






Simulink集成外部C语言实现PID功能,与Simulink自带pid模块功能一致。
可直接进行DSP28335等的代码生成,拖过来直接用,加快开发进度。
下图三显示这6种方式达到了基本一致的效果。
内含一份详细说明操作的文档。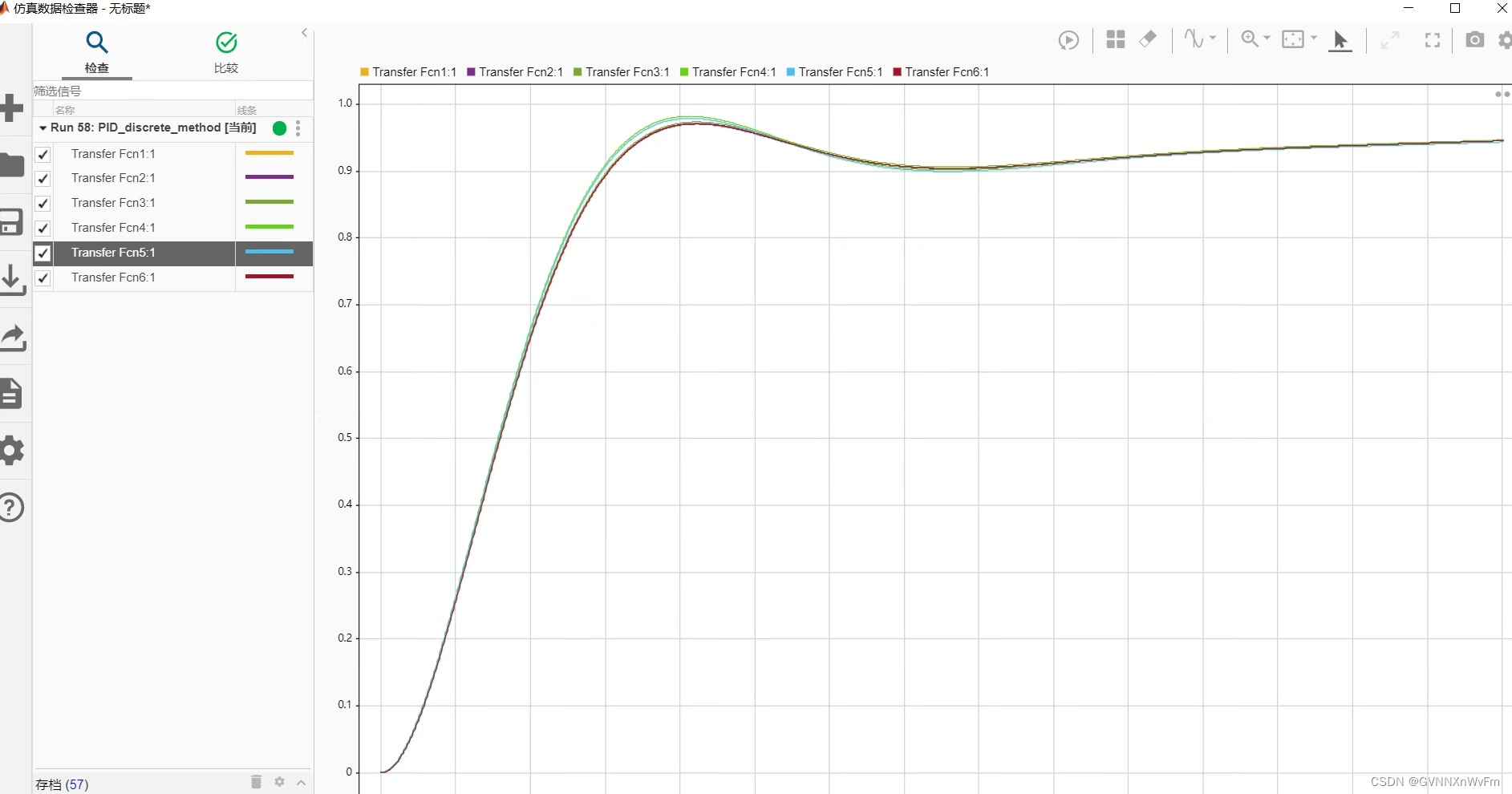


Simulink集成外部C语言实现PID算法,是一种在工业自动化领域广泛应用的控制算法。与Simulink自带的PID模块功能一致,该技术可以实现控制系统中的稳定性和准确性,提高控制系统的响应速度和稳定性,进一步实现控制系统的优化运行。同时,该技术还具有操作简便、可视化编程等优势,可以快速地实现PID算法,加快开发进度。
Simulink是一种基于模型的设计方法,它的优点在于可以方便地进行复杂系统的建模和仿真。而PID算法是一种控制算法,包括比例、积分、微分三个控制环节,可以通过不同的参数来实现系统的稳定性和响应速度。将这两种技术结合起来,可以实现对控制系统的全面优化。
在Simulink中,通过将外部C语言代码嵌入模型中,就可以实现PID算法的集成。由于C语言具有高效、灵活的特点,因此可以更好地实现PID算法的功能。同时,这种方法可以直接进行DSP28335等芯片的代码生成,因此可以实现快速开发并直接运行代码。
值得注意的是,Simulink集成外部C语言实现PID算法需要了解一些相关的操作技巧。在使用过程中,用户需要注意代码的编写,尤其需要注意各个参数的调整,以实现最佳的效果。同时,在使用过程中,用户还应注意各个模块之间的相互调用关系,避免出现系统出错的情况。
总的来说,通过Simulink集成外部C语言实现PID算法,可以实现控制系统的稳定性和准确性,进一步优化控制系统的运行效率。同时,该技术具有操作简便、可视化编程等优势,适用于工业自动化领域的各种控制系统。因此,这种技术具有重要的应用价值。
相关代码,程序地址:http://lanzouw.top/703495185180.html















 487
487











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









