







9月12日,由商汤绝影「绝世高手」联合行业自媒体「汽车之心」行家说栏目,邀请到重磅嘉宾:上海人工智能实验室青年科学家李弘扬、青年科学家蔡品隆,商汤研究院研发总监卢乐炜、商汤研究院算法研究员邓瀚铭,一同与大家分享《从 UniAD 到智驾 AGI,解读智驾新趋势》,深入解读 UniAD 技术亮点,探讨智驾未来行业新趋势。
以下为本次直播内容整理总结:
自动驾驶大模型研发思路
最近商汤及联合实验室的论文《Planning-oriented Autonomous Driving(UniAD)》(以路径规划为导向的自动驾驶)获得了2023 CVPR Best paper。
商汤研究院和上海人工智能实验室 OpenDrive Lab 在过去一年的时间里贡献了许多在自动驾驶领域的工作成果,比如 BEV Former、Persformer、Occupancy Network 等工作。
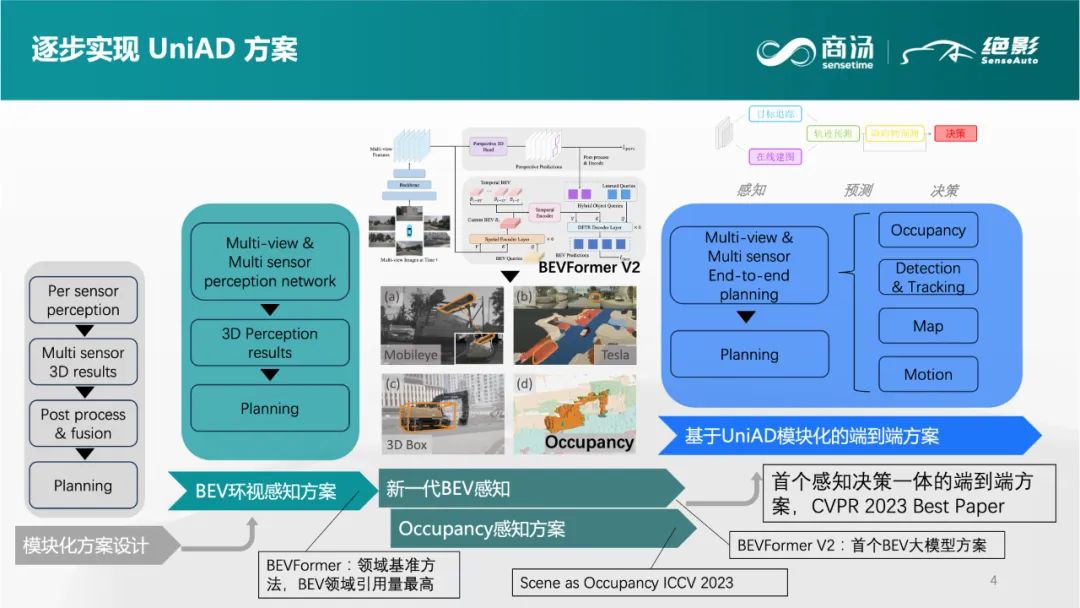
团队最早从 deformable、DTR 等领域着手,随着研究的深入,我们也希望深耕自动驾驶技术。基于此,我们率先提出了业内较早的环视感知算法方案 BEV Former,也成为行业内的 baseline 方案,并且有着较高的引用量。
此后我们沿用此路线,提出了业内首个结合大模型的 BEV Former V2 解决方案,而我们的 BEVFormer++ 算法也在 Waymo 纯视觉 3D 检测挑战赛中斩获第一,BEVFormer V2 的相关研究成果在自动驾驶 nuScenes 数据集的 3D 检测任务上也创造了新的纪录。同时,我们也是业内较早提出的 Occupancy Network 解决方案的团队。
基于以上的工作,我们开始探索感知决策一体化的端到端算法框架。
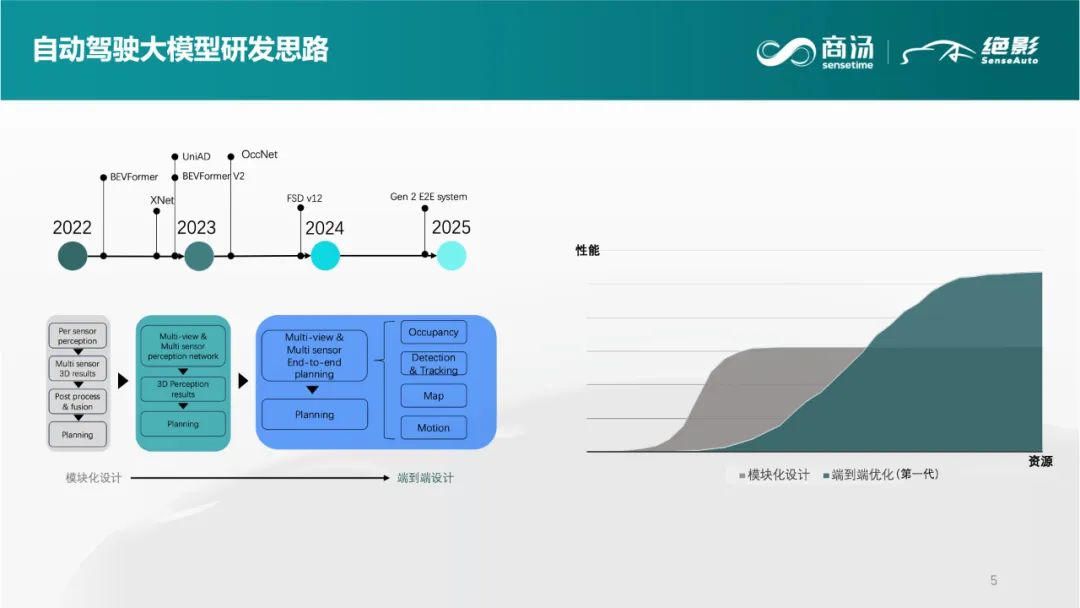
现有的是自动驾驶研发工作都集中于单一模块,各模块之间优化误差会传递到下一个模块,导致最终自动驾驶系统效果与设定目标有所偏差,同时随着自动驾驶的发展和应用,传统的自动驾驶系统并不能够利用越来越海量的数据实现优化。而端到端算法框架能够结合感知和规划算法,利用海量数据,实现更好的提升。我们希望基于 UniAD,能够推动自动驾驶从模块化设计到端到端设计的研发趋势。
首个感知决策一体化自动驾驶通用大模型 UniAD
-
模块化研发
现有自动驾驶系统的研发分为感知、预测、规控等主要模块的研发,各模块件的研发都是相对独立的,优化指标并不相同。如目标检测的指标是平均精度(mAP:mean Average Precision),而预测的评测指标是终点位移误差(minFDE:Minimum Final displacemen
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









