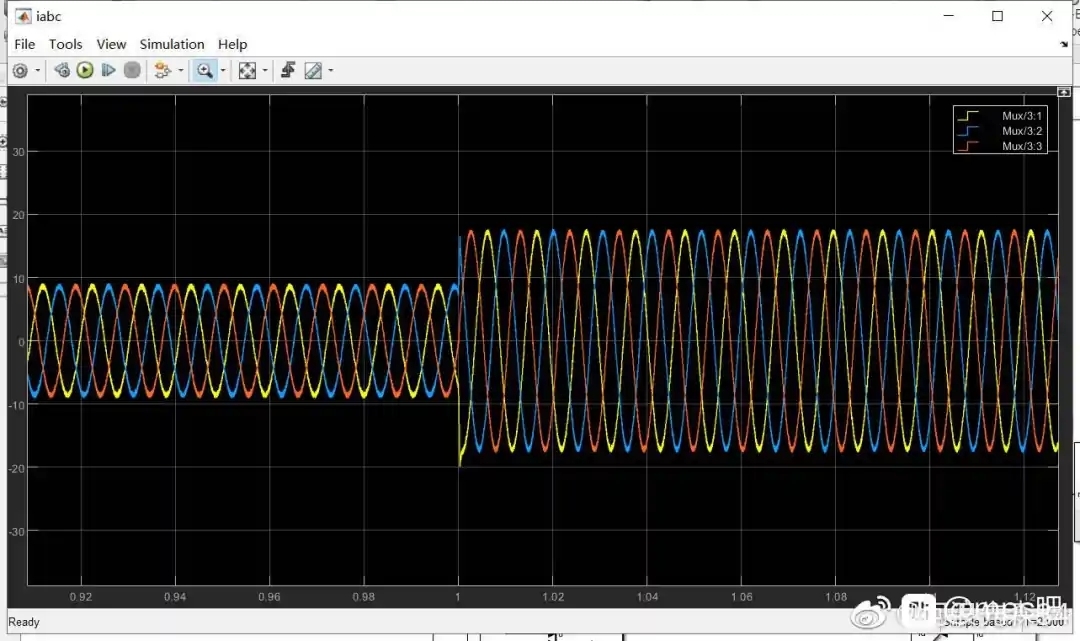
PI矢量控制
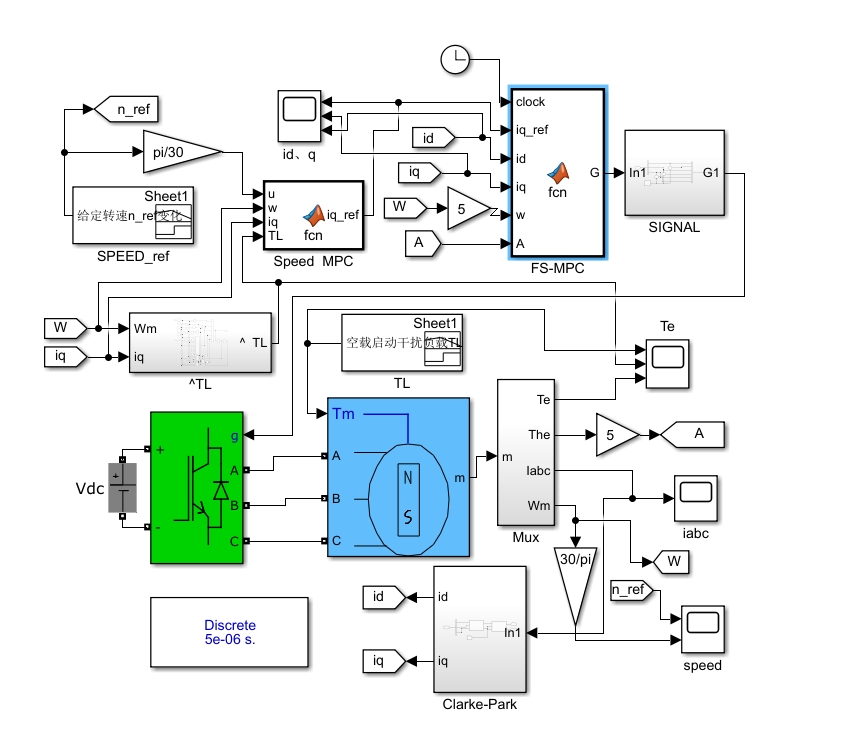
PI矢量控制是一种常用的PMSM控制策略,其通过调整电机的电流矢量来实现对其转矩和速度的控制。本节将详细介绍PI矢量控制的原理和实现方式,并给出相应的MATLAB Simulink仿真模型。 -
直接预测控制
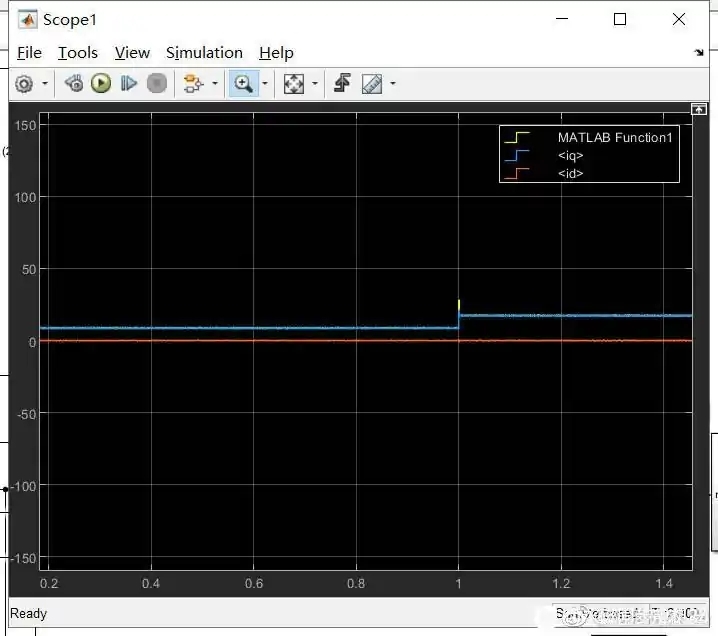
直接预测控制是一种基于模型的控制策略,通过建立电机的数学模型,预测未来一段时间内的电机行为,并根据预测结果进行控制。本节将介绍直接预测控制的原理和实现方法,并结合MATLAB Simulink提供仿真模型。 -
有限集模型预测控制
有限集模型预测控制是直接预测控制的一种改进方法,通过将控制输入和状态变量限制在一个有限的集合中,以降低计算复杂度。本节将在直接预测控制的基础上,详细讨论有限集模型预测控制的原理和实现方式。 -
无差拍预测控制
无差拍预测控制是一种用于PMSM的非线性控制方法,通过在优化问题中引入差拍和非线性约束,实现对电机转矩和速度的控制。本节将对无差拍预测控制进行深入研究,并提供相应的MATLAB Simulink仿真模型。 -
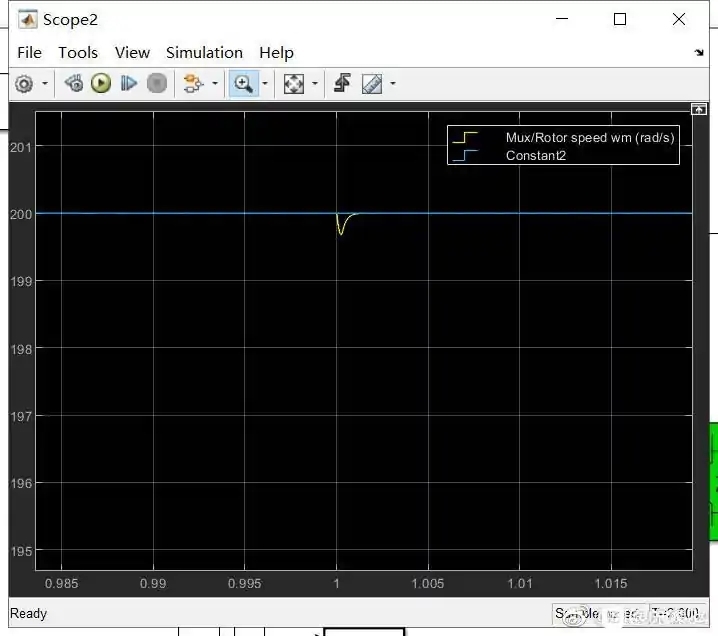
单环模型预测控制与双环模型预测控制
单环模型预测控制和双环模型预测控制是模型预测控制的两种常用形式,它们通过不同的环路设计实现对电机的转矩和速度的控制。本节将详细介绍单环模型预测控制和双环模型预测控制的原理和实现方式,并结合实例演示其在PMSM中的应用。 -
基于龙伯格负载观测器的转矩控制
基于龙伯格负载观测器的转矩控制是一种常用的PMSM转矩控制方法,其通过观测负载转矩来实现对电机转矩的高精度控制。本节将详细介绍基于龙伯格负载观测器的转矩控制原理,并给出相应的MATLAB Simulink仿真模型。 -
结论
本文通过对永磁同步电机模型预测控制技术的研究和应用,详细介绍了PI矢量控制、直接预测控制、有限集模型预测控制和无差拍预测控制等多种控制策略在PMSM中的应用。同时,本文还提供了MATLAB Simulink仿真模型,方便读者在实际应用中进行验证和实验。
关键词:永磁同步电机,模型预测控制,PI矢量控制,直接预测控制,有限集模型预测控制,无差拍预测控制,单环模型预测控制,双环模型预测控制,龙伯格负载观测器,转矩控制,MATLAB Simulink仿真模型。
相关的代码,程序地址如下:http://coupd.cn/659746113259.html
















 1185
1185











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









