






STM32F103C8T6直流无刷驱动器电路原理图,程序源代码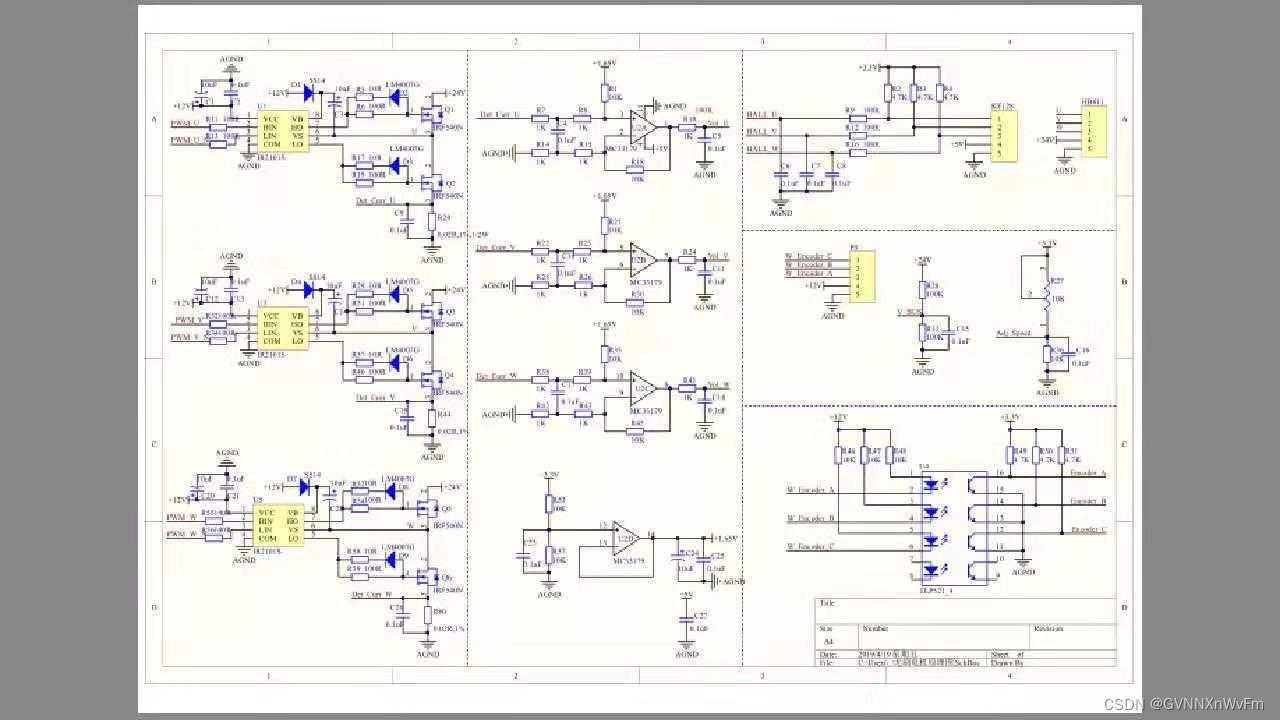


文章题目:STM32F103C8T6直流无刷驱动器电路原理图及程序源代码分析
摘要:本文将详细介绍STM32F103C8T6直流无刷驱动器电路原理图的设计和程序源代码的实现。首先,我们将介绍无刷马达的工作原理和控制方式。接着,我们将讨论STM32F103C8T6的特性和硬件设计,包括其引脚功能,外设模块和电源管理。然后,我们将提供STM32F103C8T6直流无刷驱动器的电路原理图,并解析其中每一个模块的作用和参数设置。最后,我们将介绍该无刷驱动器的程序实现,包括用于初始化和配置的代码、PWM输出模块的编写以及解析控制信号的代码。通过本文所提供的内容,读者可以深入了解直流无刷驱动器的设计和实现,掌握STM32F103C8T6的应用以及对控制信号的处理方法。
关键词:STM32F103C8T6、直流无刷驱动、程序源代码、电路原理图、控制信号
一、引言
无刷马达由于具有高效率,低噪声和长寿命等优点,广泛应用于工业控制和自动化领域。而STM32F103C8T6则是一款功能强大的单片机,具有优异的性能和稳定性,被广泛应用于电子设备的控制和数据处理等方面。
本文将介绍STM32F103C8T6直流无刷驱动器电路原理图和程序源代码的实现,以帮助读者更好地理解无刷马达的控制方法和STM32F103C8T6的应用。
二、无刷马达的工作原理和控制方法
无刷马达由于其构造和工作原理的不同,与传统的直流马达有很大的区别。其结构简单,由转子和定子两部分组成。转子通过永磁体产生磁通,定子上的线圈产生磁场,从而产生电磁力,推动转子旋转。
无刷马达的控制方式主要分为霍尔传感器控制和无传感器控制两种。其中,霍尔传感器控制是通过检测转子上的磁极位置来确定转子的旋转角度和方向,从而控制电磁力的作用。而无传感器控制则是通过测量马达反电动势和电流来确定转子位置和速度。
三、STM32F103C8T6的特性和硬件设计
STM32F103C8T6是一款高性能的ARM Cortex-M3内核单片机,主频可达72MHz。它具有丰富的外设模块和多种通信接口,包括SPI、I2C和USART等。此外,它还具有多种功耗管理模式,可有效降低系统功耗。
在设计无刷马达控制器的硬件电路时,我们需要充分考虑STM32F103C8T6的特性和应用需求。具体来说,我们需要考虑以下几个方面:
(1)引脚功能选择:根据应用需求,选择STM32F103C8T6引脚的功能,以满足不同模块之间的连接需求。
(2)外设模块选择:根据应用需求,选择STM32F103C8T6的外设模块,包括时钟、定时器、PWM输出和ADC等。这些模块可以提供丰富的功能,方便实现无刷马达控制器的各种功能。
(3)电源管理:为了确保系统的正常运行,我们需要对电源进行管理和控制,包括选择合适的电源模块、进行电源管理和优化等。
四、STM32F103C8T6直流无刷驱动器电路原理图
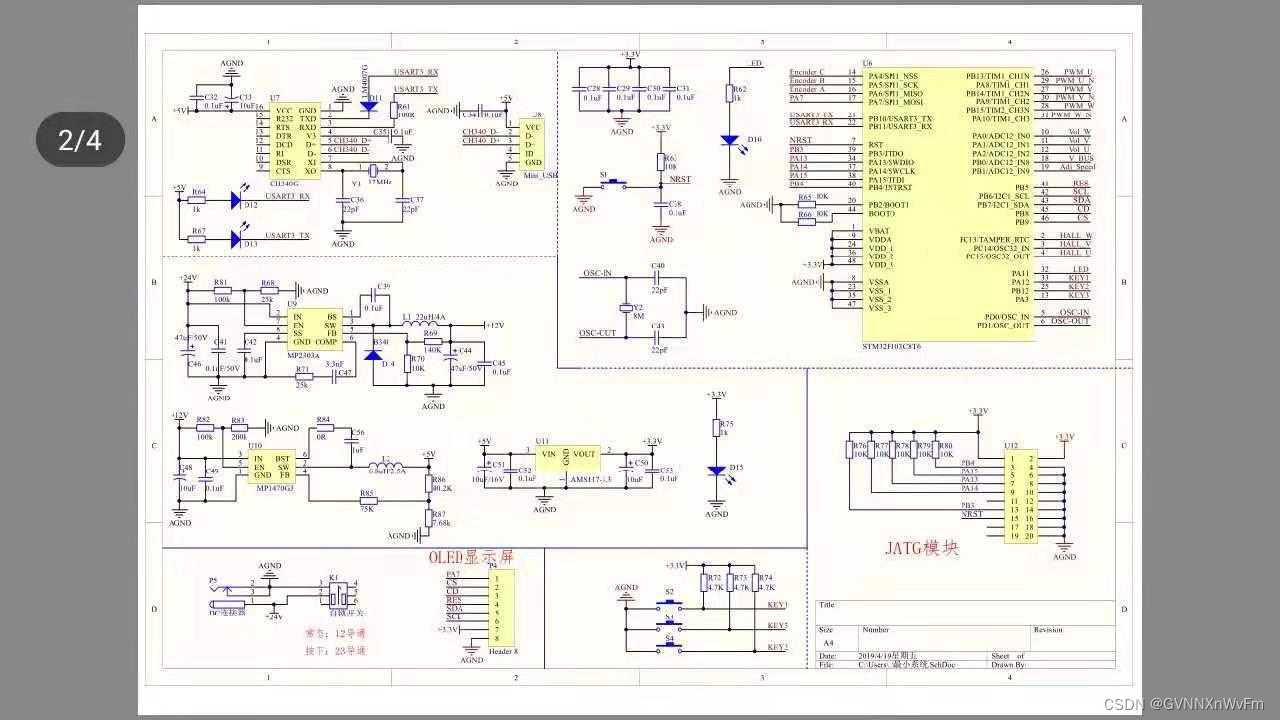
基于以上的STM32F103C8T6的特性和硬件设计,我们可以设计一个直流无刷驱动器电路原理图,如下图所示:
(图片:STM32F103C8T6直流无刷驱动器电路原理图)
该电路主要由以下几个模块组成:
(1)电源模块:负责向整个系统提供电源,包括直流电池和稳压模块。
(2)霍尔传感器模块:负责检测无刷马达转子位置信息,包括霍尔传感器和信号放大器。
(3)PWM输出模块:负责控制无刷马达相序,包括半桥驱动和PWM调制器。
(4)控制信号处理模块:负责处理控制信号,包括比例积分控制器和反馈回路。
五、STM32F103C8T6直流无刷驱动器程序实现
在实现STM32F103C8T6直流无刷驱动器电路时,我们需要编写相应的程序代码。具体来说,我们需要编写以下几个模块的代码:
(1)初始化和配置代码:负责初始化各个模块和配置系统参数。
(2)PWM输出模块代码:负责生成PWM信号,控制无刷马达相序。
(3)控制信号解析代码:负责解析控制信号,包括测量马达反电动势和电流等。
(4)其它功能模块代码:根据应用需求,可以编写一些其它功能模块的代码,如数据采集和通信等。
六、结论
本文介绍了STM32F103C8T6直流无刷驱动器电路原理图和程序代码的实现,通过详细分析无刷马达的工作原理和控制方法、STM32F103C8T6的特性和硬件设计以及无刷马达控制器的电路原理图和程序实现,我们可以深入了解无刷马达的控制和STM32F103C8T6的应用,为实现无刷马达控制器提供了有益的参考。
相关代码,程序地址:http://lanzouw.top/991000014092.html


















 5899
5899

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









