







最近在LinkedIn看到HuggingFace 联合创始人Thomas Wolf发布的消息:

领英链接:https://www.linkedin.com/posts/thom-wolf_i-was-playing-with-a-new-robotics-framework-activity-7182825998869000192-F4AM?utm_source=share&utm_medium=member_desktop
他点赞的是一个ROS的替代开源软件Dora-rs,其更容易安装并完全集成到 python 生态系统中。Dora-rs采用 Rust 语言,使用 Apache Arrow的零拷贝技术。
Thomas Wolf展示其应用的1分钟视频也可在小红书上看到:
http://xhslink.com/YXVwYGxhslink.com/YXVwYG
Dora-rs的GitHub项目:
GitHub - dora-rs/dora: low latency, composable, and distributed dataflow for AI and robotic applicationgithub.com/dora-rs/dora
它是一个面向数据流的机器人应用程序,使机器人应用程序的创建变得快速、简单的框架;构建机器人应用程序可以概括为将硬件、算法和人工智能模型结合在一起,并使它们相互通信。
在 Dora-rs,1)支持Python、C、C++以及ROS2,使硬件和软件的集成变得容易;2)使用零拷贝 Apache Arrow 消息来降低通信延迟;3)Dora-rs 仍处于实验阶段,继续开发中。
Dora-rs 的性能,与 Python 中当前的 ROS2 相比,快达 17 倍!这是使用共享内存服务器和Apache Arrow实现零拷贝数据传递的结果。
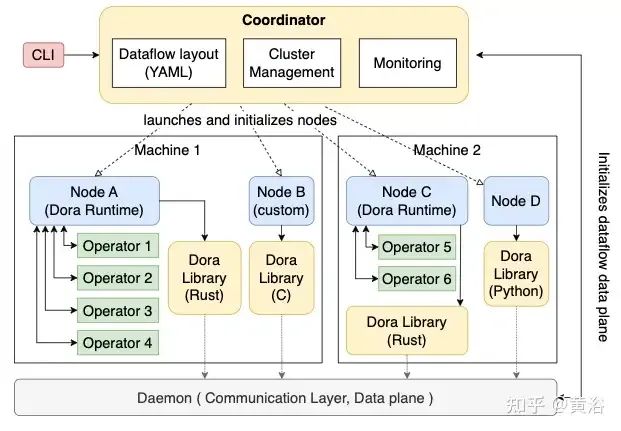
Dora-rs 实现了一种声明性数据流模式,其中任务在作为单独进程隔离的节点之间分割。每个节点定义其输入和输出以与其他节点连接。
节点可以是:
-
Dora-rs 的自定义节点作为库嵌入。
-
运行时节点是 dora-rs 负责主循环并运行用户定义的运算符。
数据流的优点是创建抽象层,使机器人应用程序模块化且易于配置。
节点以 Apache Arrow 数据格式进行通信。Apache Arrow 是一种适用于平级和分层数据的通用内存格式。Arrow 内存格式支持零拷贝读取,可实现快速的数据访问,去除序列化开销。它定义一个 C 数据接口,没有任何构建时或链接时依赖性要求,这意味着 Dora-rs 不需要如编译器那样的编译步骤。

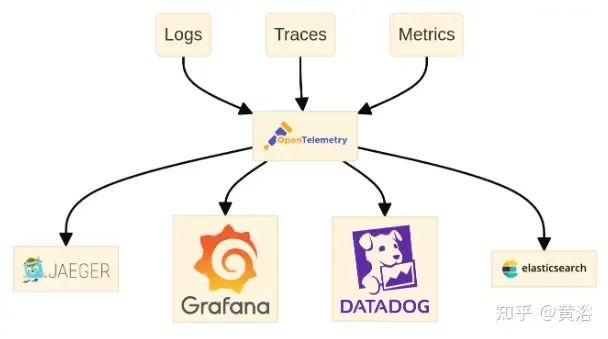
Dora-rs 使用 Opentelemetry 来记录所有日志、指标和跟踪。这意味着数据和遥测可以使用共享抽象来链接。Opentelemetry 是一个开源可观测标准,使 Dora-rs 数据可以被大多数后端(如 elastic search、prometheus、Datadog)收集。Opentelemetry 与语言无关,与后端无关,并且可以轻松收集分布式数据,使其非常适合 Dora-rs 应用程序。
Dora-rs 为 python 实现热重载,这意味着可以在 Python 中运行时更改代码,同时保持状态不变。

将热重载与检索增强生成 (RAG) 相结合,可以轻松创建自编码机器人,根据提示生成代码修改。
今年2月在比利时布鲁塞尔召开的软件开发者聚会FOSDEM(FOSDEM 2024 - Home)上,Dora-rs的两位主要开发者Xavier TAO和Philip Oppermann做了详细的介绍:
FOSDEM 2024 - Dora-rs: simplifying robotics stack for next gen robots
地址:https://fosdem.org/2024/schedule/event/fosdem-2024-3225-dora-rs-simplifying-robotics-stack-for-next-gen-robots/
PPT下载地址:
https://fosdem.org/2024/events/attachments/fosdem-2024-3225-dora-rs-simplifying-robotics-stack-for-next-gen-robots/slides/22303/dora-fosdem_05S0HAi.pdf
(本文作者黄浴,GOSIM开源创新汇授权转载)


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









