







#include <iostream>
using namespace std;
#include <map>
#include <string>
#include <memory>
#include <boost/signals2.hpp>
using namespace boost::signals2;
#include <functional>
#include <windows.h>
#include <mutex>
class TyService;
class TyService_Manager
{
private:
TyService_Manager() = default;
public:
static auto GetInstance()
{
TyService_Manager s;
return &s;
}
void RegisterService(string strService,std::shared_ptr<TyService> spService)
{
m_mapServices[strService] = spService;
}
auto GetService(string strServicename)->std::shared_ptr<TyService>
{
auto it = m_mapServices.find(strServicename);
if (it != m_mapServices.end())
{
return it->second;
}
else
{
return nullptr;
}
}
private:
static map<string, std::shared_ptr<TyService> > m_mapServices;
};
map<string, std::shared_ptr<TyService> > TyService_Manager::m_mapServices;
using MySingal = signal<void()>;
#define InitClassName(strName)\
public:\
string GetServiceName() override { return strName;} \
static string GetServiceName_S(){return strName;}
//服务基类,后来者可以继承这个类实现自己的一些操作
class TyService :public enable_shared_from_this<TyService>
{
public:
void RegisterService()
{
auto pInstance = TyService_Manager::GetInstance();
string name = GetServiceName();
pInstance->RegisterService(name, GetThis());
}
public:
virtual string GetServiceName() = 0;
virtual bool InitService() = 0;
virtual ~TyService(){}
std::shared_ptr<TyService> GetThis()
{
return shared_from_this();
}
protected:
std::once_flag ms_onceflag;
public:
std::map<int, MySingal> m_mapSingals;
};
//示例
class PSBatch :public TyService
{
InitClassName("PSBatch");
public:
enum MyEnum
{
eidClick,
eidDbClick,
};
~PSBatch()
{
}
public:
bool InitService() override
{
cout << "我已经初始化了!\n";
return true;
}
public:
void TestMsg(int nSig)
{
m_mapSingals[nSig]();
}
};
void connect_message(std::shared_ptr<TyService> spService, int nsignal, std::function<void()> fun)
{
spService->m_mapSingals[nsignal].connect(fun); \
}
template<typename T>
void ConnectService(std::shared_ptr<T>& sp)
{
string strname = sp->GetServiceName_S();
auto pInstance = TyService_Manager::GetInstance();
std::shared_ptr<TyService> p = pInstance->GetService(strname);
sp = std::dynamic_pointer_cast<T>(p);
}
void Register_Service(std::shared_ptr<TyService> spService)
{
spService->RegisterService();
}
//消息映射
#define CONNECT_MESSAGE(spService,nSig,fun)\
connect_message(spService,nSig,fun);
//连接服务
#define CONNECT_SERVICE(spService)\
ConnectService(spService);
//登记服务,只有登记后才可连接服务
#define REGISTER_SERVICE(spService)\
Register_Service(spService);
class test1
{
public:
test1()
{
sp = std::make_shared<PSBatch>();
REGISTER_SERVICE(sp);
CONNECT_MESSAGE(sp, sp->eidClick, std::bind(&test1::OnMsg,this));
}
void OnMsg()
{
cout << "test1::OnMsg()\n";
}
//模拟一次点击事件
void OnClick()
{
cout << "点击事件触发\n";
sp->TestMsg(sp->eidClick);
}
private:
shared_ptr<PSBatch> sp;
};
class test2
{
public:
test2()
{
CONNECT_SERVICE(sp2);
CONNECT_MESSAGE(sp2, sp2->eidClick, std::bind(&test2::OnMsg, this));
}
void OnMsg()
{
cout << "test2::OnMsg()\n";
}
private:
shared_ptr<PSBatch> sp2;
};
int main()
{
test1 t1;
test2 t2;
Sleep(2000);
t1.OnClick();
system("pause");
return 0;
}
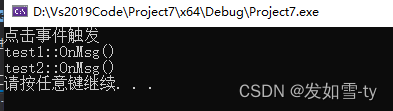
执行结果:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











