







 超级会员免费看
超级会员免费看
论文解析
论文《Design Optimization of Musculoskeletal Humanoids with Maximization of Redundancy to Compensate for Muscle Rupture》由 Kento Kawaharazuka 等人撰写。论文提出一种优化肌肉骨骼机器人身体设计的方法,通过最大化冗余来补偿肌肉断裂,提高机器人在肌肉受损情况下的运动能力。
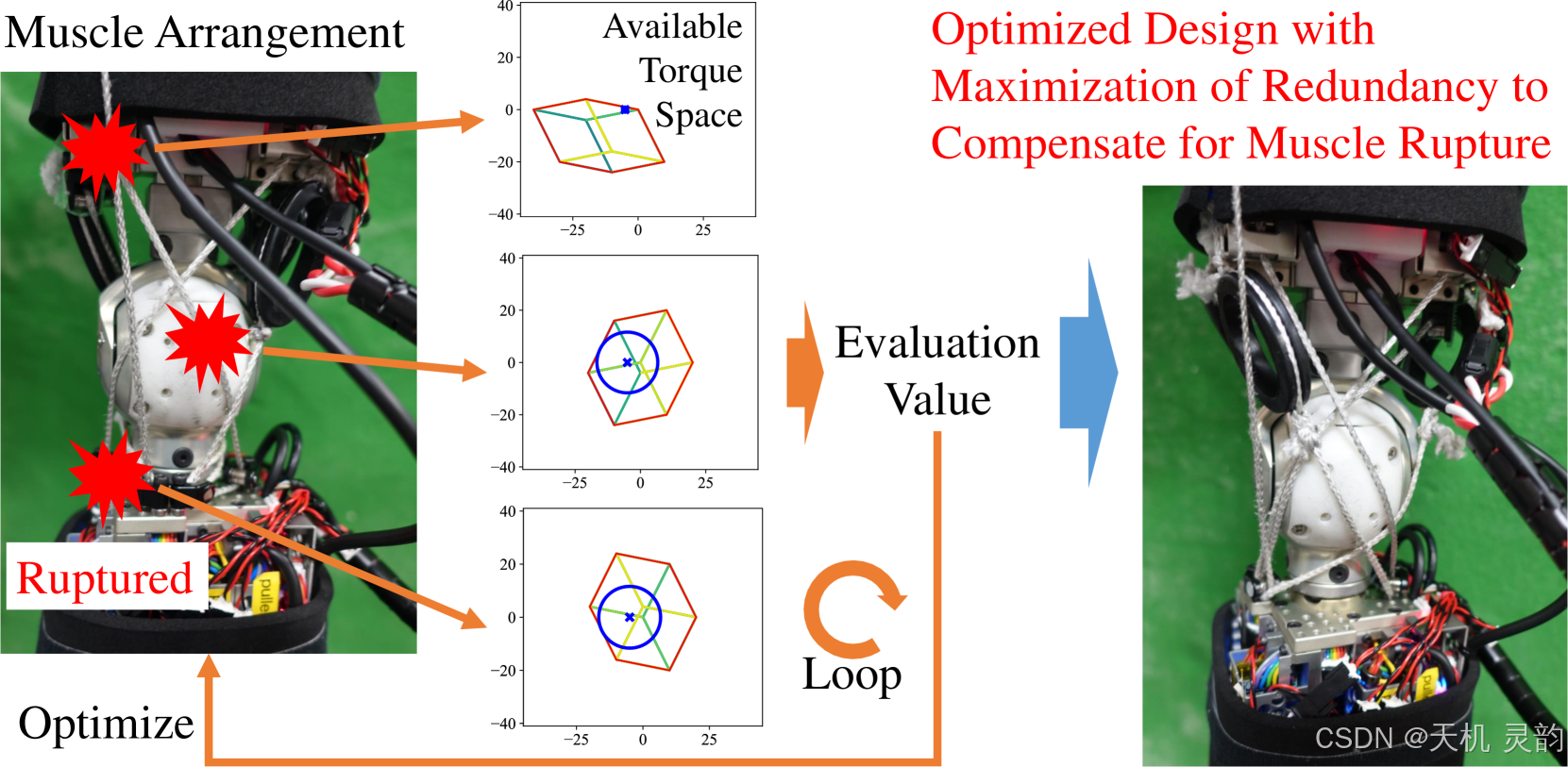
- 研究背景:肌肉骨骼机器人的冗余肌肉排列有诸多优势,但肌肉断裂时机器人维持运动的能力研究较少。本研究旨在开发一种优化身体设计的方法,最大化冗余以补偿肌肉断裂。
- 肌肉骨骼机器人结构:肌肉围绕关节冗余排列,分为主动肌和拮抗肌。肌肉骨骼机器人有多种类型,本研究使用的 Musashi 机器人采用电机驱动,具有复杂肌肉骨骼结构和可变力臂。
- 设计优化方法
- 计算 RITS:RITS 用于评估冗余度,通过求解在肌肉张力和关节扭矩约束下的超球半径得出,算法包括计算超立方体顶点投影、凸包、中心,以及到超平面的距离等步骤。

 订阅专栏 解锁全文
订阅专栏 解锁全文




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











