






西门子博图1214c组态的运动控制学习案列,画圆,画方,相对运动,绝对运动,点动回原点,注释全面,博图v15.1版本
西门子博图1214C运动控制学习案例:从基础到实战
最近在学习西门子博图1214C的运动控制功能,感觉这东西挺有意思的,但刚开始接触时有点懵。不过通过实践,慢慢理清楚了思路。今天就来分享一下我的学习过程,包括画圆、画方、相对运动、绝对运动以及点动回原点这几个功能的实现。
一、总体方案概述
先说说硬件配置:我用的是西门子S7-1200 PLC,CPU型号是1214C,搭配一个MM440变频器和一个伺服电机。方面用的是博图V15.1,这个版本的界面和功能都挺完善。
目标是通过PLC控制伺服电机,完成以下动作:
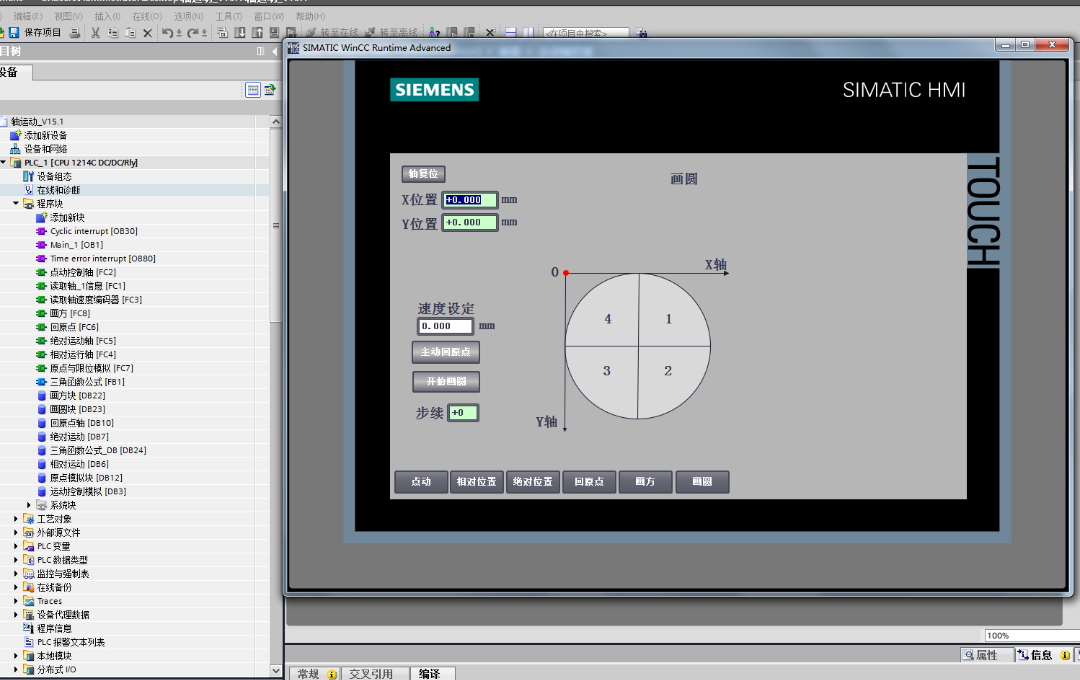
- 画圆:让电机按照圆形轨迹运行。
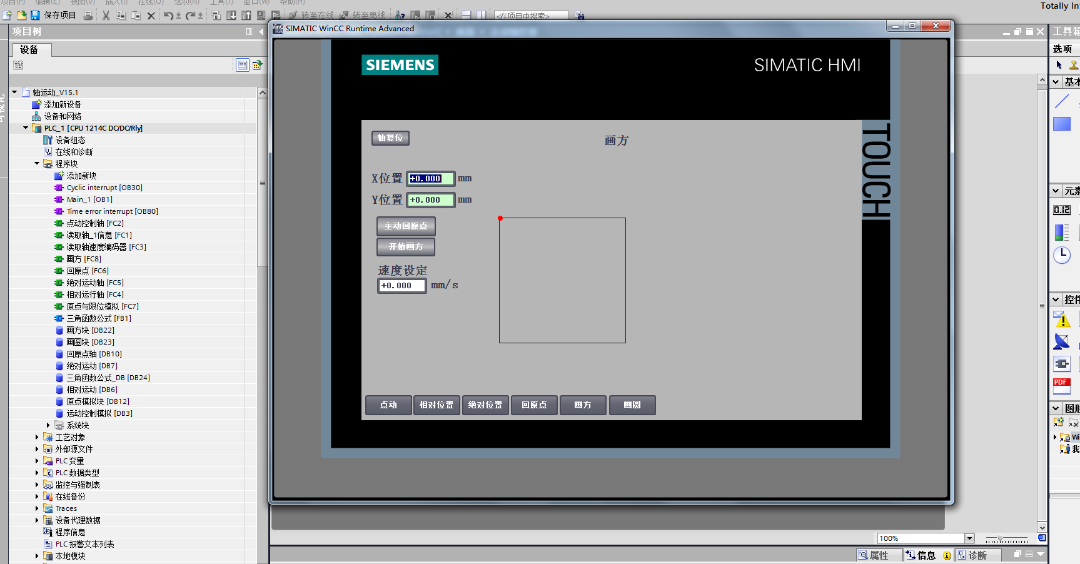
- 画方:让电机按照方形轨迹运行。
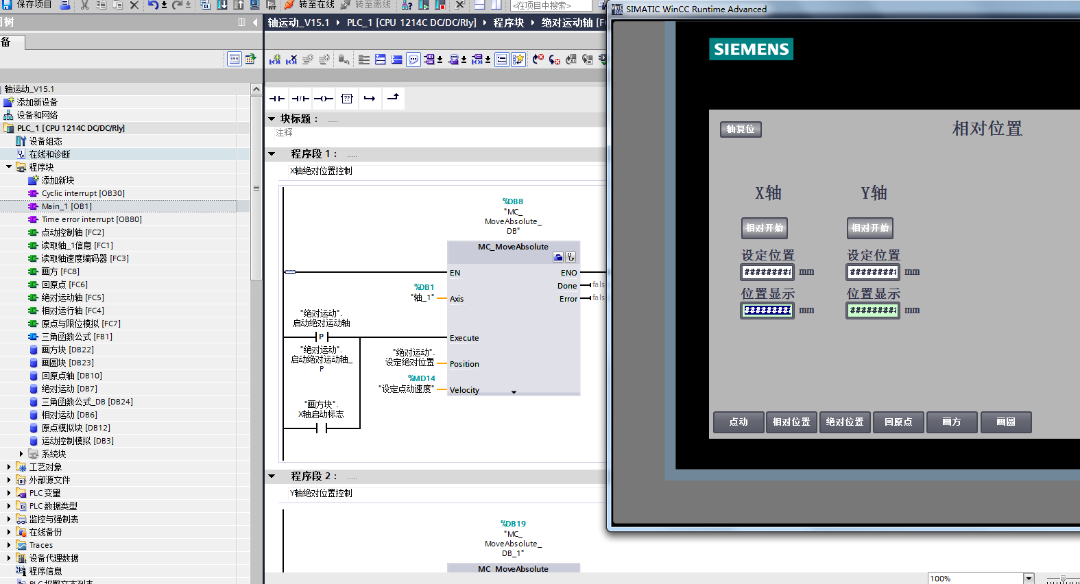
- 相对运动:以当前位置为基准,移动一定距离。
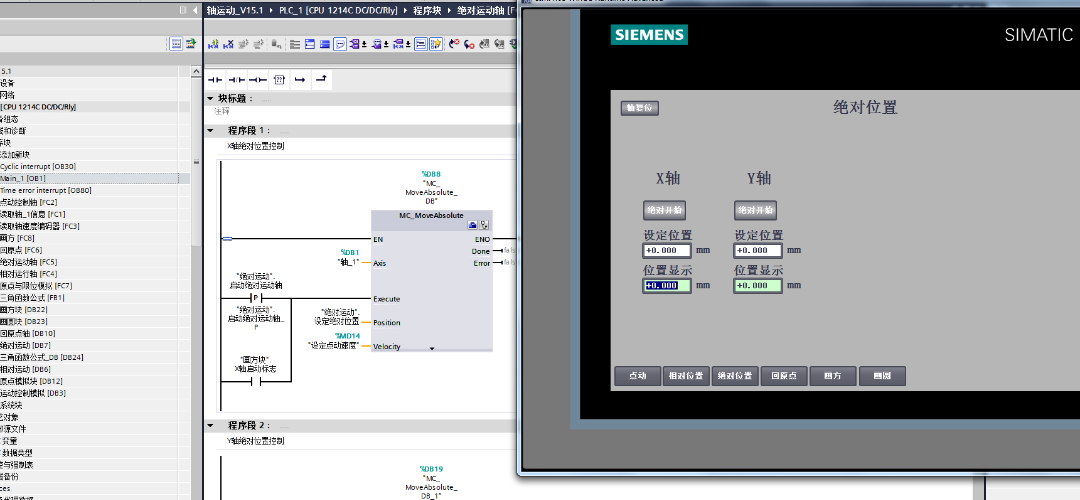
- 绝对运动:以原点为基准,移动到指定位置。
- 点动回原点:通过点动操作,让电机回到原点。
二、画圆功能实现
画圆的思路是让电机按照正弦和余弦函数的组合来移动。具体来说,就是通过两个轴的相对运动来实现圆的轨迹。
代码实现:
// 定义圆的半径
RADIUS := 50;
// 计算X轴和Y轴的位置
X_POSITION := RADIUS * COS(ANGLE);
Y_POSITION := RADIUS * SIN(ANGLE);
// 更新角度
ANGLE := ANGLE + 1;
IF ANGLE >= 360 THEN
ANGLE := 0;
END_IF;
代码分析:
RADIUS是圆的半径,可以根据需要调整。X_POSITION和Y_POSITION分别是X轴和Y轴的位置,通过三角函数计算得出。ANGLE是角度变量,每次循环增加1度,完成一个圆的轨迹。
三、画方功能实现
画方的思路是让电机沿着X轴和Y轴交替移动,形成一个正方形的轨迹。
代码实现:
// 定义正方形的边长
SIDE_LENGTH := 100;
// 判断当前方向
CASE CURRENT_DIRECTION OF
0: // 向右移动
X_POSITION := X_POSITION + SIDE_LENGTH;
CURRENT_DIRECTION := 1;
1: // 向上移动
Y_POSITION := Y_POSITION + SIDE_LENGTH;
CURRENT_DIRECTION := 2;
2: // 向左移动
X_POSITION := X_POSITION - SIDE_LENGTH;
CURRENT_DIRECTION := 3;
3: // 向下移动
Y_POSITION := Y_POSITION - SIDE_LENGTH;
CURRENT_DIRECTION := 0;
END_CASE;
代码分析:
SIDE_LENGTH是正方形的边长。CURRENT_DIRECTION用于判断当前的移动方向,0表示向右,1表示向上,2表示向左,3表示向下。- 每完成一个方向的移动,就切换到下一个方向。
四、相对运动与绝对运动
相对运动和绝对运动的区别在于基准点不同。相对运动以当前位置为基准,而绝对运动以原点为基准。
相对运动代码:
// 相对移动50个单位
RELATIVE_X := 50;
RELATIVE_Y := 50;
// 更新当前位置
CURRENT_X := CURRENT_X + RELATIVE_X;
CURRENT_Y := CURRENT_Y + RELATIVE_Y;
绝对运动代码:
// 绝对移动到(100, 100)
ABSOLUTE_X := 100;
ABSOLUTE_Y := 100;
// 直接设置当前位置
CURRENT_X := ABSOLUTE_X;
CURRENT_Y := ABSOLUTE_Y;
代码分析:
- 相对运动通过在当前位置基础上增加偏移量来实现。
- 绝对运动直接将当前位置设置为指定坐标。
五、点动回原点
点动回原点的功能是通过手动操作让电机回到原点。这个功能在实际应用中非常有用,比如设备调试或复位。
代码实现:
// 点动回原点按钮按下
IF HOME_BUTTON = 1 THEN
// 设置当前位置为原点
CURRENT_X := 0;
CURRENT_Y := 0;
END_IF;
代码分析:
HOME_BUTTON是一个输入信号,表示点动回原点按钮是否按下。- 当按钮按下时,直接将当前位置设置为原点。
六、实际应用中的思考
在实际项目中,这些功能可以组合使用。例如,先画一个圆,再画一个方,或者通过相对运动和绝对运动的结合,实现更复杂的轨迹。
另外,还需要注意以下几点:
- 电机的限位保护:在实际运行中,要避免电机超出机械行程,可以通过限位开关来实现保护。
- 速度和加速度控制:根据实际需求调整电机的速度和加速度,避免过冲或振动。
- PLC与变频器的通信:确保PLC和变频器之间的通信正常,可以通过博图中的“运动控制”功能块来配置。
七、结语
通过这次学习,我对西门子博图1214C的运动控制功能有了更深入的理解。从画圆、画方到相对运动、绝对运动,再到点动回原点,每一步都让我对运动控制有了新的认识。虽然过程中遇到了一些问题,但通过查阅资料和实践,最终都解决了。
如果你也对运动控制感兴趣,不妨动手试试,相信你会有不一样的收获!
打开博图V15.1工程,新建个1214C项目。先组态个虚拟伺服轴,工艺对象里选"TO_PositioningAxis",这个玩意儿是咱们今天搞运动控制的核心载体。轴参数设置别慌,加速度填个0.5m/s2,急停减速倍率给个200%,这些参数后面跑轨迹时能避免突然急刹车的尴尬。
先整点简单的——点动控制。在OB1里拖个MC_MoveJog指令块:
MC_MoveJog(
Axis := "Axis_1", // 轴名称
JogForward := "Jog_Right",// 正向点动按钮信号
JogBackward := "Jog_Left",// 反向点动按钮信号
Velocity := 500.0, // 点动速度mm/s
Acceleration := 0.3, // 加速度参数
Deceleration := 0.3); // 减速度参数
这代码块就像游戏手柄的方向键,按住按钮轴就开始慢慢溜达。注意速度值别超过轴参数里的最大限速,要不然PLC直接给你报个错误代码。
画方操作得用相对定位,MC_MoveRelative指令是主力:
FOR #i := 0 TO 3 DO
MC_MoveRelative(
Axis := "Axis_1",
Distance := 100.0, // 单边长度100mm
Velocity := 800.0,
Direction := (#i MOD 2) ? 1 : -1, // 方向切换
BufferMode := 1); // 缓冲模式
WAIT UNTIL "Axis_1".Status == 2; // 等待单段运动完成
END_FOR;
这个FOR循环走四次,通过取余运算切换运动方向,走出个正方形轨迹。BufferMode参数设成1表示各段运动首尾相接,要是改成2就变成运动队列了。
画圆得祭出MC_MoveCircular指令:
MC_MoveCircular(
Axis := "Axis_1",
CircleAxis := "Axis_2", // 配合运动的第二轴
Radius := 50.0, // 半径50mm
Angle := 360.0, // 整圆
Velocity := 600.0,
StartMode := 3); // 绝对位置启动
重点在CircleAxis参数,这里需要两个轴配合做插补运动。实际项目中得注意两轴的机械耦合关系,别整成画椭圆了。Angle参数给个360度才算完整闭环,要是给180度就是画半圆溜达。
回原点操作最怕玄学问题,这个写法稳当:
MC_Home(
Axis := "Axis_1",
Mode := 3, // 带编码器零脉冲模式
Position := 0.0, // 机械零点坐标
Execute := "Home_Trigger",// 触发信号
Done => "Home_Done"); // 完成状态输出
Mode参数选3是经过硬限位开关后找编码器零脉冲,比单纯的位置回零靠谱。调试时记得在轴监控里观察实际位置值变化,有时候机械结构有间隙会导致回零后还有微小偏移。
绝对运动和相对运动最大的区别在坐标参考系:
// 绝对运动到200mm位置
MC_MoveAbsolute(
Axis := "Axis_1",
Position := 200.0,
Velocity := 1000.0);
// 相对当前位置移动50mm
MC_MoveRelative(
Axis := "Axis_1",
Distance := 50.0,
Velocity := 800.0);
绝对定位像手机地图导航,永远以原点为基准;相对定位像计步器,走一步算一步。项目中混用时千万注意坐标系的切换,别搞出"鬼畜运动"。
调试时多打开Trace功能抓取实时位置曲线,看实际运动曲线是否平滑。遇到过给800mm/s速度但加速度设置过低,结果实际速度像老牛拉破车,这时候就得把轴参数里的加速度值往上调,但别超过电机性能极限。
最后提醒下,所有运动控制指令的Execute管脚最好用上升沿触发,避免长信号导致的重复执行。运动过程中要是突然掉使能,轴会按急停减速曲线停车,这个特性在安全保护里特别重要,但也可能让新手困惑为什么运动没走完。
西门子博图1214c组态的运动控制学习案列,画圆,画方,相对运动,绝对运动,点动回原点,注释全面,博图v15.1版本





















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









