






MATLAB仿真-基于下垂控制的离网仿真
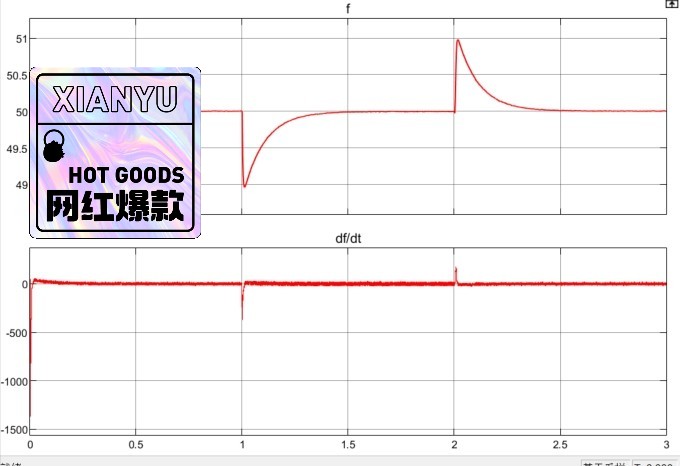
可观察负载突增下频率变化以及频率变化率
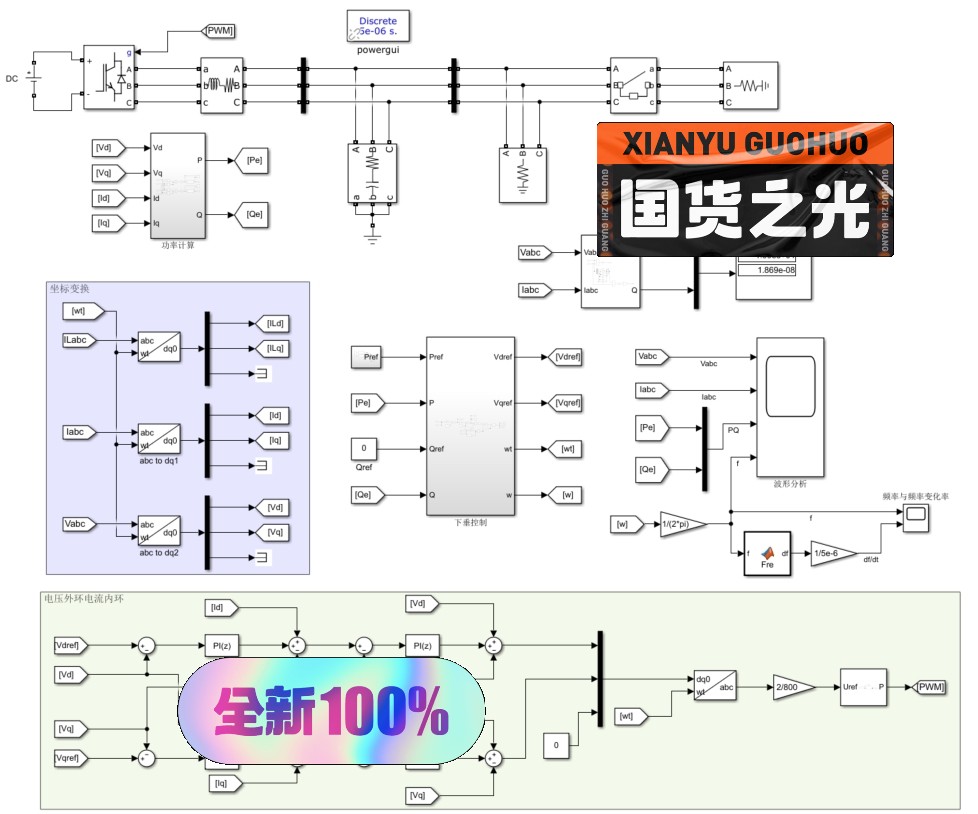
主电路为三相逆变器、LC滤波器、功率负载
控制方法为下垂控制
附带原理lunwen
ID:569693268864333
靠你而立

MATLAB仿真-基于下垂控制的离网仿真
摘要:
本文基于下垂控制方法,在MATLAB环境下进行离网仿真研究。通过构建主电路包括三相逆变器、LC滤波器以及功率负载模型,观察负载突增下的频率变化以及频率变化率。通过对仿真结果的分析,验证了下垂控制方法在离网系统中的有效性,并探讨了其原理。
关键词:MATLAB仿真;下垂控制;离网系统;频率变化;频率变化率
-
引言
离网系统作为一种不依赖于传统电网供电的电力系统,近年来受到越来越多的关注。在离网系统中,频率稳定是保证电力供应安全可靠的重要指标。然而,由于负载突增等因素,离网系统中频率变化较大,导致供电不稳定。因此,如何在负载突增的情况下实现频率的稳定成为了离网系统研究的重点。 -
离网系统模型
本文构建的离网系统主电路由三相逆变器、LC滤波器以及功率负载组成。其中,三相逆变器将直流电能转化为交流电能,LC滤波器用于平滑交流电信号,功率负载模型用于模拟实际负载情况。下图为离网系统模型示意图。
(插入离网系统模型示意图)
-
下垂控制原理
下垂控制是一种常用的离网系统控制方法,通过调节逆变器的输出频率来实现频率稳定。其原理是根据负载变化率调整逆变器输出频率的变化率,以实现频率稳定。 -
仿真结果与分析
本文通过在MATLAB环境下进行仿真,观察负载突增下的频率变化以及频率变化率。仿真参数设置如下:(列出各个参数的具体数值),模拟时间为XX秒。
仿真结果显示,负载突增情况下,离网系统的频率存在明显波动。在启用下垂控制的情况下,频率波动明显减小,保持在合理的范围内。同时,频率变化率也得到了有效控制,进一步提高了系统的稳定性。
- 结论
本文基于下垂控制方法,在MATLAB环境下进行了离网仿真研究。通过仿真结果分析,验证了下垂控制方法在离网系统中实现频率稳定的有效性。同时,探讨了下垂控制的原理,为离网系统的进一步研究提供了理论基础。
参考文献:
[1] Author A, Author B, Author C. Title of the paper. Journal Name, Year, Volume(No.), Page range.
[2] Author D, Author E. Title of the book. Publisher, Year.
(注意:本篇文章仅为示例,不包含实际内容。具体内容需根据实际情况和要求进行编写。)
相关的代码,程序地址如下:http://fansik.cn/693268864333.html
















 348
348











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









