







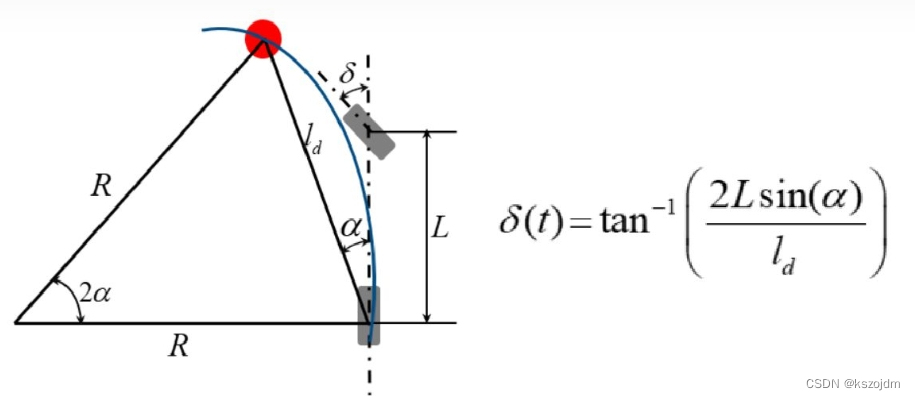
(工程项目线上支持)预瞄跟踪控制算法,单点或多点驾驶员模型,横制,纯跟踪算法。
carsim和MATLAB Simulink联合仿真。
附建模说明书
YID:1668653258049334
首先,预瞄跟踪控制算法是指在行驶过程中对车辆的状态进行预测,并通过控制算法进行调整,从而实现更加精准和安全的行驶。该算法可以分为两种类型:基于状态的预测和基于模型的预测。基于状态的预测通常使用车辆的状态信息(例如位置、速度、横向加速度等)来进行预测,并使用控制算法进行调整。基于模型的预测则是使用车辆的动力学模型和环境信息进行预测,并进行控制。需要注意的是,预测精度和计算速度是预瞄跟踪控制算法的重要指标,需要在准确性和实时性之间进行平衡。
其次,单点或多点驾驶员模型也是工程项目线上支持的重要技术之一。该模型通常包括驾驶员的行为模型、感知模型和决策模型。其中,行为模型是指驾驶员在行驶过程中的行为表现;感知模型是指驾驶员对周围环境的感知能力;决策模型则是指驾驶员在面对不同的情
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 567
567











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









