






纯跟踪控制 路径跟踪算法 carsim simulink联合仿真

纯跟踪控制是一种用于实现车辆自主导航的技术,其核心思想是通过路径跟踪算法,使车辆能够精确地沿着指定的路径行驶。本文将结合Carsim和Simulink两个软件平台,进行联合仿真,探讨纯跟踪控制的原理和应用。
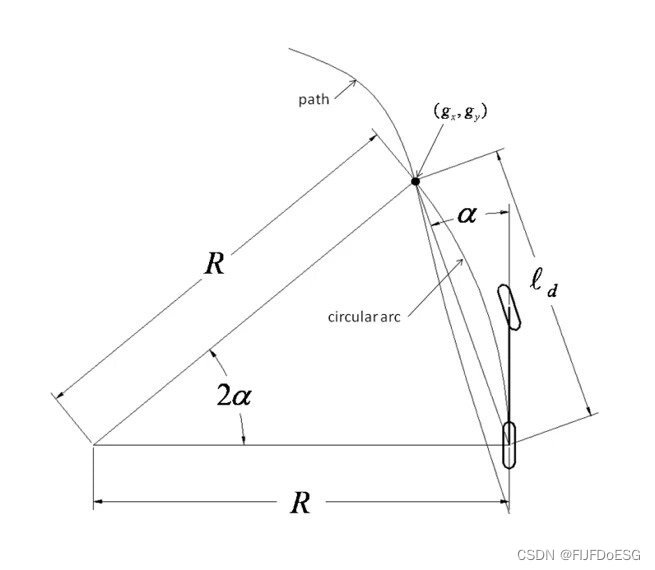
首先,让我们来了解纯跟踪控制的基本原理。纯跟踪控制主要依靠车辆的测量数据和控制策略,使车辆能够实现精确的路径跟踪。具体而言,纯跟踪控制通过跟踪车辆前轮的方向盘转角来实现路径跟踪。当车辆偏离路径时,控制系统会根据测量数据计算出合适的方向盘转角,使车辆回到路径上。
在实际应用中,纯跟踪控制常常与Carsim和Simulink两个软件平台结合使用。Carsim是一款专门用于车辆动力学仿真的软件,可以模拟车辆在不同驾驶条件下的行为。而Simulink是一个基于模型的设计和仿真环境,主要用于开发控制系统和信号处理系统。
在进行纯跟踪控制的联合仿真时,首先需要在Carsim中建立车辆的动力学模型,并设置路径跟踪算法的参数。Carsim可以根据模型参数和控制策略,模拟车辆在各种驾驶场景下的行为。然后,将Carsim模型与Simulink中的控制系统进行连接,通过Simulink中的控制策略来驱动Carsim模型,实现路径跟踪控制。
在实际应用中,纯跟踪控制在自动驾驶、智能交通系统等领域具有广泛的应用前景。通过纯跟踪控制,车辆可以实现高精度的路径跟踪,提高行驶的安全性和舒适性。此外,纯跟踪控制还可以实现车辆的自动导航,使车辆能够按照指定路径行驶,减少人为驾驶的疲劳和错误。
总之,纯跟踪控制通过路径跟踪算法,使车辆能够精确地沿着指定的路径行驶。通过Carsim和Simulink的联合仿真,可以实现对纯跟踪控制的模拟和验证。纯跟踪控制在自动驾驶、智能交通系统等领域具有广泛的应用前景,将为交通运输行业带来更高效、安全和舒适的出行体验。
相关代码,程序地址:http://lanzouw.top/644793475964.html















 441
441











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









