







 该报告详细分析了人形机器人中的感知模块,强调了传感器在实现更精确的交互和控制中的重要性。涉及的传感器包括位觉、视觉、关节力控、手腕脚踝及触觉传感器,以及六维力矩传感器的技术特点。特斯拉和国内厂商在设计上的差异也有所揭示。
该报告详细分析了人形机器人中的感知模块,强调了传感器在实现更精确的交互和控制中的重要性。涉及的传感器包括位觉、视觉、关节力控、手腕脚踝及触觉传感器,以及六维力矩传感器的技术特点。特斯拉和国内厂商在设计上的差异也有所揭示。
今天分享的是人形机器人系列深度研究报告:《人形机器人专题:更精确的感知,更高效的交互》。
(报告出品方:东吴证券)
报告共计:44页
精选报告来源:人工智能学派
感知模块是人形机器人具身智能的基础
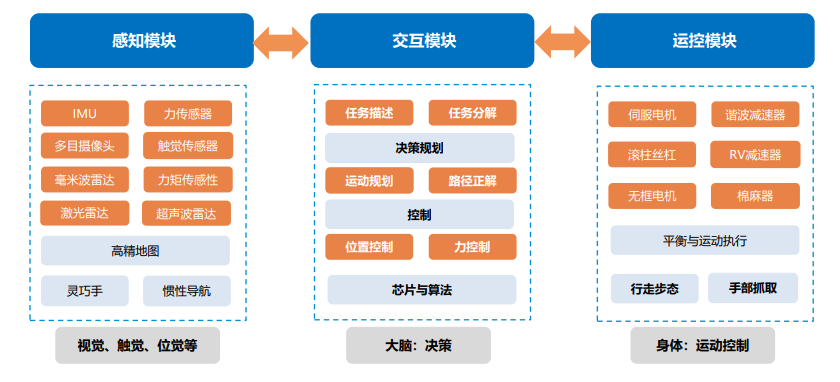
◆ 感知是交互的基础:人形机器人包括感知模块、交互模块、运控模块,感知模块是基础,为交互与运控模块 提供信息,并实时反馈,以便机器人感知外部环境和物体、调整运控规划。
◆ 感知是软硬件结合,遍布全身,不同传感器进行数据融合:类似于人类的各类感官神经,提供视觉、位觉、 触觉、力觉等信息,分布于人形机器人的各类关节中,包含软硬件算法,各数据可进行融合,提供运控规划 准确性。
人形机器人传感器至关重要,遍布全身
◆ 位觉传感器:使用量1颗IMU,用来测量机器人的运动及姿态信息,一个价格400-2000元,未来或取消。
◆ 视觉传感器:国内深度相机+激光雷达,特斯拉为纯视觉方案,1个鱼目摄像头+2个普通摄像头。
◆ 关节力控传感器:特斯拉每个线性关节在电机外分别放置1个一维压力传感器;每个旋
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









