






第一章 绪论
数据结构的概念(逻辑结构 存储结构 数据运算)
数据类型……
算法:五大特性:有穷性 确定性 可行性 输入 输出
算法分析:时间复杂度(时间数量级) 空间复杂度(主要是临时存储空间)
第二章 线性表
顺序表 链表(单链表 双链表 循环链表)
第三章 栈与队列
顺序栈 链栈 顺序队列 链队列 双端队列
中缀表达式(数学中使用的)1 + 2 * 3 ,运算符左右两边数字与运算符相计算;
中缀表达式可以与以下两种相互转化:
前缀表达式 + 1 * 2 3 ,运算符右边两位数字与运算符相计算;
后缀表达式 1 2 3 * + ,运算符左边两位数字与运算符相计算。
运用栈的思想,将运算符压入栈中,根据情况出栈。
第四章 串
顺序串 链串
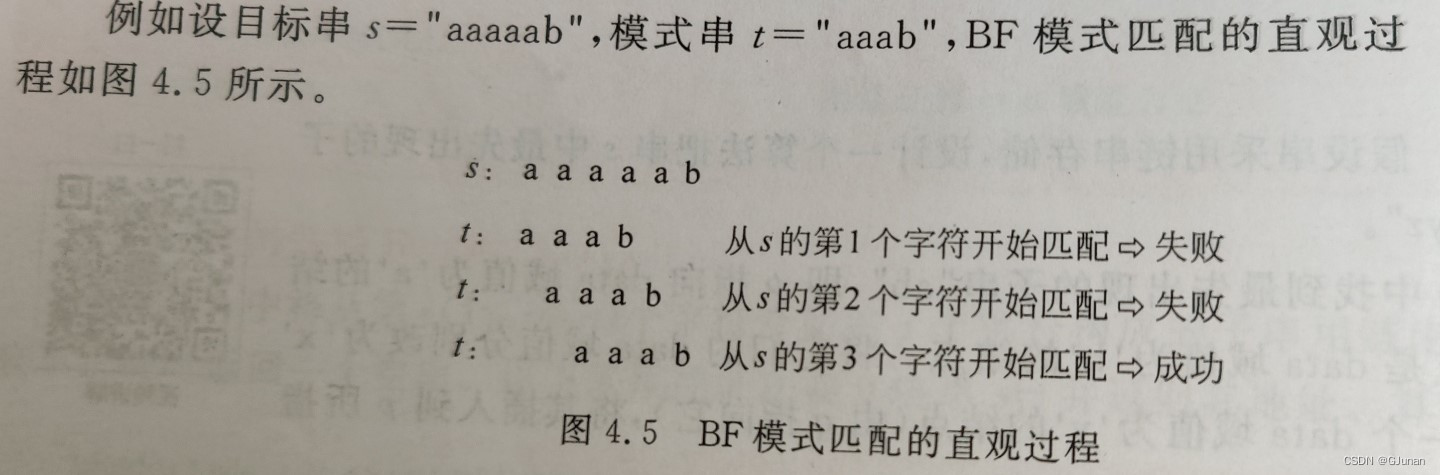
串的模式匹配:
Brute-Force算法: t为模式串,暴力匹配目标串s串
#include <iostream>
#include <string>
using namespace std;
int BF(string s, string t);//Brute-Force算法
int main()
{
string s = "aaaaab";
string t = "aaab";
cout << BF(s, t) << endl;
}
int BF(string s, string t)//Brute-Force算法
{
int i = 0, j = 0;
while (i < s.length() && j < t.length())
{
if (s[i + j] == t[j])
{
j++;
}
else
{
j = 0;
i++;
}
}
if (j >= t.length()) return i + 1;
else return -1;
}KMP算法(Knuth-Morris-Pratt算法):
KMP算法是BF算法的改进,主要消除了主串指针的回溯。
NEXT数组怎么求?手写如图:
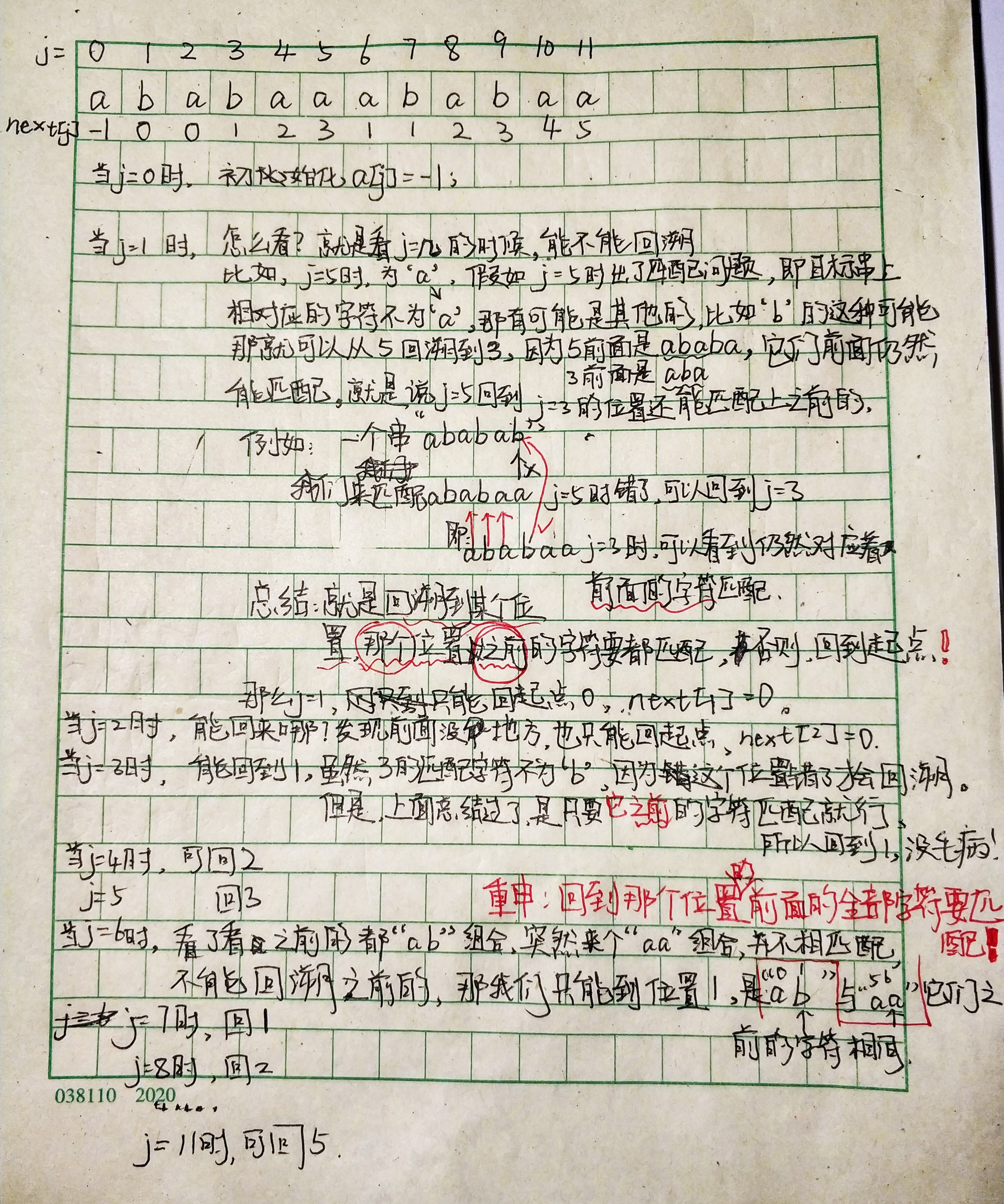
也就是说NEXT数组是模式串出错后回溯到原来具有同样信息的子串的位置上,不判断第j位是否相同,继续匹配,如若出错则继续回溯。(后面的nextval改进了next,减少了冗余判断重复回溯)
#include <iostream>
#include <string>
using namespace std;
void getnext(string t, int NEXT[]);
int KMP(string s, string t);//KMP算法
int main()
{
string s = "aaaaab";
string t = "aaab";
cout << KMP(s, t) << endl;
}
void getnext(string t, int NEXT[])
{
NEXT[0] = -1;
int i = 0, j = -1;
while (i < t.length() - 1)
{
if (j == -1 || t[i] == t[j]) NEXT[++i] = ++j;
else j = NEXT[j];
}
}
int KMP(string s, string t)//KMP算法
{
const int Max_size = 20;
int NEXT[Max_size];
getnext(t, NEXT);
int i = 0, j = 0;
while (i < s.length() && j < t.length())
{
if (j == -1 || s[i] == t[j])
{
i++;
j++;
}
else
{
j = NEXT[j];
}
}
if (j >= t.length()) return i - t.length();
else return -1;
}我们匹配两个串是否存在相等区段,用KMP算法需要先求出NEXT回溯数组,当匹配出错时模式串t向前回溯,优化了BF算法;但是任然存在缺陷,就是没比较t串的第j位置与回溯位置是否匹配,若不匹配,则直接滑动目标串,模式串直接重新开始匹配。
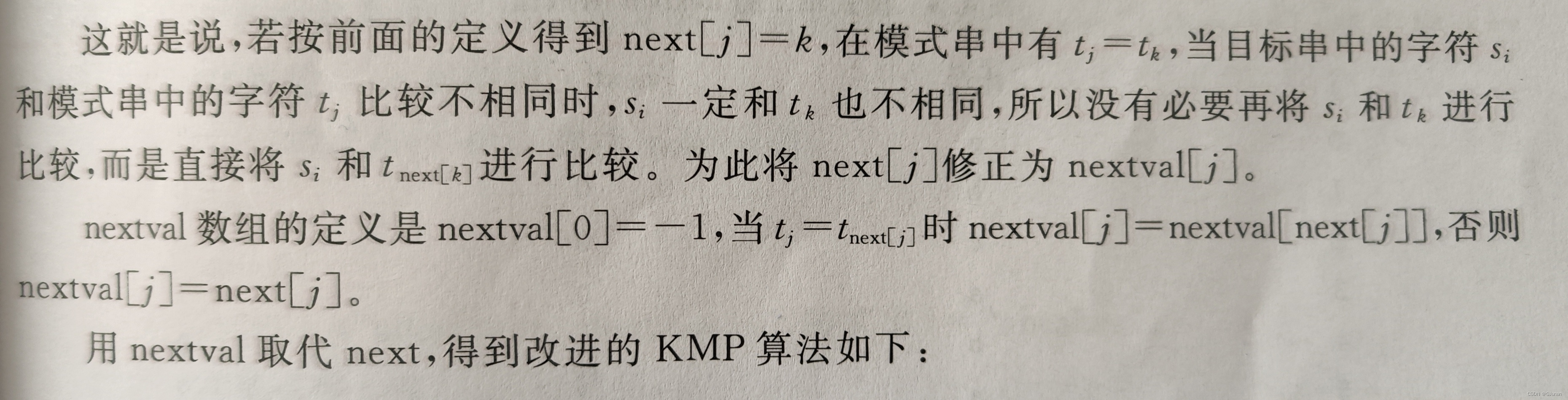
求 NEXTVAL就是在原有NEXT的基础上增加第j位的判断:
void getnextval(string t, int NEXTVAL[])
{
NEXTVAL[0] = -1;
int i = 0, j = -1;
while (i < t.length() - 1)
{
if (j == -1 || t[i] == t[j])
{
i++;
j++;
if (t[i] != t[j]) NEXTVAL[i] = j;
else NEXTVAL[i] = NEXTVAL[j];
}
else
{
j = NEXTVAL[j];
}
}
}第五章 递归
递归分而治之是种思想,我们用它来解决可以转化成子问题的大的复杂问题,建立递归模型(递归体、递归出口),这里就以最经典的汉诺塔为例:
编写一个hanoi函数,传入三根塔柱的字符标识,我们的递归出口就是n=1的情况,递归体就是n>1的情况。我们在面对大规模汉诺塔问题时,只需要采用递归思想,将复杂的问题简单化,
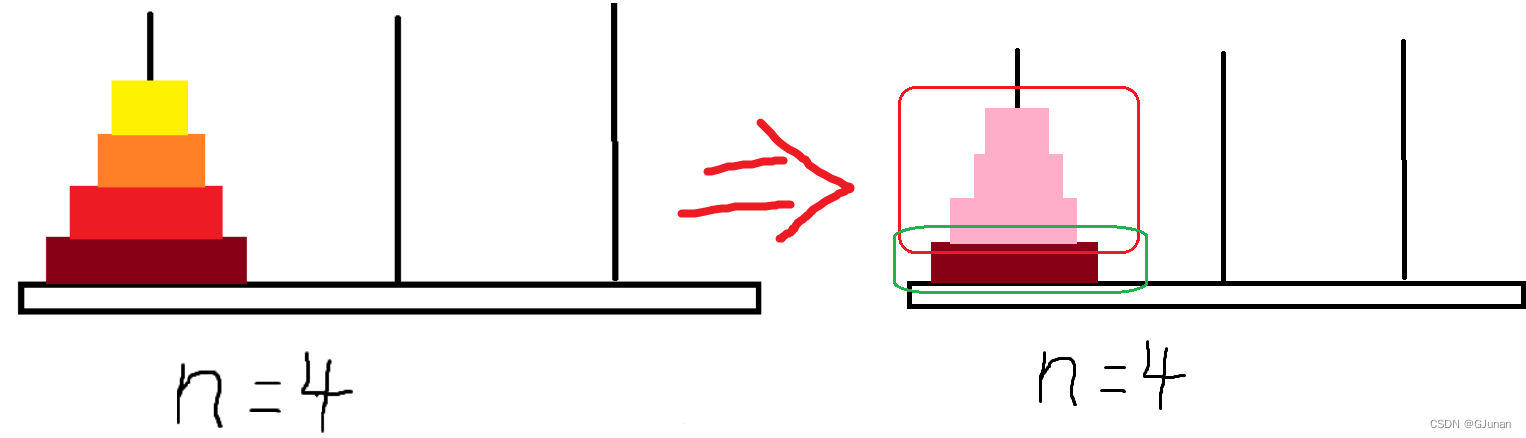
把上层的片都看作整体,这样就把问题简化成n=2的情况,此时我们只需要将大块移动到中间的柱子上,就可以让最长的塔片移动到最右边的目标柱,再将中间的大块组合片移动到最右边,这就完成了递归体的构造:①先让上面的部分移动到中间 ②将最长片移动到目标柱 ③再将中间的盘片移动到目标柱上。
我们的递归出口就是n=1时的情况,只有一个盘片,即将这一个盘片移动到目标柱。
#include <iostream>
using namespace std;
void hanoi(char A, char B, char C, int n);//汉诺塔
int main()
{
int n;
cin >> n;
hanoi('A', 'B', 'C', n);
}
void hanoi(char A, char B, char C, int n)//汉诺塔
{
if (n == 1) cout << A << " -> " << C << endl;
if (n >= 2)
{
hanoi(A, C, B, n - 1);
cout << A << " -> " << C << endl;
hanoi(B, A, C, n - 1);
}
}第六章 数组与广义表
介绍一些特殊的数据结构三元组、十字链表……
第七章 树与二叉树
树的基本数据结构……
树的遍历:先根遍历、层次遍历、后根遍历
二叉树严格区分左右子树,可以为空。
二叉树、树 与 森林 之间的转化。
二叉树的链式存储结构:
typedef int ElemType;
typedef struct node
{
ElemType data; //数据元素
struct node* lchild; //指向左孩子结点
struct node* rchild; //指向右孩子结点
}BTNode; //Binary Tree Node 二叉树结点二叉树的遍历:
递归:
先序遍历:先根遍历,NLR,先访问根节点,先序遍历左子树,先序遍历右子树。
void PreOrder(BTNode* b)//先序遍历
{
if (b != NULL)
{
cout << b->data << endl;
PreOrder(b->lchild);
PreOrder(b->rchild);
}
}中序遍历:LNR,中序遍历左子树,访问根节点,中序遍历右子树。
void InOrder(BTNode* b)//中序遍历
{
if (b != NULL)
{
InOrder(b->lchild);
cout << b->data << endl;
InOrder(b->rchild);
}
}后序遍历:后根遍历,LRN,后序遍历右子树,后序遍历左子树,访问根节点。
void PostOrder(BTNode* b)//后序遍历
{
if (b != NULL)
{
PostOrder(b->lchild);
PostOrder(b->rchild);
cout << b->data << endl;
}
}非递归:
层次遍历逐层从左到右访问左右结点。
二叉树的构造:
先序序列 和 中序序列 或 后序序列 和 中序序列 可以唯一确定二叉树。
线索二叉树:由不同遍历方式创建线索化的二叉树,提高遍历二叉树的效率。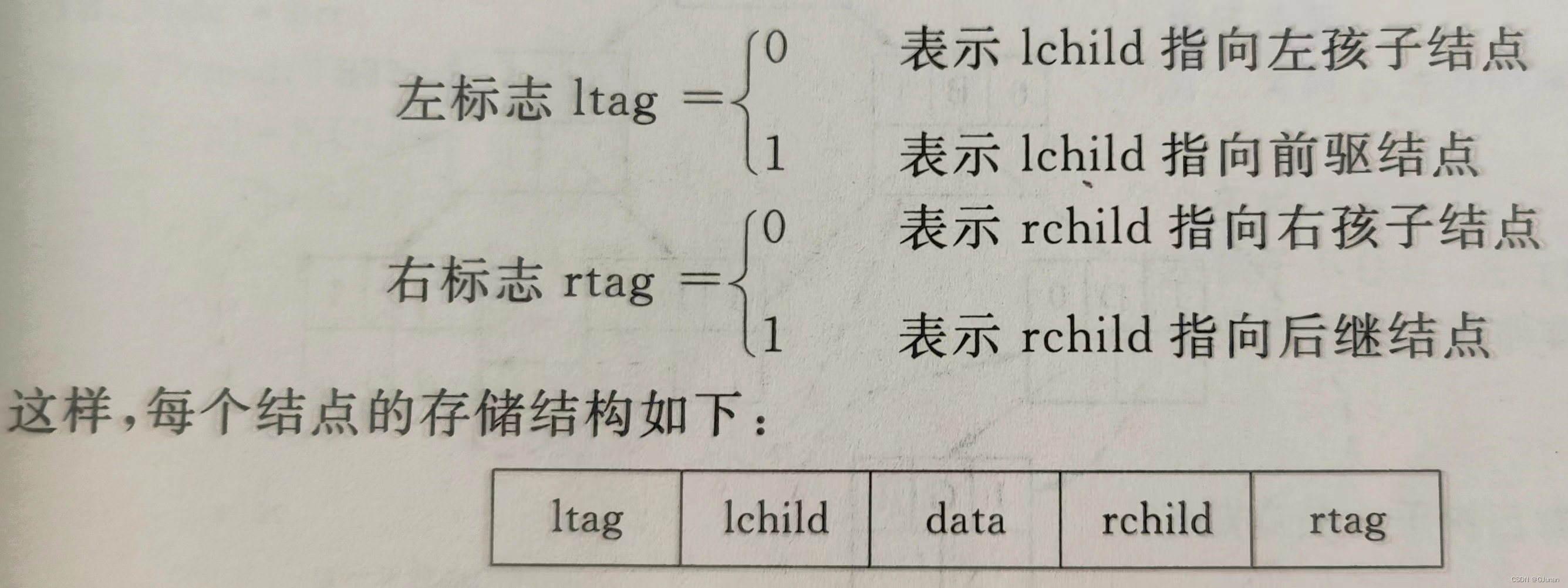
typedef struct node
{
ElemType data; //数据元素
int ltag, rtag;//线索或孩子标记
struct node* lchild; //指向左孩子结点或线索指针
struct node* rchild; //指向右孩子结点或线索指针
}TBTNode; //Tag Binary Tree Node 二叉树结点哈夫曼树:带权路径长度(WPL,Weighted Path Length)最小的二叉树称为 哈夫曼树 或 最优二叉树。方法:每次选两个最小权值组建二叉树。
并查集……
第八章 图
图的基本概念
图的存储结构和基本运算算法:邻接矩阵存储方法、邻接表存储方法(出度)、逆邻接表(入度)、十字链表、临界多重表。
一般用邻接矩阵进行数据录入,使用邻接表进行应用:
//图的两种存储结构
#define INF 32767 //定义∞
#define MAXV 100 //最大顶点个数
typedef char InfoType;
//以下定义邻接矩阵类型
typedef struct
{ int no; //顶点编号
InfoType info; //顶点其他信息
} VertexType; //顶点类型
typedef struct
{ int edges[MAXV][MAXV]; //邻接矩阵数组
int n,e; //顶点数,边数
VertexType vexs[MAXV]; //存放顶点信息
} MatGraph; //完整的图邻接矩阵类型
//以下定义邻接表类型
typedef struct ANode
{ int adjvex; //该边的邻接点编号
struct ANode *nextarc; //指向下一条边的指针
int weight; //该边的相关信息,如权值(用整型表示)
} ArcNode; //边结点类型
typedef struct Vnode
{ InfoType info; //顶点其他信息
int count; //存放顶点入度,仅仅用于拓扑排序
ArcNode *firstarc; //指向第一条边
} VNode; //邻接表头结点类型
typedef struct
{ VNode adjlist[MAXV]; //邻接表头结点数组
int n,e; //图中顶点数n和边数e
} AdjGraph; //完整的图邻接表类型图的遍历:
深度优先遍历(Depth First Search,DFS):
采用递归,创立一个遍历数组visited[vertex],未遍历的点赋值为0,已搜索过的点赋值为1。
每次搜索先输出该起点,并且visited值改为1,创建一个指针p指向下一个相邻结点,开始深度遍历,用一个循环确保相邻结点都被遍历,在循环中判断结点时否被搜索过,若未被搜索过,则进入该节点递归调用自身,向更深度搜索;若被搜索过,则p=p->next,向下一个相邻节点(另一条路)搜索,直到p为空时,循环结束,全部递归循环结束后,DFS完成。
#define MAXV 10//访问点数
int visited[MAXV] = { 0 };
void DFS(AdjGraph* G, int v)
{
ArcNode* p;
visited[v] = 1; //置已访问标记
printf("%d ", v); //输出被访问顶点的编号
p = G->adjlist[v].firstarc; //p指向顶点v的第一条弧的弧头结点
while (p != NULL)
{
if (visited[p->adjvex] == 0) //若p->adjvex顶点未访问,递归访问它
DFS(G, p->adjvex);
p = p->nextarc; //p指向顶点v的下一条弧的弧头结点
}
}广度优先遍历(Breadth First Search,DFS):
采用队列,创立一个遍历数组visited[vertex],未遍历的点赋值为0,已搜索过的点赋值为1。
先输出并进队起点,开始出队循环,出队队首,将队首的所有邻接点判断是否被遍历,若未被遍历依次输出并进队,这样不断循环完成BFS。
#include <queue>
void BFS(AdjGraph* G, int v)
{
int w, i;
ArcNode* p;
queue<int> qu; //定义队列
int visited[MAXV]; //定义顶点访问标志数组
for (i = 0; i < G->n; i++) visited[i] = 0; //访问标志数组初始化
printf("%2d", v); //输出被访问顶点的编号
visited[v] = 1; //置已访问标记
qu.push(v);
while (!qu.empty()) //队不空循环
{
w = qu.front();
qu.pop(); //出队一个顶点w
p = G->adjlist[w].firstarc; //指向w的第一个邻接点
while (p != NULL) //查找w的所有邻接点
{
if (visited[p->adjvex] == 0) //若当前邻接点未被访问
{
printf("%2d", p->adjvex); //访问该邻接点
visited[p->adjvex] = 1; //置已访问标记
qu.push(p->adjvex); //该顶点进队
}
p = p->nextarc; //找下一个邻接点
}
}
printf("\n");
}如果不是连通图的话,则需要遍历visited数组,让还没搜索到的点继续遍历。
void DFS1(AdjGraph* G)//或者BFS1
{
int i;
for (i = 0; i < G->n; i++)
{
if (visited[i] == 0)
{
DFS(G, i);//或者BFS(G, i);
}
}
}生成树和最小生成树:
生成树:
深度优先生成树(DFS Tree)
广度优先生成树(BFS Tree)
最小生成树:
普利姆算法(Prim): 适用于稠密图 时间复杂度() (n为顶点数)
创建lowcost数组记录顶点集最短相邻边,closest数组记录顶点,先赋予数组初值,lowcost装当前顶点集的路径;然后找出剩余的n-1个顶点,每次比较顶点集的所有边,找出最短边,并赋值为0,说明已经加入顶点集,然后重新赋值新顶点产生的边到lowcost数组里,以及顶点closest里。直到循环结束,完成Prim算法。
void Prim(MatGraph g, int v)
{
int lowcost[MAXV]; //顶点i是否在U中
int min;
int closest[MAXV], i, j, k;
for (i = 0; i < g.n; i++) //给lowcost[]和closest[]置初值
{
lowcost[i] = g.edges[v][i];
closest[i] = v;
}
for (i = 1; i < g.n; i++) //找出n-1个顶点
{
min = INF;
for (j = 0; j < g.n; j++) //在(V-U)中找出离U最近的顶点k
if (lowcost[j] != 0 && lowcost[j] < min)
{
min = lowcost[j];
k = j; //k记录最近顶点的编号
}
printf(" 边(%d,%d)权为:%d\n", closest[k], k, min);
lowcost[k] = 0; //标记k已经加入U
for (j = 0; j < g.n; j++) //修改数组lowcost和closest
if (g.edges[k][j] != 0 && g.edges[k][j] < lowcost[j])
{
lowcost[j] = g.edges[k][j];
closest[j] = k;
}
}
cout << endl;
} 克鲁斯卡尔算法(Kruskal): 适用于稀疏图 时间复杂度() (e为边数)
创建一个边Edge的数据结构收集边的信息(起点,终点,权值),并查集UFSTree(秩,双亲结点)
typedef struct
{
int u; //边的起始顶点
int v; //边的终止顶点
int w; //边的权值
} Edge;
typedef struct node
{
int rank; //结点对应秩
int parent; //结点对应双亲下标
} UFSTree; //并查集树结点类型有这些数据结构之后创立数组E和t,将MatGraph邻接矩阵中图的信息导入到边数组E中,对数组E按照权的大小进行排序(从小到大),初始化数组t(将每个节点看成是一颗独立的树),用k记录录入的点,j记录到达的边,进入循环依次遍历所有边,每次录入边的起点和终点,并且并查集,找出起点和终点的根节点,如果它们的根节点不相同才能进行树的按秩合并(因为如果它们是一棵树上的结点,也就是说根节点相同的话,它们之间是可以相互到达的,没有必要再进行合并了)最终合并完n-1个顶点。
void Kruskal(MatGraph g)
{
int i, j, k, u1, v1, sn1, sn2;
UFSTree t[MaxSize];
Edge E[MaxSize];
k = 1; //e数组的下标从1开始计
for (i = 0; i < g.n; i++) //由g产生的边集e
for (j = 0; j <= i; j++)
if (g.edges[i][j] != 0 && g.edges[i][j] != INF)
{
E[k].u = i; E[k].v = j; E[k].w = g.edges[i][j];
k++;
}
HeapSort(E, g.e); //采用堆排序对E数组按权值递增排序
MAKE_SET(t, g.n); //初始化并查集树t
k = 1; //k表示当前构造生成树的第几条边,初值为1
j = 1; //E中边的下标,初值为1
while (k < g.n) //生成的边数小于n时循环
{
u1 = E[j].u;
v1 = E[j].v; //取一条边的头尾顶点编号u1和v2
sn1 = FIND_SET(t, u1);
sn2 = FIND_SET(t, v1); //分别得到两个顶点所属的集合编号
if (sn1 != sn2) //两顶点属于不同的集合,该边是最小生成树的一条边
{
printf(" (%d,%d):%d\n", u1, v1, E[j].w);
k++; //生成边数增1
UNION(t, u1, v1); //将u1和v1两个顶点合并
}
j++; //扫描下一条边
}
}最短路径:
Dijkstra算法(迪杰斯特拉):从一个顶点到其余个顶点的最短路径
形似于Prim算法,创立数组s表示当前的顶点集,dist数组表示起始顶点v到达其他顶点的最短距离,数组path用来记录路径。从起始顶点v出发,先初始化各个数组,然后将邻接矩阵中的值(顶点v的的边)录入到dist数组中,再根据数组S判断当前dist中最短路径是否加入顶点集,从未被加入顶点集的最短dist边,加入顶点集,然后再把这个顶点的出边与dist中的值进行比较,若短于当前的边,则将其录入相应的dist中,已经加入顶点集的点,则特殊值表示已经录入,S[i]=1,然后修改对应的path,使之指向该路径的前一个顶点,这样循环结束后,即可得到dist数组与path数组。
输出路径:输出从一个顶点到其余个顶点的最短路径,最短路径dist记录着其数值,path记录着路径,找到对应的path,上面提到了,它是指向前一个顶点,这样不断回溯,就找齐了最短路径所需路径。
void Dijkstra(MatGraph g, int v) //Dijkstra算法
{
int dist[MAXV], path[MAXV];//distance,path
int S[MAXV]; //S[i]=1表示顶点i在S中, S[i]=0表示顶点i在U中
int Mindis, i, j, u;
for (i = 0; i < g.n; i++)
{
dist[i] = g.edges[v][i]; //距离初始化
S[i] = 0; //S[]置空
if (g.edges[v][i] < INF) //路径初始化
path[i] = v; //顶点v到顶点i有边时,置顶点i的前一个顶点为v
else
path[i] = -1; //顶点v到顶点i没边时,置顶点i的前一个顶点为-1
}
S[v] = 1; path[v] = 0; //源点编号v放入S中
for (i = 0; i < g.n - 1; i++) //循环直到所有顶点的最短路径都求出
{
Mindis = INF; //Mindis置最大长度初值
for (j = 0; j < g.n; j++) //选取不在S中(即U中)且具有最小最短路径长度的顶点u
if (S[j] == 0 && dist[j] < Mindis)
{
u = j;
Mindis = dist[j];
}
S[u] = 1; //顶点u加入S中
for (j = 0; j < g.n; j++) //修改不在S中(即U中)的顶点的最短路径
if (S[j] == 0)
if (g.edges[u][j] < INF && dist[u] + g.edges[u][j] < dist[j])
{
dist[j] = dist[u] + g.edges[u][j];
path[j] = u;
}
}
}Floyd算法(弗洛伊德):每对顶点之间的最短路径
创建两个矩阵,一个最短路径矩阵A,一个路径矩阵path。先初始化(A相当于邻接矩阵,path中对应邻接矩阵,直接可达路径的则将路径的起点赋值到相应的path中,不直接可达赋值-1),然后从起点顶点开始,不断遍历顶点,借助该顶点,再遍历A中的所有最短路径,从i到j在借助已知最短路径和该顶点的出边能否以更短的路径到达,若能则替代,并将path中的对应的path[i][j]的值更改为路径终点j的前一个顶点。
输出路径:顶点i到顶点j之间的最短路径就是A[i][j]中的值,其路径就是path[i][j]中的对应的数字,也是不断地在path[i]中回溯,每次path的值就是所经过的顶点,直到起点,然后输出。
void Floyd(MatGraph g) //Floyd算法
{
int A[MAXV][MAXV], path[MAXV][MAXV];
int i, j, k;
for (i = 0; i < g.n; i++)
for (j = 0; j < g.n; j++)
{
A[i][j] = g.edges[i][j];
if (i != j && g.edges[i][j] < INF)
path[i][j] = i; //顶点i到j有边时
else
path[i][j] = -1; //顶点i到j没有边时
}
for (k = 0; k < g.n; k++) //依次考察所有顶点
{
for (i = 0; i < g.n; i++)
for (j = 0; j < g.n; j++)
if (A[i][j] > A[i][k] + A[k][j])
{
A[i][j] = A[i][k] + A[k][j]; //修改最短路径长度
path[i][j] = path[k][j]; //修改最短路径
}
}
}拓扑排序:按照有向图的顺序进行顶点的选择,这会产生不同的顺序,这些顺序就是拓扑排序。(在一个有向图中找一个拓扑排序的过程称为拓扑排序)
AOE网与关键路径:AOE网(activity on edge)叫做工程,顶点叫做事件,边叫做活动,根据拓扑排序以及拓扑排序逆序,在原有图上找到所有事件的最早开始时间ve(event early),最迟开始时间vl(event late),然后根事件的时间找出每个活动的最早开始时间e,最迟开始时间l,活动的最早与最迟时间之差,如果为零,则为关键路径,因为没有时间可以多出来使用了。
第九章 查找
ASL(平均查找长度(Average Search Length))
线性表的查找:
顺序查找(SequentialSearch)[O(n)]、
折半查找(BinarySearch)[O()]、
索引存储分块查找(BlockSearch)[O()(按照
分块)]、
二叉排序树(BST树)(依次比根小左子树,比根大右子树,使用递归查找,删除补上左子树)、
平衡二叉树(AVL树)(特殊的二叉排序树,为了提高确保查找效率 最坏也是O())
在二叉排序树的基础上,插入时确保左右平衡,控制树的高度,判断平衡因子(balance factor,bf)进行二叉树的调整;在删除时,和二叉排序树一样,但是需要进行调整。
红黑树(AVL需要牺牲插入,来提高查找效率,当多次插入时,为提高效率,采用红黑树)
B_树(B Tree)(根据B_树的阶m插入进行分裂,删除进行合并,查找O())
B+树(B_树的变形,查找需要到叶子节点,,应用到操作系统中)
哈希表(哈希冲突(开放定址法(线性探测法、平方探测法),拉链法))
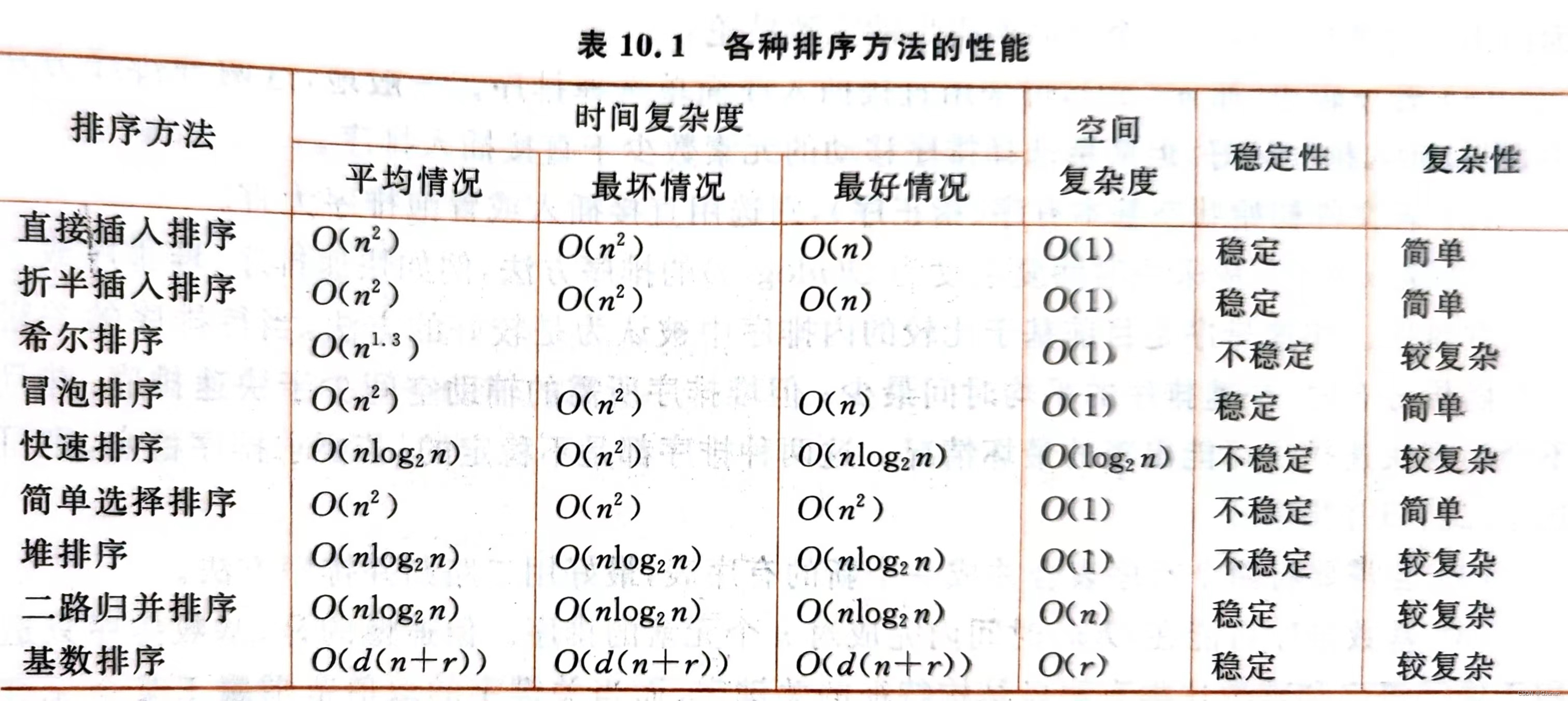
第十章 内排序
插入排序(直接插入排序(O())、折半插入排序(O(
))、希尔排序(O(
)))
交换排序(冒泡排序(O())、快速排序(O(
))、选择排序( O(
))、堆排序(O(
))、
归并排序( O())、基数排序(O(d(n+r)))
第十一章 外排序
磁盘排序:多路平衡归并、最佳归并树
磁带排序:多路平衡归并排序、多阶段归并排序
第十二章 文件
外存上的文件,常用文件组织方式:顺序文件、索引文件、哈希文件、多关键字文件……
第十三章 采用面向对象的方法描述算法
熟练使用STL(Standard Template Library)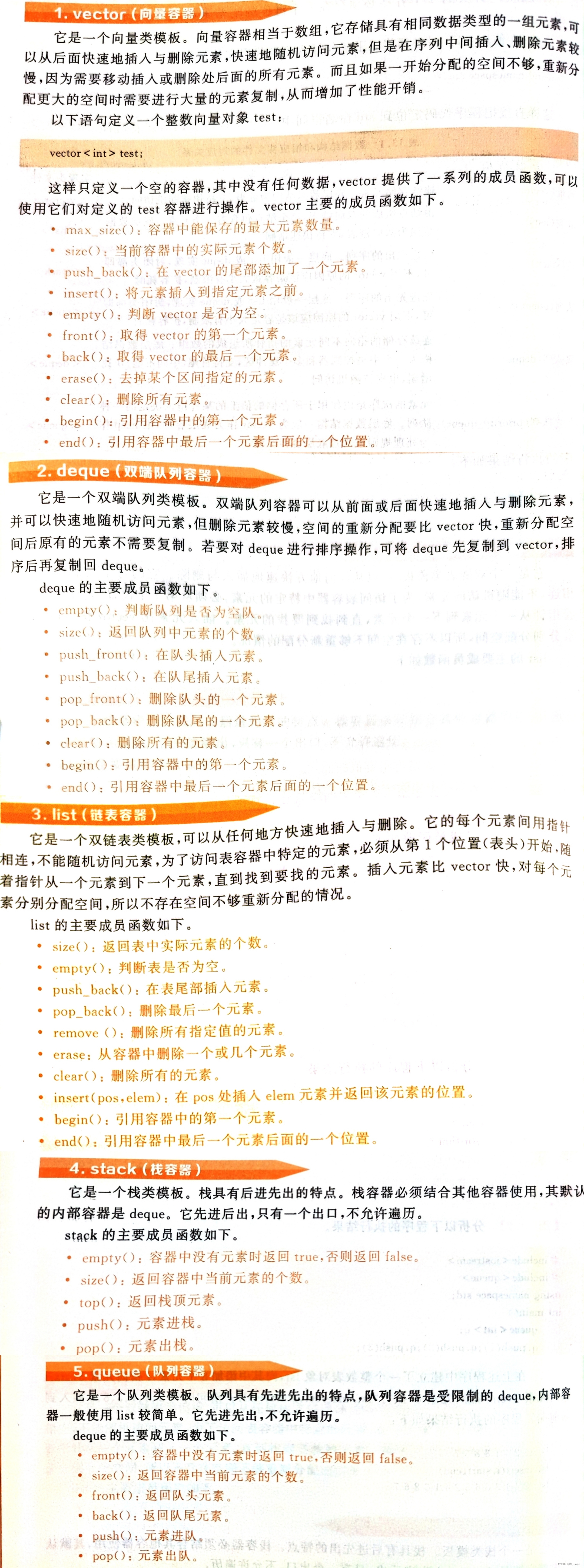














 1612
1612











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









